(주)미라콤아이앤씨
협업 검사로봇의 제어 방법 및 이를 이용한 장치
METHOD FOR CONTROLLING COLLABORATIVE INSPECTION ROBOT, APPARATUS USING THE SAME
특허 요약
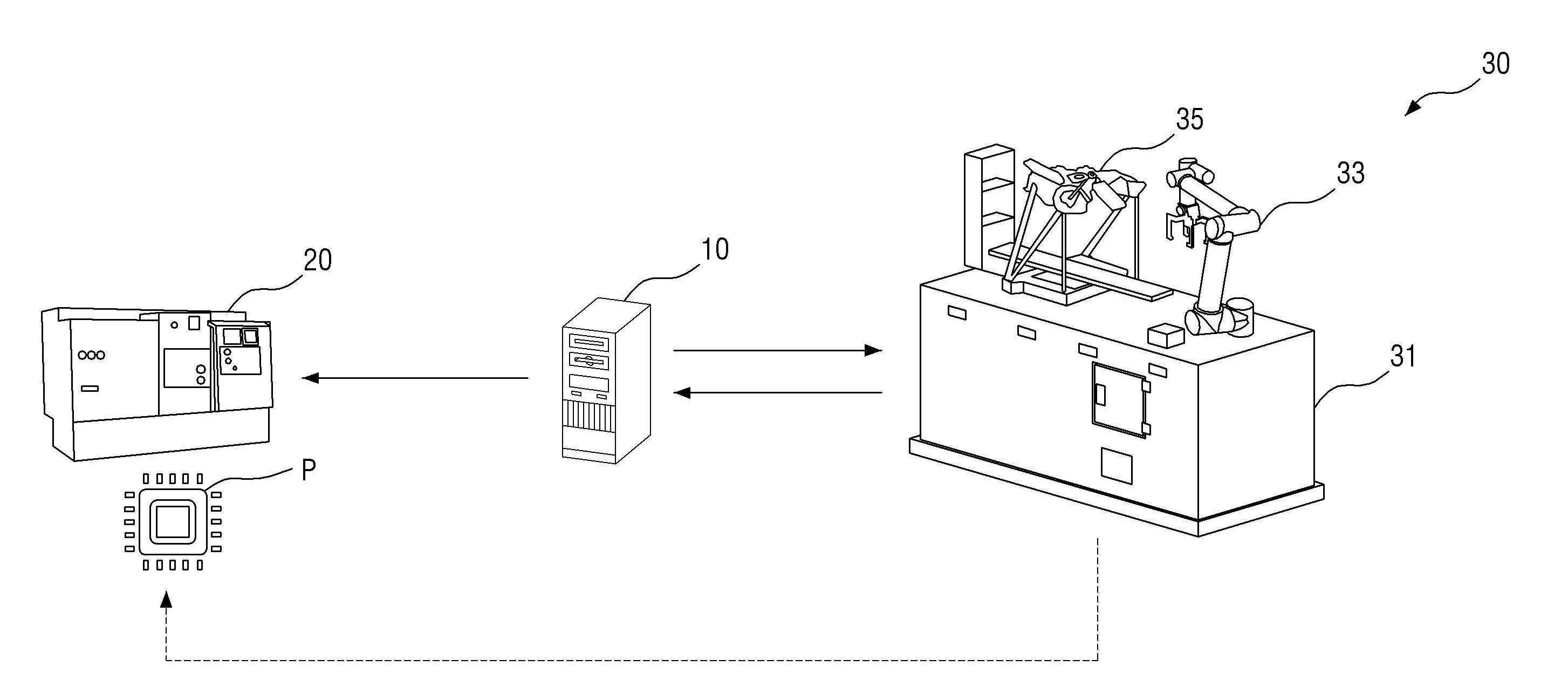
생산된 제품을 자동으로 검사할 수 있는 협업 검사로봇의 제어 방법, 이를 이용한 장치가 제공된다. 본 개시의 몇몇 실시예에 따른 협업 검사로봇의 제어 방법은 생산 설비에 의해 생산된 제품의 불량을 검사하는 제1 협업 검사로봇이 상기 제품을 검사하도록 상기 제1 협업 검사로봇에 대한 작업 이벤트를 생성하는 단계, 상기 생성된 작업 이벤트를 상기 제1 협업 검사로봇으로 송신하는 단계, 상기 제1 협업 검사로봇으로부터 상기 작업 이벤트에 따른 상기 제품의 검사 결과를 수신하는 단계, 상기 제품의 검사 결과를 이용하여 상기 제품의 오차가 허용되는 허용 오차범위를 분석하는 단계, 상기 허용 오차범위를 벗어난 제품을 불량으로 판정하는 단계, 및 상기 불량으로 판정된 제품의 검사 결과를 기초로 상기 생산 설비가 상기 제품을 생산하는 과정의 동작을 보정하는 단계를 포함할 수 있다.
청구항
| 번호 | 청구항 |
|---|---|
| 1 | 컴퓨팅 장치에 의해 수행되는 방법에 있어서,생산 설비에 의해 생산된 제품의 불량을 검사하는 제1 협업 검사로봇이 상기 제품을 검사하도록 제1 작업 이벤트를 생성하여 상기 제1 협업 검사로봇으로 송신하는 단계;상기 제1 협업 검사로봇으로부터 수신되는 상기 제1 작업 이벤트에 따른 상기 제품의 검사 결과가 정상 범위를 벗어나는 경우, 기 설정된 제2 협업 검사로봇으로 상기 제1 협업 검사로봇 및 상기 제품을 검사하도록 제2 작업 이벤트를 생성하여 송신하는 단계; 및상기 제2 협업 검사로봇으로부터 상기 제2 작업 이벤트에 따른 상기 제1 협업 검사로봇의 오작동 여부 및 상기 제품의 불량 여부에 관한 정보를 수신하는 단계를 포함하는, 협업 검사로봇의 제어 방법. |