| 번호 | 청구항 |
|---|---|
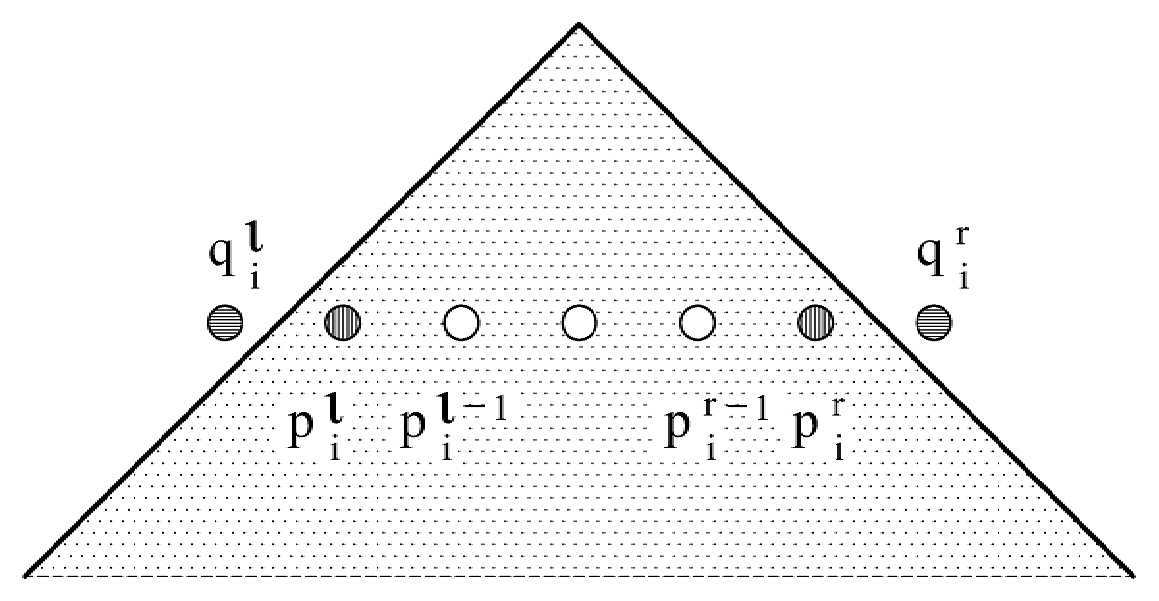
| 1 | 데이터 생성 장치가, 카메라(camera)에 의해 촬영된 이미지(image) 및 라이다에 의해 획득된 점군(point cloud) 데이터에 대한 각각 하나의 프레임을 추출하는 단계;상기 데이터 생성 장치가, 상기 추출된 이미지 및 라이다 각각의 하나의 프레임에 포함된 캘리브레이션 보드(calibration board)에 대한 특징점을 식별하는 단계; 상기 데이터 생성 장치가, 상기 식별된 특징점을 기초로 상기 카메라 및 상기 라이다의 캘리브레이션을 수행하는 단계; 를 포함하는 것을 특징으로 하고,상기 특징점을 식별하는 단계는, 상기 점군 데이터를 구성하는 에지 포인트를 기초로 증강 포인트를 생성하는 단계;상기 에지 포인트 및 상기 증강 포인트의 위치정보를 기초로 상기 캘리브레이션 보드(calibration board)의 상기 특징점을 다시 결정하는 단계를 포함하며,상기 증강 포인트를 생성하는 단계는,상기 에지 포인트의 연결 선이 연장된 위치에 상기 캘리브레이션 보드(calibration board)의 경계를 넘어 상기 증강 포인트를 생성하는 단계;를 포함하고,상기 증강 포인트를 생성하는 단계는,상기 에지 포인트에 대응되는 스캔 라인 상의 이전 에지 포인트의 위치정보를 기초로, 상기 증강 포인트을 생성하며,상기 증강 포인트를 생성하는 단계는,에지 포인트와 이전 에지 포인트를 잇는 직선을 연장하여 캘리브레이션 타겟의 경계 외부에 가상의 점을 생성하고,상기 증강 포인트를 생성하는 단계는,상기 스캔 라인의 에지 포인트들 상호간의 벡터만큼 외삽한 지점에 증강 포인트를 생성하는, 캘리브레이션 방법. |