| 번호 | 청구항 |
|---|---|
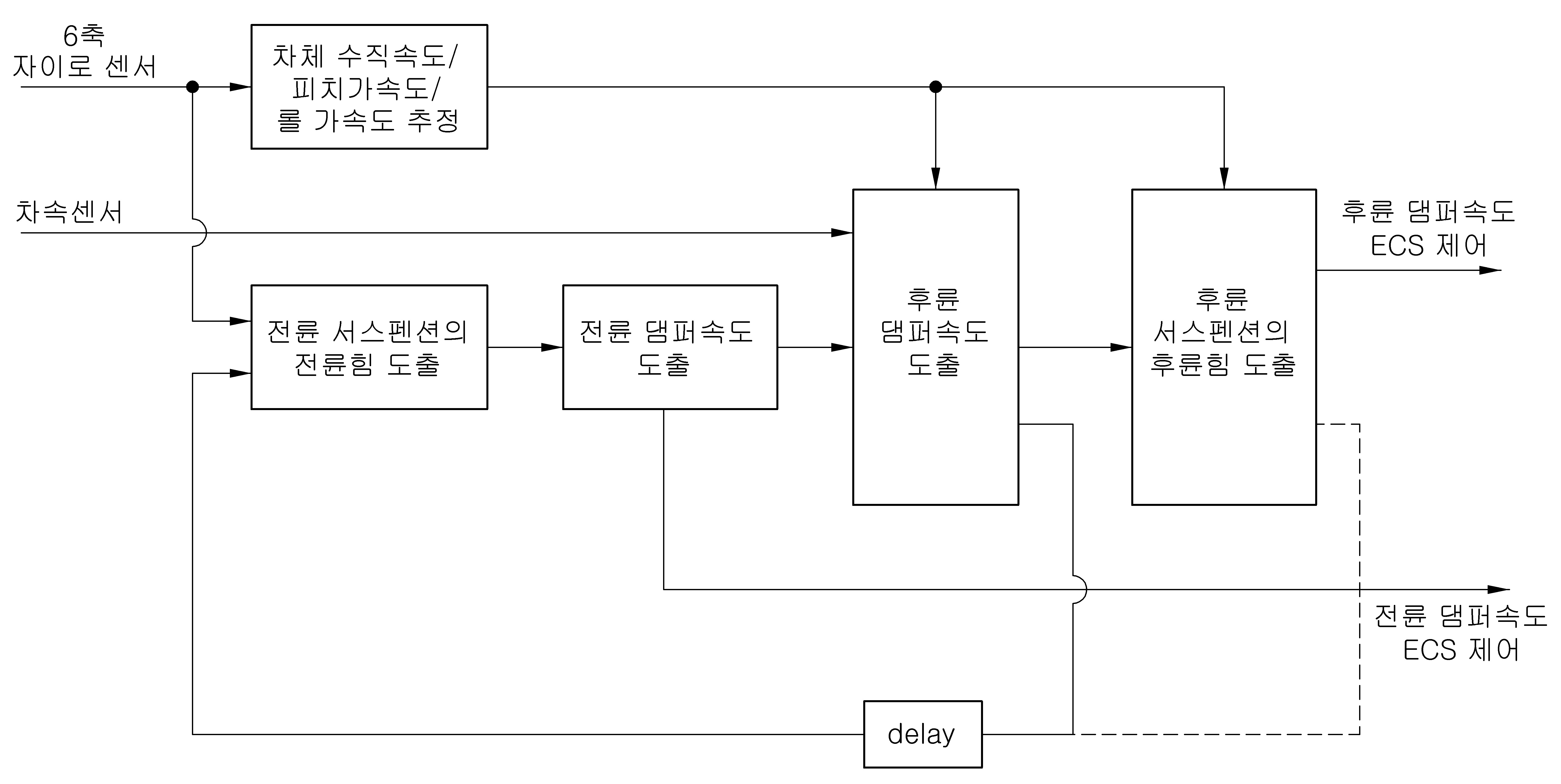
| 1 | 미리 저장된 차량 무게값과 센서를 통해 측정된 차체 수직가속도값을 이용하여 전륜서스펜션에 작용되는 전륜힘값을 도출하는 제1계산단계;제1계산단계에서 도출된 전륜힘값을 입력받아 전륜서스펜션의 전륜댐퍼속도값을 도출하는 제2계산단계;제2계산단계에서 도출된 전륜댐퍼속도값을 이용하여 전륜 휠수직속도값을 도출하고, 도출된 전륜 휠수직속도값을 이용하여 후륜 휠수직속도값을 추정하며, 후륜 휠수직속도값으로 후륜댐퍼속도값을 도출하는 제3계산단계; 및도출된 전륜서스펜션의 전륜댐퍼속도값과 후륜서스펜션의 후륜댐퍼속도값으로 전륜서스펜션 및 후륜서스펜션의 댐퍼를 제어하는 제어단계;를 포함하는 차량용 댐퍼 제어 방법. |
| 2 | 청구항 1에 있어서,전륜서스펜션은 좌측 전륜서스펜션과 우측 전륜서스펜션으로 구분되고, 후륜서스펜션은 좌측 후륜서스펜션과 우측 후륜서스펜션으로 구분되며, 전륜서스펜션과 후륜서스펜션의 댐퍼속도값은 좌측과 우측에 대해 각기 도출되는 것을 특징으로 하는 차량용 댐퍼 제어 방법. |
| 3 | 청구항 1에 있어서,제1계산단계에서 전륜힘값은 하기의 식을 통해 도출되는 것을 특징으로 하는 차량용 댐퍼 제어 방법.식 1 : 식 2 : FL1:좌측 전륜서스펜션의 전륜힘값 FL2:좌측 후륜서스펜션의 전륜힘값FR1:우측 전륜서스펜션의 전륜힘값 FR2:우측 후륜서스펜션의 전륜힘값ms:차체 중량 az:수직가속도:피치 관성 :롤 관성:피치가속도 :롤가속도lf:전륜휠과 차체중심 사이의 거리 lr:후륜휠과 차체중심 사이의 거리 |
| 4 | 청구항 3에 있어서,식 1 및 식 2는 수직방향, 피치방향, 롤방향에 따른 차량모델 운동방정식을 통해 전륜힘값이 도출되고, 수직방향[식 3], 피치방향[식 4], 롤방향[식 5]에 따른 운동방정식은 하기과 같은 것을 특징으로 하는 차량용 댐퍼 제어 방법.식 3 : 식 4 : 식 5 : |
