| 번호 | 청구항 |
|---|---|
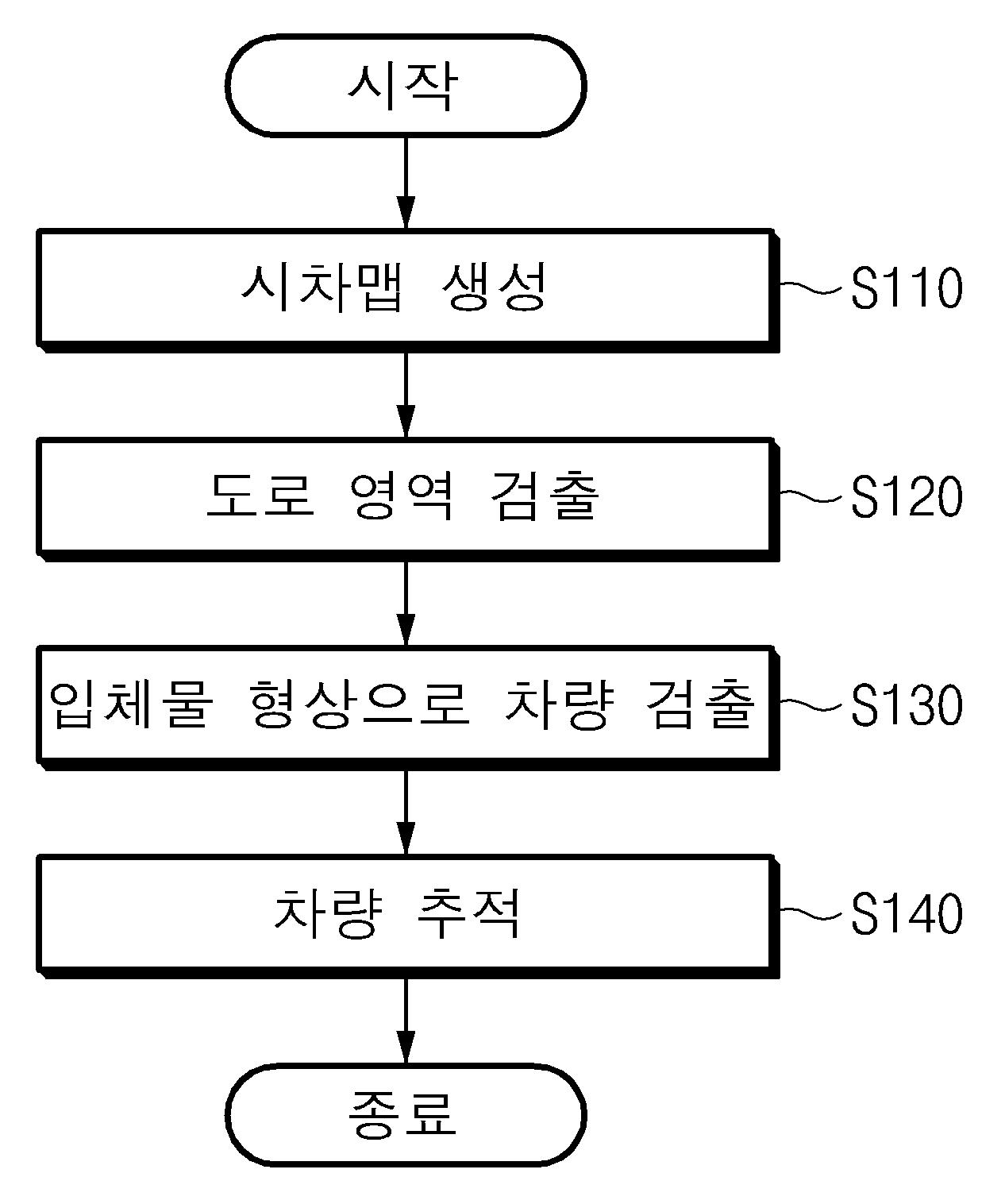
| 1 | 스테레오 카메라에 의해 촬상된 이미지를 이용하여 시차맵(disparity map)을 생성하는 단계;상기 시차맵 상에서 도로 영역을 검출하는 단계; 및상기 도로 영역에 존재하는 차량을 입체물 형상으로 검출하는 단계;를 포함하며,상기 차량을 입체물 형상으로 검출하는 단계는,상기 시차맵을 탑 뷰(Top-View) 이미지로 변환하는 단계;상기 탑 뷰 이미지에서 사각형 형상의 차량 영역을 검출하는 단계;상기 탑 뷰 이미지를 시차맵으로 변환하는 단계; 및상기 시차맵을 이용하여 상기 차량 영역의 높이를 검출하는 단계;를 포함하는 차량 검출 방법. |
| 2 | 제1항에 있어서,상기 도로 영역을 검출하는 단계는,상기 시차맵을 이용하여 v-시차맵(v-disparity map)을 생성하는 단계;상기 v-시차맵에서 직선 형태의 도로 성분을 검출하는 단계; 및상기 도로 성분을 이용하여 상기 시차맵에서 도로 영역을 검출하는 단계;를 포함하는 것을 특징으로 하는 차량 검출 방법. |
| 3 | 제2항에 있어서,상기 도로 성분을 검출하는 단계는,상기 v-시차맵에서 복수의 도로 성분을 검출하는 것을 특징으로 하는 차량 검출 방법. |
| 4 | 제1항에 있어서,상기 시차맵을 탑 뷰 이미지로 변환하는 단계는,상기 시차맵 상에 기 설정된 형상을 가지는 가상의 3차원 구조물을 생성하는 단계;상기 3차원 구조물의 밑면이 상기 도로 영역과 일치하도록 상기 3차원 구조물을 변형하는 단계; 및상기 변형된 3차원 구조물에 포함된 영역을 탑 뷰 이미지로 변환하는 단계;를 포함하는 것을 특징으로 하는 차량 검출 방법. |
| 5 | 삭제 |
| 6 | 삭제 |
| 7 | 제1항에 있어서,상기 차량 영역을 검출하는 단계는,상기 탑 뷰 이미지에 존재하는 장애물 중 기 설정된 높이 이상의 장애물을 차량 영역으로 검출하는 것을 특징으로 하는 차량 검출 방법. |
| 8 | 제1항에 있어서,상기 차량 영역을 검출하는 단계는,카메라로부터 차량까지의 거리에 따라 차량이 차지하는 픽셀 수를 고려하여 상기 차량 영역을 검출하는 것을 특징으로 하는 차량 검출 방법. |
| 9 | 스테레오 카메라에 의해 촬상된 이미지를 이용하여 시차맵(disparity map)을 생성하는 단계;상기 시차맵 상에서 도로 영역을 검출하는 단계;상기 도로 영역에 존재하는 차량을 입체물 형상으로 검출하는 단계;상기 스테레오 카메라에 의해 촬상된 이미지에 상기 차량에 대응되는 가상의 입체물을 생성하는 단계;상기 입체물 영역 내에서 특징점을 검출하는 단계;상기 특징점을 상기 이미지와 시간적으로 연속하는 이미지에서 검출된 특징점과 비교하여 모션 벡터를 산출하는 단계; 및상기 모션 벡터에 따라 상기 입체물의 위치를 이동시키는 단계;를 더 포함하는 것을 특징으로 하는 차량 검출 방법. |