| 번호 | 청구항 |
|---|---|
| 1 | 차량의 주변 정보를 획득하는 센서부; 및상기 센서부가 획득한 주변 정보를 바탕으로, 차량 외부의 객체를 추적하는 프로세서;를 포함하고,상기 프로세서는상기 주변 정보를 바탕으로 격자 지도를 생성하고,상기 격자 지도를 딥러닝하여 분류 객체를 획득하며,상기 격자 지도에서 점유 격자를 검출하고, 상기 점유 격자의 군집화를 바탕으로 격자 객체를 획득하며,상기 분류 객체와 상기 격자 객체를 융합하여 객체를 추적하는 것을 특징으로 하는 객체 추적 장치. |
| 2 | 제 1 항에 있어서,상기 프로세서는탑-뷰 이미지 형식으로 상기 격자 지도를 생성하는 것을 특징으로 하는 객체 추적 장치. |
| 3 | 제 1 항에 있어서,상기 프로세서는상기 격자 지도에서 객체 추적 영역을 한정하는 관심 영역을 설정하는 것을 특징으로 하는 객체 추적 장치. |
| 4 | 제 1 항에 있어서,상기 프로세서는상기 분류 객체를 둘러싸는 바운딩 박스, 상기 바운딩 박스에 매칭되는 클래스, 및 상기 분류 객체의 속도 정보를 획득하는 것을 특징으로 하는 객체 추적 장치. |
| 5 | 제 1 항에 있어서,상기 프로세서는상기 격자 지도의 격자들 각각에 객체가 존재할 점유 확률을 바탕으로 점유 격자를 추출하고,상기 점유 격자와 인접한 하나 이상의 주변 격자를 추출하며,상기 점유 격자 및 상기 주변 격자를 포함하는 상기 격자 객체를 획득하는 것을 특징으로 하는 객체 추적 장치. |
| 6 | 제 5 항에 있어서,상기 프로세서는상기 격자 객체에 속하는 격자들 각각의 속도를 바탕으로, 상기 격자 객체를 둘 이상의 서로 다른 격자 객체들로 구분하는 것을 특징으로 하는 객체 추적 장치. |
| 7 | 제 1 항에 있어서,상기 프로세서는제1 프레임에서 상기 격자 객체 내부에서 추격점을 결정하고, 상기 추격점의 이동 상태의 예측점을 중심으로 유효범위를 설정하며,제1 프레임 이후 획득된 제2 프레임에서 측정된 상기 추격점이 상기 유효범위 이내에 위치하는지를 판단하여, 상기 격자 객체의 추적을 진행하는 것을 특징으로 하는 객체 추적 장치. |
| 8 | 제 1 항에 있어서,상기 프로세서는상기 격자 객체가 차지하는 군집 영역을 계산하고,상기 바운딩 박스의 영역과 상기 군집 영역 간의 중첩 영역을 계산하며,상기 군집 영역에 대비한 상기 중첩 영역의 크기가 미리 설정된 임계값 이상인 것을 바탕으로, 상기 분류 객체와 상기 격자 객체를 동일한 객체로 판단하는 것을 특징으로 하는 객체 추적 장치. 객체 추적 장치. |
