| 번호 | 청구항 |
|---|---|
| 1 | 적어도 하나의 프로세서에 의해 수행되는 고장 진단 방법에 있어서, 소음이 발생하는 소음점으로부터 제1 시점에 측정된 진동 신호를 주파수 영역으로 변환하여 소음점 데이터를 생성하고, 상기 소음을 감지하는 수음점으로부터 상기 제1 시점에 측정된 진동 신호를 주파수 영역으로 변환한 수음점 데이터를 생성하는 단계; 상기 소음점 데이터 및 상기 수음점 데이터에 기초하여 딥러닝을 통해 상기 수음점의 진동을 나타내는 주파수 데이터로부터 상기 소음점의 진동을 나타내는 주파수 데이터를 생성하는 소음 예측 모델을 생성하는 단계;상기 수음점으로부터 제2 시점에 측정된 대상 진동 신호를 획득하는 단계;학습된 상기 소음 예측 모델을 통해 상기 대상 진동 신호를 주파수 영역으로 변환한 대상 수음점 데이터로부터 소음점에서의 진동을 나타내는 대상 소음점 데이터를 예측하는 단계; 및상기 대상 소음점 데이터에 기초하여 상기 소음점의 고장을 진단하는 단계를 포함하는 고장 진단 방법. |
| 2 | 제1항에 있어서, 상기 소음점과 상기 수음점 사이의 적어도 하나의 서브포인트로부터 획득한 진동 신호를 주파수 영역으로 변환한 서브포인트 데이터를 생성하는 단계;를 더 포함하고, 상기 소음 예측 모델을 생성하는 단계는, 상기 소음점 데이터 및 상기 서브포인트 데이터에 기초하여 상기 수음점의 진동을 나타내는 주파수 데이터로부터 상기 서브포인트 데이터의 진동을 나타내는 주파수 데이터를 생성하는 제1 모델을 학습시키는 단계; 및상기 서브포인트 데이터 및 상기 수음점 데이터에 기초하여 상기 서브포인트의 진동을 나타내는 주파수 데이터로부터 상기 소음점의 진동을 나타내는 주파수 데이터를 생성하는 제2 모델을 학습시키는 단계를 포함하는, 고장 진단 방법. |
| 3 | 제2항에 있어서, 상기 소음 예측 모델은 복수의 연산 블록 및 적어도 하나의 완전 연결 블록을 포함하고, 상기 복수의 연산 블록 각각에는 커널이 적용되며, 상기 소음 예측 모델을 생성하는 단계는, 상기 커널의 가중치 및 바이어스를 결정하는 단계를 더 포함하는, 고장 진단 방법. |
