| 번호 | 청구항 |
|---|---|
| 1 | 적어도 하나의 센서;차량의 작동을 제어하는 컨트롤러; 및상기 적어도 하나의 센서 및 상기 컨트롤러와 연결되는 프로세서를 포함하며,상기 프로세서는, 차량의 상태 정보 및/또는 주변 환경 정보를 모니터링하고, 상기 상태 정보 및/또는 주변 환경 정보에 기초하여 자율 주행 가능 여부를 판단하고, 자율 주행이 가능하지 않은 상황이면 최소 위험 조작을 수행하고, 상기 최소 위험 조작에도 불구하고 위험 거동이 예측되면, 차량의 좌/우측의 제동력에 편차를 주는 편제동을 추가로 이용하여 상기 최소 위험 조작을 수행하는, 차량. |
| 2 | 제1항에 있어서,상기 프로세서는,직선 정차 유형에 따라 상기 최소 위험 조작을 수행하고, 상기 차량이 곡선 도로를 주행하고 있는 상황을 상기 위험 거동으로 예측하는, 차량. |
| 3 | 제2항에 있어서,상기 프로세서는,횡방향 제어가 부분적으로 또는 전체적으로 동작하지 아니하여 직선 정차 유형에 따라 상기 최소 위험 조작을 수행하고, 상기 차량이 곡선 도로를 주행하고 있는 상황을 상기 위험 거동으로 예측하는, 차량. |
| 4 | 제2항에 있어서,상기 프로세서는,추가적으로 차선 이탈, 가드레일 충돌 또는 타차량과의 충돌 위험이 있다고 예측하는 상황을 상기 위험 거동으로 예측하는, 차량. |
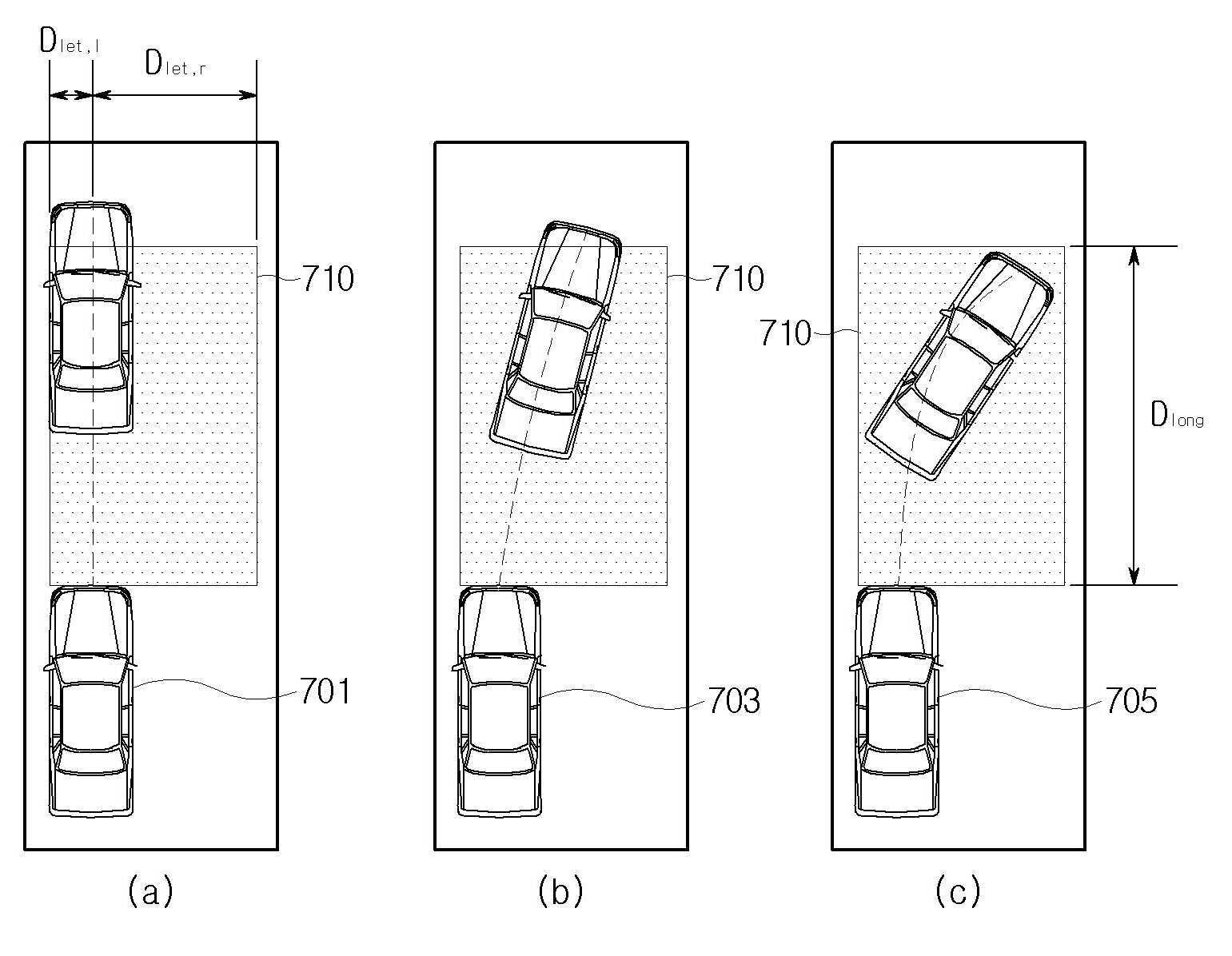
| 5 | 제1항에 있어서,상기 프로세서는,직선 정차 유형에 따라 상기 최소 위험 조작을 수행할 것을 선택한 경우, 최소 위험 조작 허용 공간을 종방향 허용 거리 및 횡방향 허용 거리에 의하여 설정하되,정차 가능 거리, 충돌 위험 거리 및/또는 차선 이탈 거리를 예측하고, 예측한 상기 정차 가능 거리, 상기 충돌 위험 거리 및 상기 차선 이탈 거리 중에서 가장 작은 거리를 상기 종방향 허용 거리로 결정하고, 상기 횡방향 허용 거리는 (옆 차선 폭(W)-옆 차선 주행 차량의 차폭(Wv)-0.75m)으로 계산되는 값과 최대 침범 허용 범위 중에서 작은 값으로 결정하는, 차량. |
| 6 | 제5항에 있어서,상기 프로세서는,상기 종방향 허용 거리가 상기 정차 가능 거리보다 짧은 경우, 상기 위험 거동으로 예측하는, 차량. |
| 7 | 제6항에 있어서,상기 프로세서는, 상기 위험 거동이 예측된 경우,적어도 하나의 제동력의 편차에 기초하여 적어도 하나의 주행 궤적을 예측하고,예측한 상기 적어도 하나의 주행 궤적이 상기 허용 공간 내에 차량이 정차되도록 하는 지 판단하여 차량에 인가할 제동력의 편차를 결정하는, 차량. |