| 9 | 제 8 항에 있어서,상기 프로세서는상기 프로세서는볼록 껍질 알고리즘을 이용하여 상기 격자 객체를 둘러싸는 볼록 껍질을 획득하고,상기 볼록 껍질 내부 영역을 상기 군집 영역으로 결정하는 것을 특징으로 하는 객체 추적 장치. |
| 10 | 제 8 항에 있어서,상기 프로세서는상기 바운딩 박스와 상기 볼록 껍질이 교차하는 하나 이상의 교차 포인트를 획득하고,상기 볼록 껍질에 포함되는 경계 포인트들 중에서 상기 바운딩 박스 내부에 위치하는 하나 이상의 제1 내부 포인트를 획득하며,상기 바운딩 박스의 꼭지점에 해당하는 격자들 중에서 상기 볼록 껍질 내부에 위치한 하나 이상의 제2 내부 포인트를 획득하고,상기 교차 포인트, 상기 제1 내부 포인트, 및 상기 제2 내부 포인트를 잇는 영역을 상기 중첩 영역으로 결정하는 것을 특징으로 하는 객체 추적 장치. |
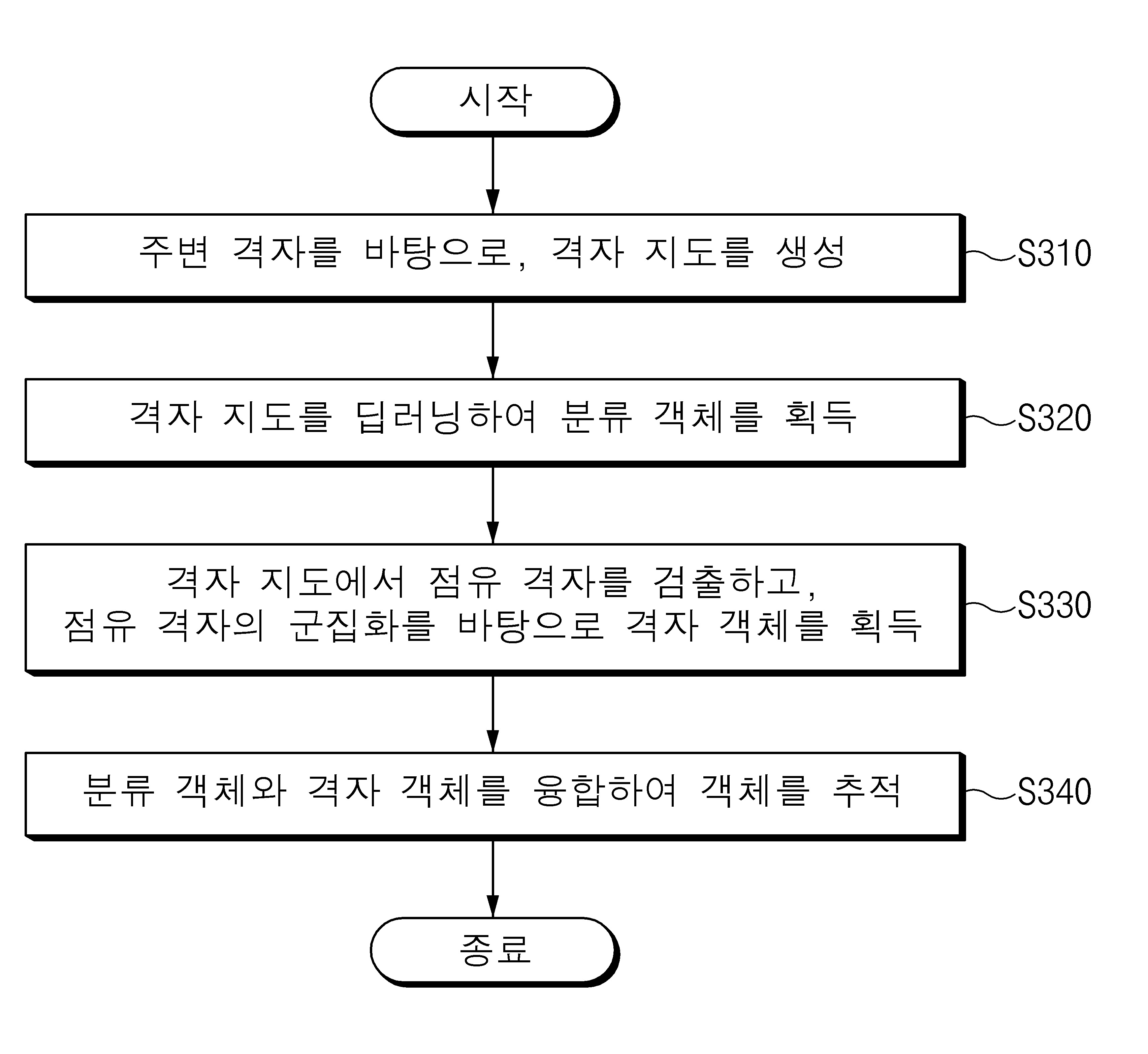
| 11 | 차량 외부의 주변 정보를 바탕으로 격자 지도를 생성하는 단계;상기 격자 지도를 딥러닝하여 분류 객체를 획득하는 단계;상기 격자 지도에서 점유 격자를 검출하고, 상기 점유 격자의 군집화를 바탕으로 격자 객체를 획득하는 단계; 및상기 분류 객체와 상기 격자 객체를 융합하여 객체를 추적하는 단계;를 포함하는 객체 추적 방법. |
| 12 | 제 11 항에 있어서,상기 격자 지도를 생성하는 단계는탑-뷰 이미지 형식으로 상기 격자 지도를 생성하는 것을 특징으로 하는 객체 추적 방법. |
| 13 | 제 11 항에 있어서,상기 주변 정보를 상기 격자 지도로 변환하는 단계는객체 추적 영역을 한정하는 관심 영역을 설정하는 단계를 더 포함하는 것을 특징으로 하는 객체 추적 방법. |
| 14 | 제 11 항에 있어서,상기 분류 객체를 획득하는 단계는상기 분류 객체를 둘러싸는 바운딩 박스를 획득하는 단계; 상기 바운딩 박스에 매칭되는 클래스를 획득하는 단계; 및상기 분류 객체의 속도 정보를 획득하는 단계;를 포함하는 것을 특징으로 하는 객체 추적 방법. |
| 15 | 제 11 항에 있어서,상기 격자 객체를 획득하는 단계는상기 격자 지도의 격자들 각각에 객체가 존재할 점유 확률을 바탕으로 점유 격자를 추출하는 단계;상기 점유 격자와 인접한 하나 이상의 주변 격자를 추출하는 단계; 및상기 점유 격자 및 상기 주변 격자를 포함하는 상기 격자 객체를 획득하는 단계;를 포함하는 것을 특징으로 하는 객체 추적 방법. |