| 5 | 청구항 3에 있어서,제1계산단계에서 최초 전륜힘값을 도출시 FL2와 FR2는 초기값인 0으로 설정하고, 이후 FL2와 FR2이 도출되면 도출된 FL2와 FR2을 대입하여 전륜힘값을 산출하는 것을 특징으로 하는 차량용 댐퍼 제어 방법. |
| 6 | 청구항 3에 있어서,제2계산단계는 제1계산단계에서 도출된 전륜힘값을 입력받아 하기 수식을 통해 전륜댐퍼속도값을 도출하는 것을 특징으로 하는 차량용 댐퍼 제어 방법.식 6 : 식 7 : kL1,kR1:스프링상수 bL1,bR1:전륜댐퍼변위bL1,bR1:댐핑계수 L1,R1:전륜댐퍼속도 |
| 7 | 청구항 6에 있어서,제3계산단계에서는 제2계산단계에서 도출된 전륜댐퍼속도값을 입력받아 하기 수식을 통해 전륜 휠수직속도값을 도출하는 것을 특징으로 하는 차량용 댐퍼 제어 방법.식 8 : 식 9 : VuL1,VuR1:전륜 휠수직속도값VsL1,VsR1:전륜 차체수직속도값 |
| 8 | 청구항 7에 있어서,제3계산단계에서는 전륜 휠수직속도값이 도출되면, 전륜과 후륜의 위치차 및 차속에 따라 지연시켜 후륜 휠수직속도값(VuL2,VuR2)을 도출하는 것을 특징으로 하는 차량용 댐퍼 제어 방법. |
| 9 | 청구항 8에 있어서,제3계산단계에서는 하기의 수식을 통해 후륜댐퍼속도값을 도출하는 것을 특징으로 하는 차량용 댐퍼 제어 방법.식 10 : 식 11 : L2,R2:후륜댐퍼속도값VsL2,VsR2:후륜 차체수직속도값 |
| 10 | 청구항 9에 있어서,제3계산단계를 통해 후륜댐퍼속도값이 도출되면, 후륜댐퍼속도값을 이용하여 후륜서스펜션에 작용되는 후륜힘값을 도출하는 제4계산단계;를 더 포함하는 것을 특징으로 하는 차량용 댐퍼 제어 방법.식 12: 식 13 : |