| 8 | 제7항에 있어서,상기 프로세서는,상기 편제동에 의하여 차량이 회전함에 따라 상기 허용 공간을 갱신하고,갱신한 허용 공간에 기초하여 상기 제동력의 편차를 다시 결정하는, 차량. |
| 9 | 제7항에 있어서,상기 프로세서는,시뮬레이션 또는 실제 테스트에 의하여 획득한 제동력 편차에 따른 주행 궤적 정보를 이용하여 강화학습을 수행한 인공지능을 사용하여 차량에 인가할 제동력의 편차를 결정하는, 차량. |
| 10 | 제9항에 있어서,상기 프로세서는,상기 인공지능의 판단을 위한 입력으로 차량의 속도, 설정된 상기 허용 공간, 및 현재 주행하는 차로의 곡률 정보를 제공하는, 차량. |
| 11 | 차량의 동작 방법에 있어서,차량의 상태 정보 및/또는 주변 환경 정보를 모니터링하는 동작;상기 상태 정보 및/또는 주변 환경 정보에 기초하여 자율 주행 가능 여부를 판단하는 동작; 자율 주행이 가능하지 않은 상황이면 최소 위험 조작을 수행하는 동작; 및위험 거동을 예측하는 동작을 포함하고, 상기 최소 위험 조작을 수행하는 동작은,상기 위험 거동이 예측되면, 차량의 좌/우측의 제동력에 편차를 주는 편제동을 추가로 이용하여 상기 최소 위험 조작을 수행하는 동작을 포함하는, 차량의 동작 방법. |
| 12 | 제11항에 있어서,상기 위험 거동을 예측하는 동작은,직선 정차 유형에 따라 상기 최소 위험 조작이 수행되고, 상기 차량이 곡선 도로를 주행하고 있는 상황을 상기 위험 거동으로 예측하는 동작을 포함하는, 차량의 동작 방법. |
| 13 | 제12항에 있어서,상기 위험 거동을 예측하는 동작은,횡방향 제어가 부분적으로 또는 전체적으로 동작하지 아니함에 따라 직선 정차 유형에 따라 상기 최소 위험 조작이 수행되고, 상기 차량이 곡선 도로를 주행하고 있는 상황을 상기 위험 거동으로 예측하는 동작을 포함하는, 차량의 동작 방법. |
| 14 | 제12항에 있어서,상기 위험 거동을 예측하는 동작은,직선 정차 유형에 따라 상기 최소 위험 조작이 수행되고, 상기 차량이 곡선 도로를 주행하고 있는 상황에서 차선 이탈, 가드레일 충돌 또는 타차량과의 충돌 위험이 있으면 상기 위험 거동으로 예측하는 동작을 포함하는, 차량의 동작 방법. |
