| 번호 | 청구항 |
|---|---|
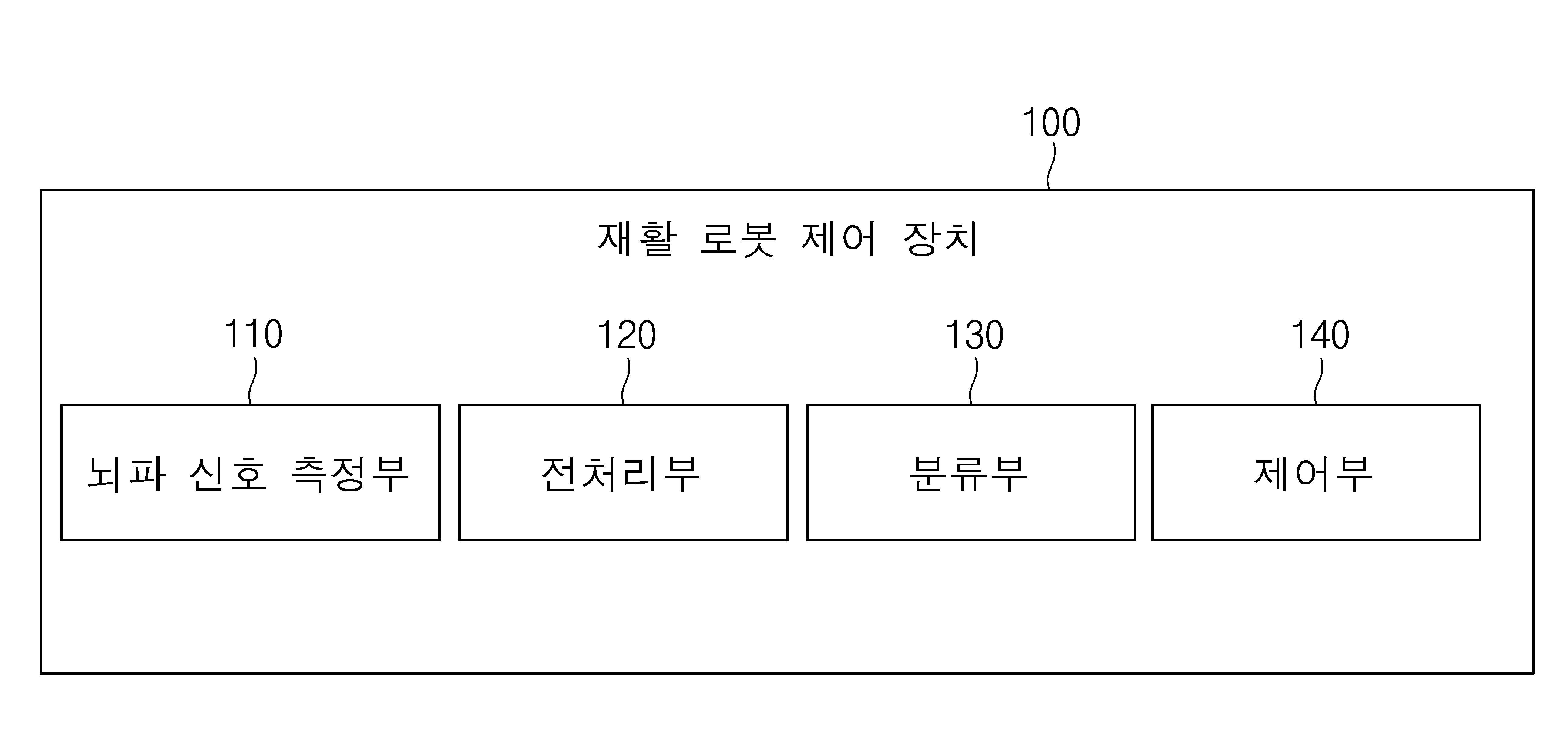
| 1 | 사용자의 뇌파 신호를 측정하는 뇌파 신호 측정부;측정된 상기 뇌파 신호를 전처리하는 전처리부;상기 전처리부에서 전처리된 상기 뇌파 신호를 기반으로 상기 사용자의 운동 의도를 분류하는 분류부; 및사용자의 운동 의도를 실시간으로 반영하여 재활 로봇의 동작 또는 정지를 제어하는 제어부를 포함하는 재활 로봇 제어 장치. |
| 2 | 제 1 항에 있어서,상기 분류부는,CNN(Convolutional Neural Network), RNN(Recurrent Neural Network) 또는 LSTM(Long Short Term Memory) 기반의 딥러닝 모델 또는 LDA(Linear Discriminant Analysis) 또는 SVM(Support Vector Machine) 기반의 머신 러닝 모델을 이용하여 상기 사용자의 운동 의도를 분류하는 재활 로봇 제어 장치. |
| 3 | 제 1 항에 있어서,상기 분류부는,상기 재활 로봇의 동작 중 상기 사용자의 운동 의도를 분류하는 제 1 디코더 및 상기 재활 로봇의 정지 중 상기 사용자의 운동 의도를 분류하는 제 2 디코더 를 포함하는 재활 로봇 제어 장치. |
| 4 | 제 1 항에 있어서,상기 사용자의 운동 의도에 대한 실시간 분류 상태를 표시하는 디스플레이부를 더 포함하는 재활 로봇 제어 장치. |
| 5 | 제 3 항에 있어서,상기 분류부는,상기 재활 로봇이 동작 상태에서 정지 상태로 변하는 경우, 상기 제 1 디코더에 저장된 버퍼 데이터를 삭제하고,상기 재활 로봇이 정지 상태에서 동작 상태로 변하는 경우, 상기 제 2 디코더에 저장된 버퍼 데이터를 삭제하는 재활 로봇 제어 장치. |
| 6 | 제 1 항에 있어서,상기 제어부는,상기 재활 로봇이 정지한 상태에서 상기 사용자의 운동 의도에 대한 분류 단계가 상단 임계치에 도달하는 경우, 상기 재활 로봇을 동작시키고,상기 재활 로봇이 동작하는 상태에서 상기 사용자의 운동 의도에 대한 분류 단계가 하단 임계치에 도달하는 경우, 상기 재활 로봇을 정지시키는 재활 로봇 제어 장치. |
