| 번호 | 청구항 |
|---|---|
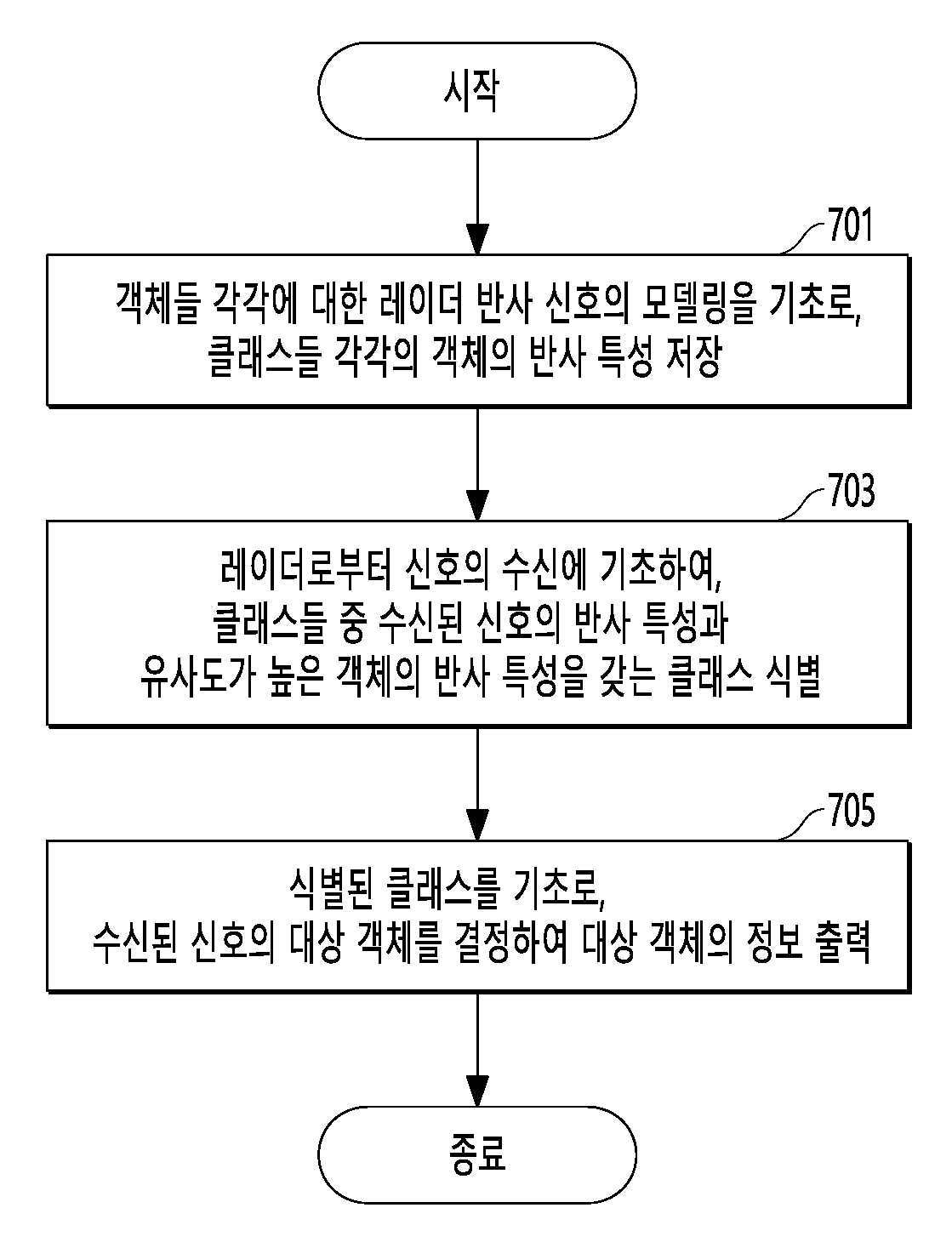
| 1 | 객체들 각각에 대한 레이더 반사 신호의 모델링을 기초로, 상기 객체들을 분류한 클래스들 각각의 객체의 반사 특성을 저장하며;레이더로부터 신호의 수신에 기초하여, 상기 클래스들 중 상기 수신된 신호의 반사 특성과 유사도가 높은 객체의 반사 특성을 갖는 클래스를 식별하며;상기 식별된 클래스를 기초로, 상기 수신된 신호의 대상 객체를 결정하여 상기 대상 객체의 정보를 출력하는 것을 포함하는,객체 식별 방법. |
| 2 | 제 1항에 있어서,상기 객체들 각각에 대한 레이더 반사 신호의 모델링은,상기 레이더 반사 신호의 세기를 혼합 정규 분포로 모델링하는 것을 포함하는,객체 식별 방법. |
| 3 | 제 2항에 있어서,상기 레이더 반사 신호의 세기는,상기 레이더 반사 신호의 고속 퓨리에 변환에 기초하여 생성된 레이더 데이터 큐브로부터 추출된, 상대 거리 및 각도 평면 상의 레이더 반사 신호 세기를 포함하는,객체 식별 방법. |
| 4 | 제 1항에 있어서,상기 레이더 반사 신호는,레이더 모의 신호 생성기를 통해 생성된,객체 식별 방법. |
| 5 | 제 1항에 있어서,상기 클래스들은, 이륜차에 해당하는 클래스, 승용차에 해당하는 클래스 또는 상용차에 해당하는 클래스 중 적어도 하나를 포함하는,객체 식별 방법. |
| 6 | 제 5항에 있어서,상기 승용차에 해당하는 클래스 및 상기 상용차에 해당하는 클래스 각각은, 미리 지정된 객체 크기들 각각에 해당하는 클래스를 포함하는,객체 식별 방법. |
| 7 | 제 1항에 있어서,상기 클래스를 식별하는 것은,상기 수신된 신호를, 레이더 반사 특성 모델에 적용하여, 상기 레이더 반사 특성 모델의 지정된 기준 거리에서의 상기 대상 객체의 반사 특성을 획득하며,상기 클래스들 각각의 객체의 반사 특성과 상기 획득된 반사 특성의 유사도를 결정하는 것을 포함하는,객체 식별 방법. |
| 8 | 제 7항에 있어서,상기 레이더로부터, 상기 레이더와 상기 대상 객체 간의 상대 거리 및 관측각을 나타내는 정보를 획득하는 것을 더 포함하며,상기 레이더 반사 특성 모델의 상기 지정된 기준 거리에서의 상기 대상 객체의 반사 특성을 획득하는 것은,상기 수신된 신호를, 상기 레이더 반사 특성 모델에 적용 시, 상기 상대 거리 및 관측각을 나타내는 정보를 상기 레이더 반사 특성 모델에 적용하는 것을 포함하는,객체 식별 방법. |
| 9 | 제 8항에 있어서,상기 레이더 반사 특성 모델의 상기 지정된 기준 거리에서의 상기 대상 객체의 반사 특성을 획득하는 것은,상기 수신된 신호를, 상기 레이더 반사 특성 모델에 적용 시, 상기 레이더의 미리 설정된 레이더 거리 및 각도 해상도를 상기 레이더 반사 특성 모델에 더 적용하는 것을 포함하는,객체 식별 방법. |
| 10 | 제 7항에 있어서,상기 레이더로부터, 상기 객체의 위치 정보를 식별할 수 있는 탐지 정보를 획득하는 것을 더 포함하며,상기 유사도를 결정하는 것은,상기 획득된 탐지 정보를 기초로 수행되는,객체 식별 방법. |