| 15 | 제11항에 있어서,상기 최소 위험 조작을 수행하는 동작은, 최소 위험 조작 허용 공간을 설정하는 동작을 더 포함하고,상기 최소 위험 조작 허용 공간을 설정하는 동작은,정차 가능 거리, 충돌 위험 거리 및/또는 차선 이탈 거리를 예측하고, 예측한 상기 정차 가능 거리, 상기 충돌 위험 거리 및/또는 상기 차선 이탈 거리 중에서 가장 작은 거리를 종방향 허용 거리로 결정하는 동작;(옆 차선 폭(W)-옆 차선 주행 차량의 차폭(Wv)-0.75m)으로 계산되는 값과 최대 침범 허용 범위 중에서 작은 값으로 횡방향 허용 거리를 결정하는 동작; 및상기 종방향 허용 거리 및 상기 횡방향 허용 거리에 기초하여 상기 최소 위험 조작 허용 공간을 설정하는 동작을 포함하는, 차량의 동작 방법. |
| 16 | 제15항에 있어서,상기 위험 거동을 예측하는 동작은,상기 종방향 허용 거리가 상기 정차 가능 거리보다 짧은 경우, 상기 위험 거동으로 예측하는 동작을 포함하는, 차량의 동작 방법. |
| 17 | 제16항에 있어서,상기 위험 거동이 예측되면, 차량의 좌/우측의 제동력에 편차를 주는 편제동을 추가로 이용하여 상기 최소 위험 조작을 수행하는 동작은,적어도 하나의 제동력의 편차에 기초하여 적어도 하나의 주행 궤적을 예측하는 동작; 및예측한 상기 적어도 하나의 주행 궤적이 상기 최소 위험 조작 허용 공간 내에 차량이 정차되도록 하는 지 판단하여 차량에 인가할 제동력의 편차를 결정하는 동작을 포함하는, 차량의 동작 방법. |
| 18 | 제17항에 있어서,상기 위험 거동이 예측되면, 차량의 좌/우측의 제동력에 편차를 주는 편제동을 추가로 이용하여 상기 최소 위험 조작을 수행하는 동작은,상기 편제동에 의하여 차량이 회전함에 따라 상기 허용 공간을 갱신하는 동작; 및 갱신한 허용 공간에 기초하여 상기 제동력의 편차를 다시 결정하는 동작을 더 포함하는, 차량의 동작 방법. |
| 19 | 제17항에 있어서,상기 차량에 인가할 제동력의 편차를 결정하는 동작은,시뮬레이션 또는 실제 테스트에 의하여 획득한 제동력 편차에 따른 주행 궤적 정보를 이용하여 강화학습을 수행한 인공지능을 사용하여 차량에 인가할 제동력의 편차를 결정하는 동작을 포함하는, 차량의 동작 방법. |
| 20 | 제19항에 있어서상기 차량에 인가할 제동력의 편차를 결정하는 동작은,상기 인공지능의 판단을 위한 입력으로 차량의 속도, 설정된 상기 허용 공간, 및 현재 주행하는 차로의 곡률 정보를 제공하는 동작을 더 포함하는, 차량의 동작 방법. |