| 7 | 제 4 항에 있어서,상기 디스플레이부는,상기 재활 로봇이 동작 상태 또는 정지 상태인지 여부를 색을 통해 실시간으로 표시하는 재활 로봇 제어 장치. |
| 8 | 제 4 항에 있어서,상기 디스플레이부는,상기 사용자의 운동 의도에 대한 분류 단계를 그래프를 통해 실시간으로 표시하는 재활 로봇 제어 장치. |
| 9 | 제 1 항에 있어서,상기 전처리부는,하나 이상의 뇌파 측정 채널들에 대한 밴드 파워(Band Power)를 기반으로 뇌파 특성을 추출하는 재활 로봇 제어 장치. |
| 10 | 제 1 항에 있어서,상기 전처리부는,하이 패스 필터(High Pass Filter), 밴드 패스 필터(Band Pass Filter) 및 노치 필터(Notch Filter)를 포함하는 필터를 통해 측정된 상기 뇌파 신호를 전처리하는 재활 로봇 제어 장치. |
| 11 | 제 1 항에 있어서,상기 분류부는,뇌파 특성을 추출하는 변환을 통해 전처리된 상기 뇌파 신호를 기 학습된 학습 모델에 적용하여, 상기 사용자의 운동 의도를 분류하는 재활 로봇 제어 장치. |
| 12 | 제 1 항에 있어서,상기 분류부는,이미지 시퀀스로 변환되어 전처리된 상기 뇌파 신호를 기 학습된 CNN 또는 LSTM 으로 구성된 학습 모델에 적용하여, 상기 사용자의 운동 의도를 분류하는 재활 로봇 제어 장치. |
| 13 | 뇌파 신호 측정부가, 사용자의 뇌파 신호를 측정하는 단계;전처리부가, 측정된 상기 뇌파 신호를 전처리하는 단계;분류부가, 상기 전처리부에서 전처리된 상기 뇌파 신호를 기반으로 상기 사용자의 운동 의도를 분류하는 단계; 및제어부가, 사용자의 운동 의도를 실시간으로 반영하여 재활 로봇의 동작 또는 정지를 제어하는 단계를 포함하는 재활 로봇 제어 방법. |
| 14 | 제 13 항에 있어서,상기 분류부가, 상기 전처리부에서 처리된 상기 뇌파 신호를 기반으로 상기 사용자의 운동 의도를 분류하는 단계는,상기 분류부가, CNN, RNN 또는 LSTM 기반의 딥러닝 모델 또는 LDA 또는 SVM 기반의 머신 러닝 모델을 이용하여 상기 사용자의 운동 의도를 분류하는 단계를 포함하는 재활 로봇 제어 방법. |
