| 번호 | 청구항 |
|---|---|
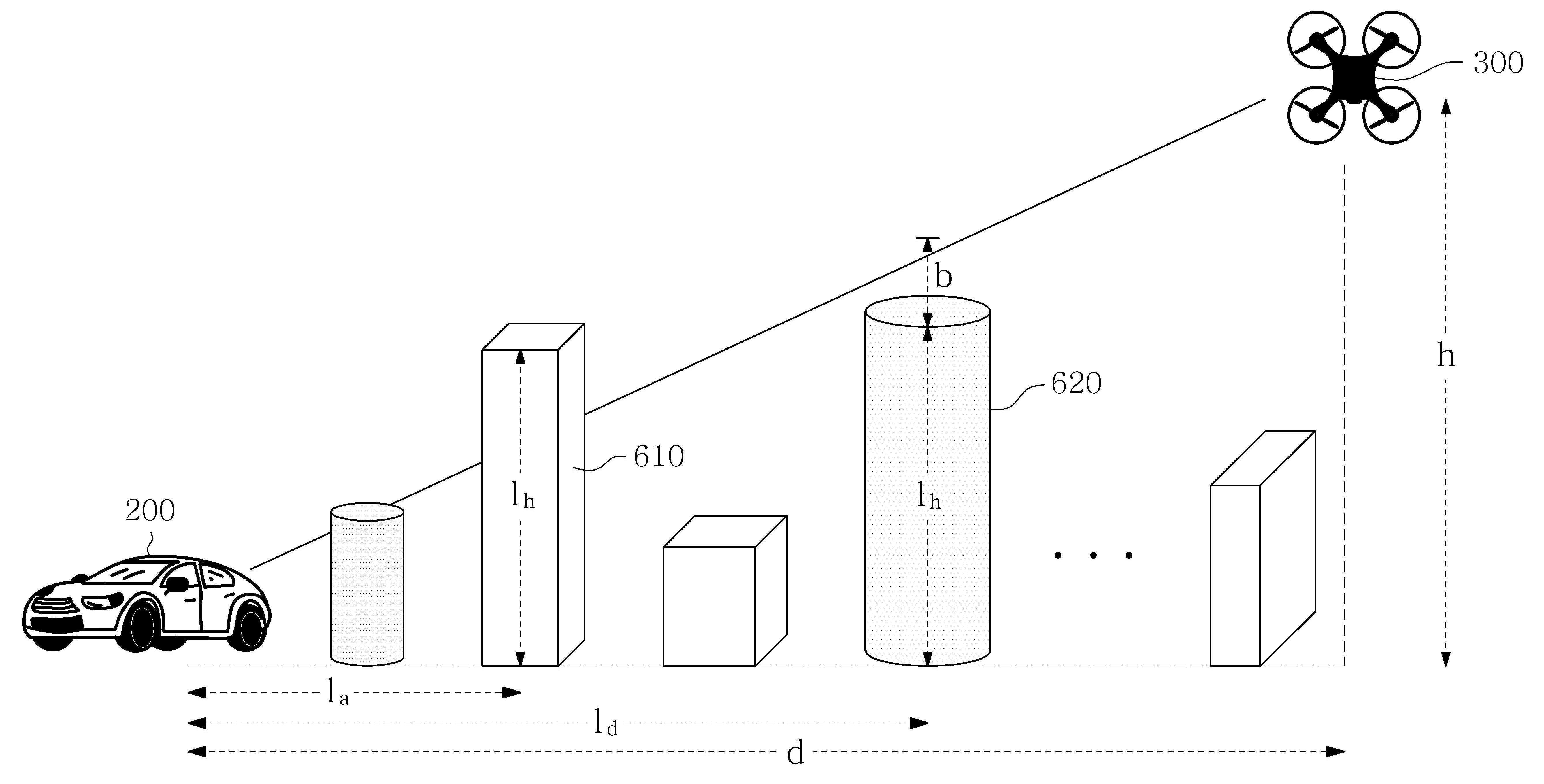
| 1 | 전자 장치에 있어서,프로세서 (processor); 및상기 프로세서를 제어하는 하나 이상의 인스트럭션 (instruction) 을 저장하는 하나 이상의 메모리 (memory); 를 포함하고, 상기 프로세서는:상기 전자 장치의 탑승자에 대한 탑승자 행동 감지 정보를 획득하고,상기 탑승자 행동 감지 정보를 AI (artificial intelligence) 엔진 (engine) 에 입력하고,상기 탑승자 행동 감지 정보에 대응하는 상기 AI 엔진의 출력 동작에 기반하여, 상기 탑승자에 대한 탑승 상황 판단 정보를 획득하고,상기 탑승 상황 판단 정보에 기반하여, 상기 탑승자를 위한 지원 요청 정보가 포함된 신호를 관제 센터에 연계된 드론(drone)으로 전송하고,상기 탑승자와 동행하여 탑승한 존재가 확인되는 경우, 상기 동행 탑승한 존재와 상기 탑승자 사이에 일정 시간 동안 아무런 의사 소통 및 동작 교환이 확인되지 않으면, 상기 탑승자 행동 감지 정보가 상기 프로세서에 의해 획득되도록 설정되고,상기 프로세서는:상기 탑승자 행동 감지 정보에 기반하여, 상기 탑승자의 안전과 관련된 위험 상태를 판단하고,상기 판단된 위험 상태에 대한 정보 및 상기 판단된 위험 상태에 대응하는 안전 지원과 관련된 정보를 포함하도록 설정된 상기 탑승 상황 판단 정보를 출력하고,상기 프로세서는:상기 전자 장치의 위치 정보에 기반하여, 상기 전자 장치 및 상기 드론 사이의 통신 지형에 대한 정보를 획득하고,상기 통신 지형에 대한 정보에 기반하여, 상기 신호의 전송을 위한 전송 전력의 판단과 관련된 통신 지형 분포 함수를 산출하고,상기 통신 지형 분포 함수에 기반하여 판단된 전송 전력에 따라 상기 신호를 전송하고,상기 프로세서는:아래의 수학식이 만족되는 경우, 상기 통신 지형 내 지형물이 상기 전자 장치와 상기 드론 사이의 통신에 방해가 될 가능성이 있는 높이에 해당하는 것으로 판단하되,[수학식]lh 는 상기 지형물의 높이를 나타내고, b 는 상기 지형물의 높이에 따른 간접적인 방해까지 최대한 반영하기 위해 정의되는 부가 파라미터를 나타내고, h 는 상기 드론이 운용되는 높이를 나타내고, ld 는 상기 전자 장치와 지형물 사이의 직선 거리를 나타내고, d 는 상기 전자 장치와 상기 드론의 직선 거리를 나타내고,상기 프로세서는:상기 탑승 상황 판단 정보에 기반하여, 상기 탑승자가 일반적인 탑승 상황에 해당함을 확인하고,상기 탑승자가 일반적인 탑승 상황에 해당하는 점에 기반하여, 상기 전자 장치 내 상기 탑승자에 대한 경고음을 발생시키고,상기 탑승 상황 판단 정보에 기반하여, 상기 탑승자가 위급한 탑승 상황에 해당함을 확인하고,상기 탑승자가 위급한 탑승 상황에 해당하는 점에 기반하여, 상기 신호를 전송하도록 결정하는, 전자 장치. |