| 4 | 제3항에 있어서, 상기 소음 예측 모델을 생성하는 단계는, 상기 대상 수음점 데이터를 상기 소음 예측 모델에 입력하여 예측한 예측 값과 상기 대상 수음점 신호에 대응하는 소음점 데이터 간의 차이를 수치화하여 손실 함수 값을 계산하는 단계; 및상기 손실 함수 값이 최소가 되도록 상기 복수의 연산 블록을 학습시키는 단계를 더 포함하는, 고장 진단 방법. |
| 5 | 제1항에 있어서, 학습 데이터셋 및 테스트 데이터셋에 기초하여 딥러닝을 통해 상기 소음점의 진동을 나타내는 주파수 데이터로부터 상기 소음점의 고장 여부를 예측하는 고장 진단 모델을 생성하는 단계를 더 포함하는, 고장 진단 방법. |
| 6 | 제5항에 있어서, 상기 학습 데이터셋 및 상기 테스트 데이터셋 각각은, 상기 소음점 데이터에 대응하여 상기 소음점의 고장 유무를 포함하는 고장 정보가 라벨링된 데이터를 포함하고, 상기 고장 진단 모델을 생성하는 단계는, 상기 학습 데이터셋에 기초하여 상기 고장 진단 모델을 학습하는 단계; 및 상기 테스트 데이터셋에 기초하여 상기 고장 진단 모델을 테스트하는 단계를 포함하는, 고장 진단 방법. |
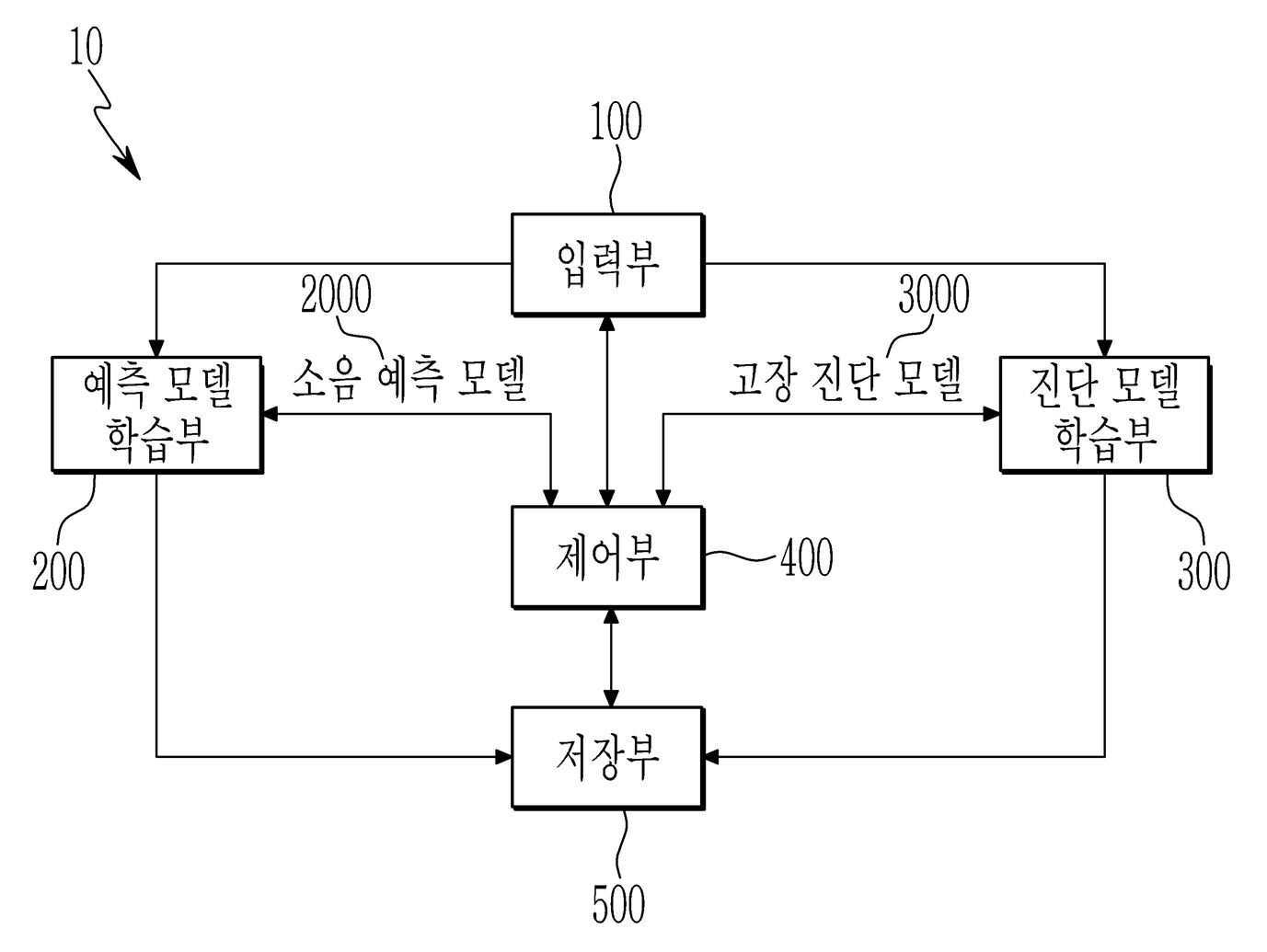
| 7 | 소음이 발생하는 소음점 및 상기 소음을 감지하는 수음점으로부터 제1 시점에 측정된 진동 신호를 획득하고, 상기 수음점으로부터 제2 시점에 측정된 대상 진동 신호를 획득하는 입력부;딥러닝을 통해 상기 수음점의 진동을 나타내는 주파수 데이터로부터 상기 소음점의 진동을 나타내는 주파수 데이터를 생성하는 소음 예측 모델을 생성하여 학습하는 예측 모델 학습부; 및 상기 소음점으로부터 상기 제1 시점에 측정된 진동 신호를 주파수 영역으로 변환한 소음점 데이터 및 상기 수음점으로부터 상기 제1 시점에 측정된 진동 신호를 주파수 영역으로 변환한 수음점 데이터를 상기 예측 모델 학습부에 제공하고, 학습된 상기 소음 예측 모델을 수신하며, 상기 학습된 소음 예측 모델을 통해 상기 대상 진동 신호를 주파수 영역으로 변환한 대상 수음점 데이터로부터 상기 제2 시점의 상기 소음점에서의 진동을 나타내는 대상 소음점 데이터를 예측하고, 상기 대상 소음점 데이터에 기초하여 상기 소음점의 고장을 진단하는 하는 제어부를 포함하는 고장 진단 시스템. |