| 15 | 제 13 항에 있어서,상기 분류부가, 상기 전처리부에서 처리된 상기 뇌파 신호를 기반으로 상기 사용자의 운동 의도를 분류하는 단계는,제 1 디코더가, 상기 재활 로봇의 동작 중 상기 사용자의 운동 의도를 분류하는 단계; 및제 2 디코더가, 상기 재활 로봇의 정지 중 상기 사용자의 운동 의도를 분류하는 단계를 포함하는 재활 로봇 제어 방법. |
| 16 | 제 13 항에 있어서,디스플레이부가, 상기 재활 로봇이 동작 상태 또는 정지 상태인지 여부를 색을 통해 실시간으로 표시하고, 상기 사용자의 운동 의도에 대한 분류 단계를 그래프를 통해 실시간으로 표시하는 단계를 더 포함하는 재활 로봇 제어 방법. |
| 17 | 제 15 항에 있어서,상기 분류부가, 상기 재활 로봇이 동작 상태에서 정지 상태로 변하는 경우, 상기 제 1 디코더에 저장된 버퍼 데이터를 삭제하고, 상기 재활 로봇이 정지 상태에서 동작 상태로 변하는 경우, 상기 제 2 디코더에 저장된 버퍼 데이터를 삭제하는 단계를 더 포함하는 재활 로봇 제어 방법. |
| 18 | 제 13 항에 있어서,상기 제어부가, 사용자의 운동 의도를 실시간으로 반영하여 재활 로봇의 동작 또는 정지를 제어하는 단계는,상기 제어부가, 상기 재활 로봇이 정지한 상태에서 상기 사용자의 운동 의도에 대한 분류 단계가 상단 임계치에 도달하는 경우, 상기 재활 로봇을 동작시키고, 상기 재활 로봇이 동작하는 상태에서 상기 사용자의 운동 의도에 대한 분류 단계가 하단 임계치에 도달하는 경우, 상기 재활 로봇을 정지시키는 단계를 포함하는 재활 로봇 제어 방법. |
| 19 | 제 13 항에 있어서,상기 분류부가, 상기 전처리부에서 처리된 상기 뇌파 신호를 기반으로 상기 사용자의 운동 의도를 분류하는 단계는,상기 분류부가, 뇌파 특성을 추출하는 변환을 통해 전처리된 상기 뇌파 신호를 기 학습된 학습 모델에 적용하여, 상기 사용자의 운동 의도를 분류하는 단계를 포함하는 재활 로봇 제어 방법. |
| 20 | 제 13 항에 있어서,상기 분류부가, 상기 전처리부에서 처리된 상기 뇌파 신호를 기반으로 상기 사용자의 운동 의도를 분류하는 단계는,상기 분류부가, 이미지 시퀀스로 변환되어 전처리된 상기 뇌파 신호를 기 학습된 CNN 또는 LSTM으로 구성된 학습 모델에 적용하여, 상기 사용자의 운동 의도를 분류하는 단계를 포함하는 재활 로봇 제어 방법. |