| 번호 | 청구항 |
|---|---|
| 1 | 적어도 하나의 장애물이 포함된 3차원 영상을 획득하는 카메라;상기 장애물의 종류를 판별하는 정보를 저장하는 저장부; 및미리 결정된 제1기준점을 기준으로 상기 영상의 좌표 정보를 도출하고,상기 저장부에 저장된 정보와 상기 좌표 정보를 기초로 상기 장애물의 위치 및 크기를 산출하고, 상기 장애물의 이동여부를 판단하는 제어부; 를 포함하되,상기 제어부는, 상기 좌표의 미리 결정된 제2기준점으로부터의 위치를 기초로 상기 좌표를 포함하는 미리 결정된 크기를 갖는 셀을 형성하고,차량의 속도, 상기 차량의 요레이트(Yaw rate) 및 미리 결정된 상기 셀의 크기를 기초로 상기 좌표의 속도 및 상기 좌표와 상기 제2기준점으로부터의 위치를 수정하는 차량. |
| 2 | 제1항에 있어서,상기 제어부는, 상기 영상의 상기 제1기준점을 기준으로 한 수직정보를 나타내는 Y축, 상기 영상의 상기 제1기준점을 기준으로 한 깊이 정보를 나타내는 Z축으로 구성된 상기 좌표 정보를 기초로 임의의 같은 깊이 정보를 갖는 좌표 중 가장 낮은 수직 위치 정보를 갖는 좌표의 집합을 기준선으로 도출하는 차량. |
| 3 | 제2항에 있어서,상기 제어부는,상기 좌표의 속도, 상기 좌표의 상기 기준선과 수직 거리, 상기 좌표의 상기 제2기준점으로부터의 위치 및 상기 좌표의 지속시간을 도출하는 차량. |
| 4 | 제3항에 있어서,상기 제어부는,상기 영상의 상기 제1기준점을 기준으로 한 수평정보를 나타내는 X축, 상기 영상의 상기 제1기준점을 기준으로 한 깊이 정보를 나타내는 Z축으로 구성된 좌표 정보를 도출하는 차량. |
| 5 | 삭제 |
| 6 | 삭제 |
| 7 | 제2항에 있어서,상기 제어부는,상기 좌표와 상기 기준선의 수직 거리와 미리 결정된 상기 셀의 높이의 차이에 기초하여 상기 셀의 가중치를 부여하는 차량. |
| 8 | 제1항에 있어서,상기 제어부는,상기 셀이 포함하고 있는 상기 좌표의 평균속도와 상기 좌표의 위치의 분산 값을 비교하여 상기 장애물의 이동여부를 판단하는 차량. |
| 9 | 제3항에 있어서상기 제어부는,상기 지속시간이 미리 결정된 값 이상인 상기 좌표를 기초로 상기 장애물의 이동여부를 판단하는 차량. |
