| 번호 | 청구항 |
|---|---|
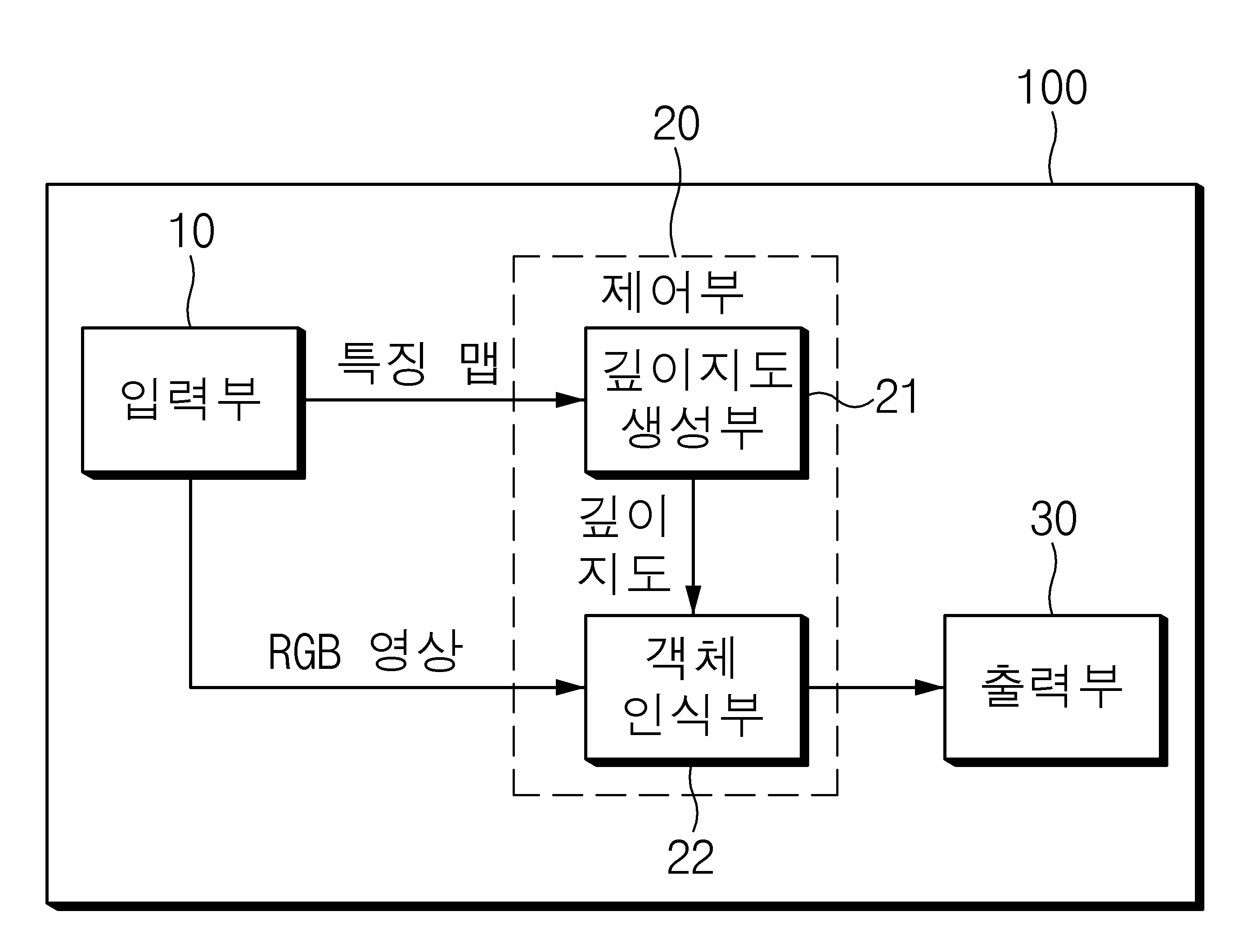
| 1 | DCNN(Dilated Convolutional Neural Network)를 기반으로 영상의 특징 맵(Feature Map)을 이용하여 깊이지도를 생성하는 깊이지도 생성부;상기 깊이지도 생성부에 의해 생성된 깊이지도와 상기 영상을 이용하여 객체를 인식하는 객체 인식부; 및RGB 영상의 특징 맵을 상기 깊이지도 생성부로 입력하고, RGB 영상을 상기 객체 인식부로 입력하는 입력부를 포함하되,상기 입력부는,상기 RGB 영상을 이용하여 제1 특징 맵을 생성하는 제1 컨볼루션 모듈;상기 RGB 영상의 Gray 영상을 이용하여 제2 특징 맵을 생성하는 제2 컨볼루션 모듈; 및상기 제1 컨볼루션 모듈에 의해 생성된 제1 특징 맵과 상기 제2 컨볼루션 모듈에 의해 생성된 제2 특징 맵을 결합(Concatenation)하여 제3 특징 맵을 생성하는 결합 모듈를 포함하는 영상을 이용한 객체 인식 장치. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 제 1 항에 있어서,상기 제1 컨볼루션 모듈과 상기 제2 컨볼루션 모듈은,각각 3×3 필터를 이용하는 것을 특징으로 하는 영상을 이용한 객체 인식 장치. |
| 5 | DCNN(Dilated Convolutional Neural Network)를 기반으로 영상의 특징 맵(Feature Map)을 이용하여 깊이지도를 생성하는 깊이지도 생성부;상기 깊이지도 생성부에 의해 생성된 깊이지도와 상기 영상을 이용하여 객체를 인식하는 객체 인식부; 및RGB 영상의 특징 맵을 상기 깊이지도 생성부로 입력하고, RGB 영상을 상기 객체 인식부로 입력하는 입력부를 포함하되,상기 입력부는,상기 RGB 영상을 이용하여 제1 특징 맵을 생성하는 제1 컨볼루션 모듈;상기 RGB 영상의 Gray 영상을 이용하여 제2 특징 맵을 생성하는 제2 컨볼루션 모듈;라이다 영상을 이용하여 제3 특징 맵을 생성하는 제3 컨볼루션 모듈; 및상기 제1 컨볼루션 모듈에 의해 생성된 제1 특징 맵과 상기 제2 컨볼루션 모듈에 의해 생성된 제2 특징 맵과 상기 제3 컨볼루션 모듈에 의해 생성된 제3 특징 맵을 결합(Concatenation)하여 제4 특징 맵을 생성하는 결합 모듈을 포함하는 영상을 이용한 객체 인식 장치. |
| 6 | 제 5 항에 있어서,상기 제1 컨볼루션 모듈과 상기 제2 컨볼루션 모듈 및 상기 제3 컨볼루션 모듈은,각각 3×3 필터를 이용하는 것을 특징으로 하는 영상을 이용한 객체 인식 장치. |