| 8 | 제7항에 있어서, 상기 입력부는, 상기 소음점과 상기 수음점 사이의 적어도 하나의 서브포인트로부터 상기 제1 시점에 측정된 진동 신호를 획득하고,상기 제어부는, 상기 적어도 하나의 서브포인트로부터 획득한 진동 신호를 주파수 영역으로 변환한 서브포인트 데이터를 생성하며, 상기 소음 예측 모델은, 상기 소음점 데이터 및 상기 서브포인트 데이터에 기초하여 상기 수음점의 진동을 나타내는 주파수 데이터로부터 상기 서브포인트 데이터의 진동을 나타내는 주파수 데이터를 생성하는 제1 모델; 및상기 서브포인트 데이터 및 상기 수음점 데이터에 기초하여 상기 서브포인트의 진동을 나타내는 주파수 데이터로부터 상기 소음점의 진동을 나타내는 주파수 데이터를 생성하는 제2 모델을 포함하는,고장 진단 시스템. |
| 9 | 제8항에 있어서, 상기 소음 예측 모델은 복수의 연산 블록 및 적어도 하나의 완전 연결 블록을 포함하고, 상기 복수의 연산 블록 각각에는 커널이 적용되며, 상기 예측 모델 학습부는, 딥러닝을 통해 상기 커널의 가중치 및 바이어스를 결정하는, 고장 진단 시스템. |
| 10 | 제9항에 있어서, 상기 예측 모델 학습부는, 상기 대상 수음점 데이터를 상기 소음 예측 모델에 입력하여 예측한 예측 값과 상기 대상 수음점 신호에 대응하는 소음점 데이터 간의 차이를 수치화하여 손실 함수 값을 계산하고, 상기 손실 함수 값이 최소가 되도록 상기 복수의 연산 블록을 학습시키는, 고장 진단 시스템. |
| 11 | 제7항에 있어서, 학습 데이터셋 및 테스트 데이터셋에 기초하여 딥러닝을 통해 상기 소음점의 진동을 나타내는 주파수 데이터로부터 상기 소음점의 고장 여부를 예측하는 고장 진단 모델을 생성하여 학습하는 진단 모델 학습부를 더 포함하는, 고장 진단 시스템. |
| 12 | 제11항에 있어서, 상기 학습 데이터셋 및 테스트 데이터셋은, 상기 소음점 데이터에 대응하여 상기 소음점의 고장 유무를 포함하는 고장 정보가 라벨링된 데이터를 포함하고, 상기 진단 모델 학습부는, 상기 학습 데이터셋에 기초하여 상기 고장 진단 모델을 학습하고, 상기 테스트 데이터셋에 기초하여 상기 고장 진단 모델을 테스트하는, 고장 진단 시스템. |