| 16 | 제 15 항에 있어서,상기 격자 객체를 획득하는 단계는상기 격자 객체에 포함되는 격자들 각각의 속도를 바탕으로 상기 격자 객체를 둘 이상의 서로 다른 격자 객체들로 구분하는 단계;를 더 포함하는 것을 특징으로 하는 객체 추적 방법. |
| 17 | 제 11 항에 있어서, 상기 격자 객체를 획득하는 단계는제1 프레임에서 상기 격자 객체 내부에서 추격점을 결정하는 단계;상기 추격점의 이동 상태의 예측점을 중심으로 유효범위를 설정하는 단계;제1 프레임 이후 획득된 제2 프레임에서 측정된 상기 추격점이 상기 유효범위 이내에 위치하는지를 판단하여, 상기 격자 객체의 추적을 진행하는 단계;를 더 포함하는 것을 특징으로 하는 객체 추적 방법. |
| 18 | 제 11 항에 있어서,상기 분류 객체와 상기 격자 객체를 융합하여 객체를 추적하는 단계는상기 격자 객체가 차지하는 군집 영역을 계산하는 단계;상기 바운딩 박스의 영역과 상기 군집 영역 간의 중첩 영역을 계산하는 단계; 및상기 군집 영역에 대비한 상기 중첩 영역의 크기가 미리 설정된 임계값 이상인 것을 바탕으로, 상기 분류 객체와 상기 격자 객체를 동일한 객체로 판단하는 단계;를 포함하는 것을 특징으로 하는 객체 추적 방법. |
| 19 | 제 18 항에 있어서,상기 군집 영역을 계산하는 단계는볼록 껍질 알고리즘을 이용하여 상기 격자 객체를 둘러싸는 볼록 껍질을 획득하는 단계;상기 볼록 껍질 내부 영역을 상기 군집 영역으로 결정하는 단계;를 포함하는 것을 특징으로 하는 객체 추적 방법. |
| 20 | 제 18 항에 있어서,상기 분류 객체와 상기 격자 객체를 융합하여 객체를 추적하는 단계는상기 바운딩 박스와 상기 볼록 껍질이 교차하는 하나 이상의 교차 포인트를 획득하는 단계;상기 볼록 껍질에 포함되는 경계 포인트들 중에서 상기 바운딩 박스 내부에 위치하는 하나 이상의 제1 내부 포인트를 획득하는 단계;상기 바운딩 박스의 꼭지점에 해당하는 격자들 중에서 상기 볼록 껍질 내부에 위치한 하나 이상의 제2 내부 포인트를 획득하는 단계; 및상기 교차 포인트, 상기 제1 내부 포인트, 및 상기 제2 내부 포인트를 잇는 영역을 상기 중첩 영역으로 결정하는 단계;를 포함하는 것을 특징으로 하는 객체 추적 방법. |