| 7 | DCNN(Dilated Convolutional Neural Network)를 기반으로 영상의 특징 맵(Feature Map)을 이용하여 깊이지도를 생성하는 깊이지도 생성부; 및상기 깊이지도 생성부에 의해 생성된 깊이지도와 상기 영상을 이용하여 객체를 인식하는 객체 인식부를 포함하되,상기 깊이지도 생성부는,상기 특징 맵의 해상도를 점차 감소시켰다가 다시 복귀시키는 방식으로 깊이지도를 생성하는 것을 특징으로 하는 영상을 이용한 객체 인식 장치. |
| 8 | 제 7 항에 있어서,상기 깊이지도 생성부는,상기 특징 맵의 해상도에 상응하는 팽창률(Dilation rate)을 적용하는 것을 특징으로 하는 영상을 이용한 객체 인식 장치. |
| 9 | 제 7 항에 있어서,상기 깊이지도 생성부는,상기 특징 맵의 해상도를 절반씩 감소시키는 것을 특징으로 하는 영상을 이용한 객체 인식 장치. |
| 10 | 제 7 항에 있어서,상기 깊이지도 생성부는,상기 특징 맵의 해상도를 점차 감소시켰다가 다시 복귀시키는 과정에서, 동일 채널의 특징 맵을 각각 결합하는 복수의 결합모듈(Concatenation Module)을 포함하는 영상을 이용한 객체 인식 장치. |
| 11 | 깊이지도 생성부가 DCNN(Dilated Convolutional Neural Network)를 기반으로 영상의 특징 맵(Feature Map)을 이용하여 깊이지도를 생성하는 단계;객체 인식부가 상기 생성된 깊이지도와 상기 영상을 이용하여 객체를 인식하는 단계; 및입력부가 RGB 영상의 특징 맵을 상기 깊이지도 생성부로 입력하고, RGB 영상을 상기 객체 인식부로 입력하는 단계를 포함하되,상기 입력하는 단계는,제1 컨볼루션 모듈이 상기 RGB 영상을 이용하여 제1 특징 맵을 생성하는 단계;제2 컨볼루션 모듈이 상기 RGB 영상의 Gray 영상을 이용하여 제2 특징 맵을 생성하는 단계; 및결합 모듈이 상기 제1 컨볼루션 모듈에 의해 생성된 제1 특징 맵과 상기 제2 컨볼루션 모듈에 의해 생성된 제2 특징 맵을 결합(Concatenation)하여 제3 특징 맵을 생성하는 단계를 포함하는 영상을 이용한 객체 인식 방법. |
| 12 | 삭제 |
| 13 | 삭제 |
| 14 | 제 11 항에 있어서,상기 제1 컨볼루션 모듈과 상기 제2 컨볼루션 모듈은,각각 3×3 필터를 이용하는 것을 특징으로 하는 영상을 이용한 객체 인식 방법. |
