한국항공우주산업(주)
협동 로봇을 이용한 항공기 부품의 드릴링 방법
Drilling method for aircraft parts using collaborative robots
특허 요약
본 발명은 협동 로봇을 이용한 항공기 부품의 드릴링 방법에 관한 것으로, 비전 장치를 이용하여 피가공물에 배치된 치공구에 형성된 복수 개의 가공 홀을 인식하고, 드릴 장치를 파지한 협동 로봇을 이용하여 해당 가공 홀을 통해 피가공물에 드릴링을 수행함으로써, 피가공물의 협소한 내부 공간에 용이하게 접근이 가능하고, 안정적인 드릴링 작업을 수행할 수 있는 것을 특징으로 한다.
청구항
| 번호 | 청구항 |
|---|---|
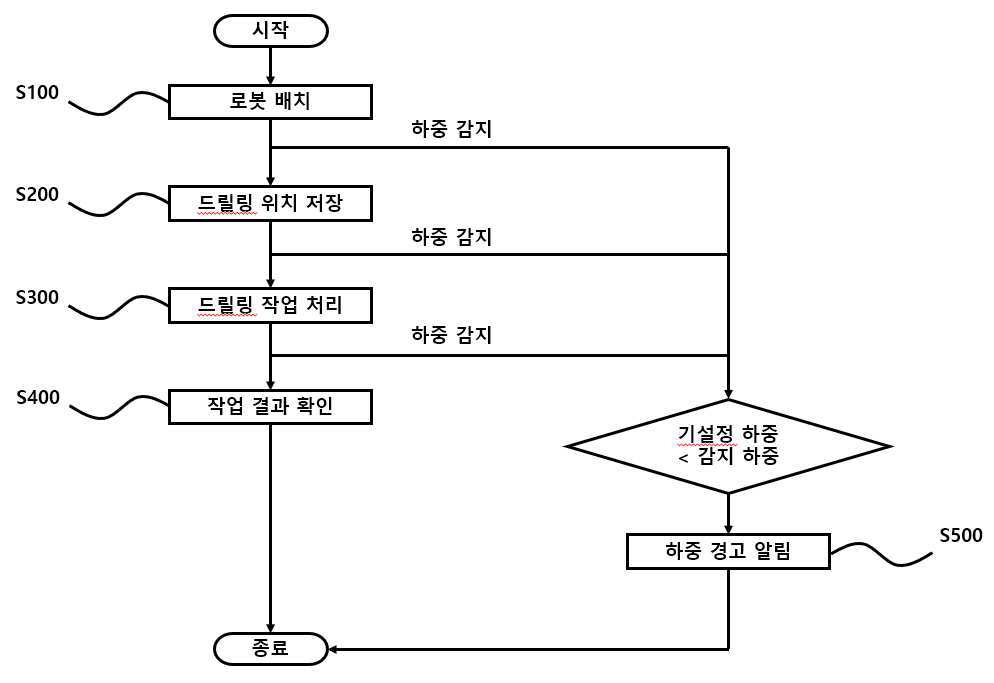
| 1 | 협동 로봇을 이용한 항공기 부품의 드릴링 방법에 있어서,상기 협동 로봇으로 드릴 장치를 파지한 후, 상기 협동 로봇의 일측에 결합된 구동 장치 및 몸체부의 일측에 배치된 레이저 장치를 이용하여 상기 협동 로봇의 위치를 조절하여 고정하는 로봇 배치 단계;상기 드릴 장치의 일측에 배치된 비전 장치를 이용하여 피가공물에 배치된 치공구에 형성된 복수 개의 가공 홀을 인식하고, 상기 가공 홀의 위치로 상기 드릴 장치를 이동하여, 상기 드릴 장치의 위치 정보를 데이터베이스부에 저장하는 드릴링 위치 저장 단계; 및상기 데이터베이스부에 저장된 상기 드릴 장치의 위치 정보에 기초하여 상기 가공 홀을 통해 상기 피가공물에 드릴링을 수행하는 드릴링 작업 처리 단계;를 포함하는, 협동 로봇을 이용한 항공기 부품의 드릴링 방법. |