| 11 | 제 10항에 있어서,상기 유사도를 결정하는 것은,상기 획득된 반사 특성의 가중치, 평균 및 분산과, 상기 획득된 탐지 정보를, 혼합 정규 분포 모델에 적용하여, 상기 획득된 반사 특성의 상기 클래스들 각각과의 유사도를 결정하는 것을 포함하는,객체 식별 방법. |
| 12 | 제 11항에 있어서,상기 클래스들의 개수를 기초로, 상기 획득된 반사 특성의 상기 클래스들 각각과의 유사도의 정규화를 수행하여, 상기 클래스들 각각의 기준 유사도를 결정하는 것을 더 포함하는,객체 식별 방법. |
| 13 | 제 12항에 있어서,상기 클래스들 중 상기 수신된 신호의 반사 특성과 유사도가 높은 객체의 반사 특성을 갖는 클래스를 식별하는 것은,상기 클래스들 중 상기 기준 유사도가 임계 값을 초과하는 클래스를 식별하며,상기 기준 유사도가 임계 값을 초과하는 클래스 중 가장 높은 유사도를 갖는 클래스를 상기 수신된 신호의 반사 특성과 유사도가 높은 객체의 반사 특성을 갖는 클래스로 식별하는 것을 포함하는,객체 식별 방법. |
| 14 | 객체들 각각에 대한 레이더 반사 신호의 모델링을 기초로, 상기 객체들을 분류한 클래스들 각각의 객체의 반사 특성을 저장하는 메모리; 및레이더로부터 신호의 수신에 기초하여, 상기 메모리의 상기 클래스들 중 상기 수신된 신호의 반사 특성과 유사도가 높은 객체의 반사 특성을 갖는 클래스를 식별하며, 상기 식별된 클래스를 기초로, 상기 수신된 신호의 대상 객체를 결정하여 상기 대상 객체의 정보를 출력하는 프로세서를 포함하는,객체 식별 장치. |
| 15 | 제 14항에 있어서,상기 프로세서는,상기 레이더 반사 신호의 세기를 혼합 정규 분포로 모델링하여, 상기 객체들 각각에 대한 레이더 반사 신호의 모델링하는 것을 포함하는,객체 식별 장치. |
| 16 | 제 15항에 있어서,상기 레이더 반사 신호의 세기는,상기 레이더 반사 신호의 고속 퓨리에 변환에 기초하여 생성된 레이더 데이터 큐브로부터 추출된, 상대 거리 및 각도 평면 상의 레이더 반사 신호 세기를 포함하는,객체 식별 장치. |
| 17 | 제 14항에 있어서,상기 레이더 반사 신호는,레이더 모의 신호 생성기를 통해 생성된,객체 식별 장치. |
| 18 | 제 14항에 있어서,상기 클래스들은, 이륜차에 해당하는 클래스, 승용차에 해당하는 클래스 또는 상용차에 해당하는 클래스 중 적어도 하나를 포함하는,객체 식별 장치. |
| 19 | 제 14항에 있어서,상기 프로세서는,상기 수신된 신호를, 레이더 반사 특성 모델에 적용하여, 상기 레이더 반사 특성 모델의 지정된 기준 거리에서의 상기 대상 객체의 반사 특성을 획득하며,상기 클래스들 각각의 객체의 반사 특성과 상기 획득된 반사 특성의 유사도를 결정하는 것을 포함하는,객체 식별 장치. |
| 20 | 제 19항에 있어서,상기 프로세서는,상기 레이더로부터, 상기 레이더와 상기 대상 객체 간의 상대 거리 및 관측각을 나타내는 정보를 획득하며,상기 수신된 신호를, 상기 레이더 반사 특성 모델에 적용 시, 상기 상대 거리 및 관측각을 나타내는 정보와, 상기 레이더의 미리 설정된 레이더 거리 및 각도 해상도를 상기 레이더 반사 특성 모델에 더 적용하는 것을 포함하는,객체 식별 장치. |