| 15 | 깊이지도 생성부가 DCNN(Dilated Convolutional Neural Network)를 기반으로 영상의 특징 맵(Feature Map)을 이용하여 깊이지도를 생성하는 단계;객체 인식부가 상기 생성된 깊이지도와 상기 영상을 이용하여 객체를 인식하는 단계; 및입력부가 RGB 영상의 특징 맵을 상기 깊이지도 생성부로 입력하고, RGB 영상을 상기 객체 인식부로 입력하는 단계를 포함하되,상기 입력하는 단계는,제1 컨볼루션 모듈이 상기 RGB 영상을 이용하여 제1 특징 맵을 생성하는 단계;제2 컨볼루션 모듈이 상기 RGB 영상의 Gray 영상을 이용하여 제2 특징 맵을 생성하는 단계;제3 컨볼루션 모듈이 라이다 영상을 이용하여 제3 특징 맵을 생성하는 단계; 및결합 모듈이 상기 제1 컨볼루션 모듈에 의해 생성된 제1 특징 맵과 상기 제2 컨볼루션 모듈에 의해 생성된 제2 특징 맵과 상기 제3 컨볼루션 모듈에 의해 생성된 제3 특징 맵을 결합(Concatenation)하여 제4 특징 맵을 생성하는 단계를 포함하는 영상을 이용한 객체 인식 방법. |
| 16 | 제 15 항에 있어서,상기 제1 컨볼루션 모듈과 상기 제2 컨볼루션 모듈 및 상기 제3 컨볼루션 모듈은,각각 3×3 필터를 이용하는 것을 특징으로 하는 영상을 이용한 객체 인식 방법. |
| 17 | 깊이지도 생성부가 DCNN(Dilated Convolutional Neural Network)를 기반으로 영상의 특징 맵(Feature Map)을 이용하여 깊이지도를 생성하는 단계; 및객체 인식부가 상기 생성된 깊이지도와 상기 영상을 이용하여 객체를 인식하는 단계를 포함하되,상기 깊이지도를 생성하는 단계는,상기 특징 맵의 해상도를 점차 감소시켰다가 다시 복귀시키는 방식으로 깊이지도를 생성하는 것을 특징으로 하는 영상을 이용한 객체 인식 방법. |
| 18 | 제 17 항에 있어서,상기 깊이지도를 생성하는 단계는,상기 특징 맵의 해상도에 상응하는 팽창률(Dilation rate)을 적용하는 것을 특징으로 하는 영상을 이용한 객체 인식 방법. |
| 19 | 제 17 항에 있어서,상기 깊이지도를 생성하는 단계는,상기 특징 맵의 해상도를 절반씩 감소시키는 것을 특징으로 하는 영상을 이용한 객체 인식 방법. |
| 20 | 제 17 항에 있어서,상기 깊이지도를 생성하는 단계는,상기 특징 맵의 해상도를 점차 감소시켰다가 다시 복귀시키는 과정에서, 동일 채널의 특징 맵을 각각 결합하는 단계를 포함하는 영상을 이용한 객체 인식 방법. |