| 10 | 제4항에 있어서,상기 제어부는,상기 X축으로 구성된 좌표정보를 상기 영상의 제3기준점을 기준으로 하는 수평정보를 나타내는 U축으로 구성된 좌표 정보로 변환하는 차량. |
| 11 | 제10항에 있어서,상기 제어부는,상기 U축과 상기 X축으로 구성된 좌표정보를 기초로 동적 계획법(dynamic programming)을 수행한 결과 값을 도출하고, 상기 결과 값을 기초로 상기 장애물의 위치와 상기 장애물의 크기를 산출하는 차량. |
| 12 | 제 11항에 있어서,상기 제어부는,상기 결과 값을 기초로 근사화 된 직선을 도출하고, 상기 직선의 길이를 기초로 상기 장애물의 위치와 상기 장애물의 크기를 산출하는 차량. |
| 13 | 제 11항에 있어서,상기 제어부는,상기 결과 값을 기초로GOD(General Obstacle Detection)를 수행하여 상기 장애물의 위치와 상기 장애물의 크기를 산출하는 차량. |
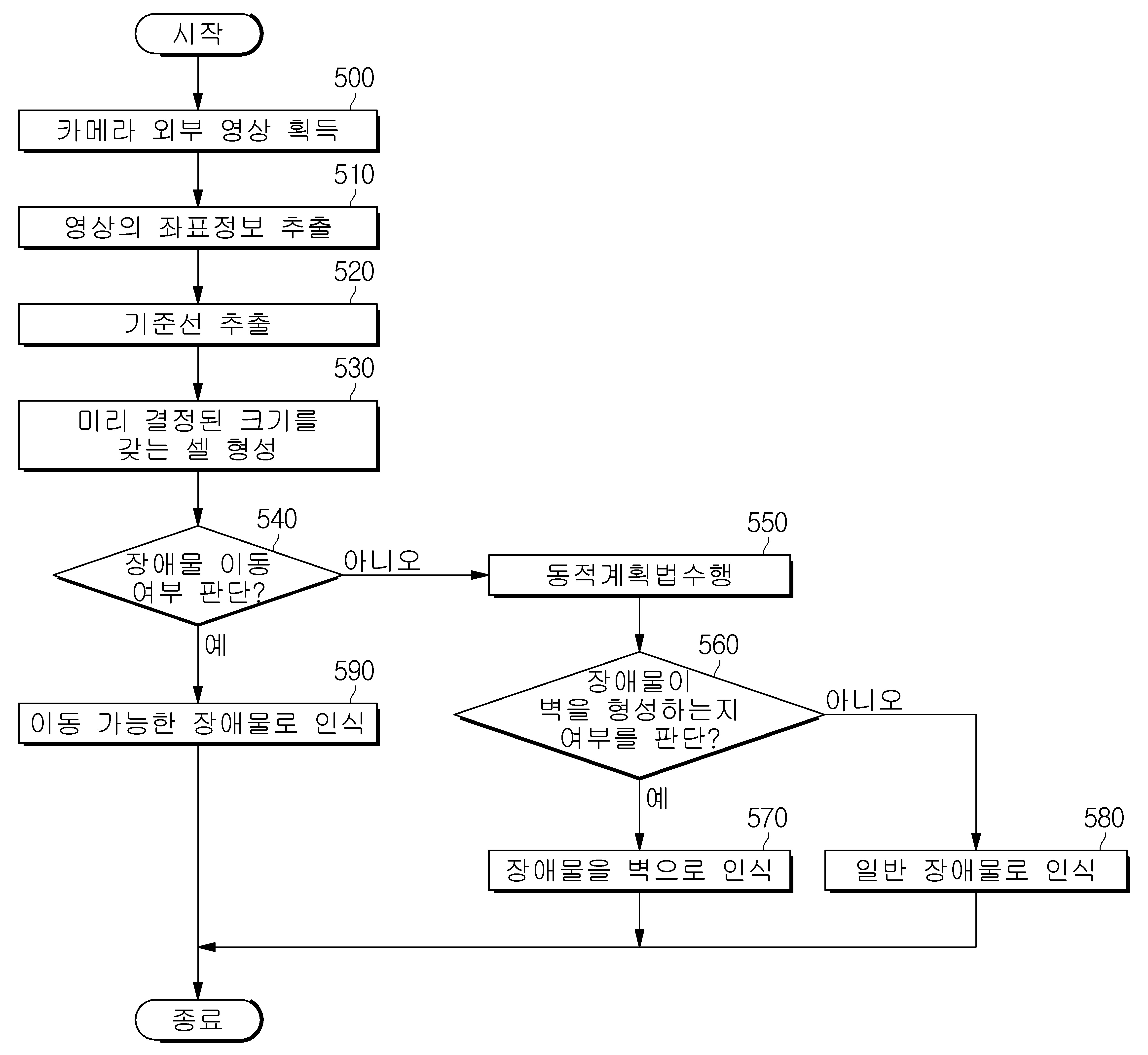
| 14 | 적어도 하나의 장애물이 포함된 3차원 영상을 획득하고;미리 결정된 제1기준점을 기준으로 상기 영상의 좌표 정보를 도출하고;저장부에 저장된 정보와 상기 좌표 정보를 기초로 상기 장애물의 위치 및 크기를 산출하고; 상기 장애물의 이동여부를 판단하는 것;을 포함하되,상기 장애물의 이동여부를 판단하는 것은,상기 좌표의 미리 결정된 제2기준점으로부터의 위치를 기초로 상기 좌표를 포함하는 미리 결정된 크기를 갖는 셀을 형성하고,차량의 속도, 차랑의 요레이트(Yaw rate) 및 미리 결정된 상기 셀의 크기를 기초로 상기 좌표의 속도 및 상기 좌표와 상기 제2기준점으로부터의 위치를 수정하는 것을 포함하는 장애물 검출 방법. |
| 15 | 제 14항에 있어서,상기 좌표 정보를 도출하는 것은,상기 영상의 상기 제1기준점을 기준으로 한 수직정보를 나타내는 Y축, 상기 영상의 상기 제1기준점을 기준으로 한 깊이 정보를 나타내는 Z축으로 구성된 상기 좌표 정보를 기초로 임의의 같은 깊이 정보를 갖는 좌표 중 가장 낮은 수직 위치 정보를 갖는 좌표의 집합을 기준선으로 도출하는 것을 더 포함하는 장애물 검출 방법 |
| 16 | 제 15항에 있어서,상기 좌표의 속도, 상기 좌표의 상기 기준선과 수직 거리, 상기 좌표의 상기 제2기준점으로부터의 위치 및 상기 좌표의 지속시간을 도출하는 것을 더 포함하는 장애물 검출 방법. |
| 17 | 제 16항에 있어서,상기 좌표 정보를 도출하는 것은,상기 영상의 상기 제1기준점을 기준으로 한 수평정보를 나타내는 X축, 상기 영상의 상기 제1기준점을 기준으로 한 깊이 정보를 나타내는 Z축으로 구성된 좌표 정보를 도출하는 것을 더 포함하는 장애물 검출 방법. |
| 18 | 삭제 |
| 19 | 삭제 |
| 20 | 제 15항에 있어서,상기 좌표와 상기 기준선의 수직 거리와 미리 결정된 상기 셀의 높이의 차이에 기초하여 상기 셀의 가중치를 부여하는 것을 더 포함하는 장애물 검출 방법. |
| 21 | 제 14항에 있어서,상기 장애물의 이동여부를 판단하는 것은,상기 셀이 포함하고 있는 상기 좌표의 평균속도와 상기 좌표의 위치의 분산 값을 비교하는 것을 더 포함하는 장애물 검출 방법. |
| 22 | 제 16항에 있어서,상기 장애물의 이동여부를 판단하는 것은,상기 지속시간이 미리 결정된 값 이상인 상기 좌표를 기초로 상기 장애물의 이동여부를 판단하는 것을 더 포함하는 장애물 검출 방법. |
| 23 | 제 17항에 있어서,상기 좌표 정보를 도출하는 것은,상기 X축을 상기 영상의 제3기준점을 기준으로 하는 수평정보를 나타내는 U축으로 구성된 좌표 정보로 변환하는 것을 더 포함하는 장애물 검출 방법. |
| 24 | 제 23항에 있어서,상기 장애물의 위치 및 크기를 산출하는 것은,상기 U축과 상기 Z축으로 구성된 상기 좌표 정보를 기초로 동적 계획법(dynamic programming)을 수행한 결과 값을 도출하고, 상기 결과 값을 기초로 상기 장애물의 위치와 상기 장애물의 크기를 산출하는 것을 더 포함하는 장애물 검출 방법. |
| 25 | 제 24항에 있어서,상기 장애물의 위치 및 크기를 산출하는 것은,상기 결과 값을 기초로 근사화 된 직선을 도출하고, 상기 직선의 길이를 기초로 상기 장애물의 위치와 상기 장애물의 크기를 산출하는 것을 더 포함하는 장애물 검출 방법. |
| 26 | 제24항에 있어서,상기 장애물의 위치 및 크기를 산출하는 것은,상기 결과 값을 기초로 GOD(General Obstacle Detection)를 수행하여 상기 장애물의 위치와 상기 장애물의 크기를 산출하는 것을 더 포함하는 장애물 검출 방법. |