| 번호 | 청구항 |
|---|---|
| 10 | 제8항에 있어서, 상기 카메라 스케줄은 카메라의 이동 간격을 고려하여 최적화되는 것을 특징으로 하는 컴퓨팅 장치. |
| 9 | 제8항에 있어서,상기 제1 데이터 셋을 획득하는 동작은,상기 단일 이미지를 입력으로 받아 깊이 맵 및 노멀 맵을 추출하는 동작; 및 상기 단일 이미지, 상기 깊이 맵 및 상기 노멀 맵을 기초로 상기 제1 데이터 셋을 구축하는 동작;을 포함하는 컴퓨팅 장치. |
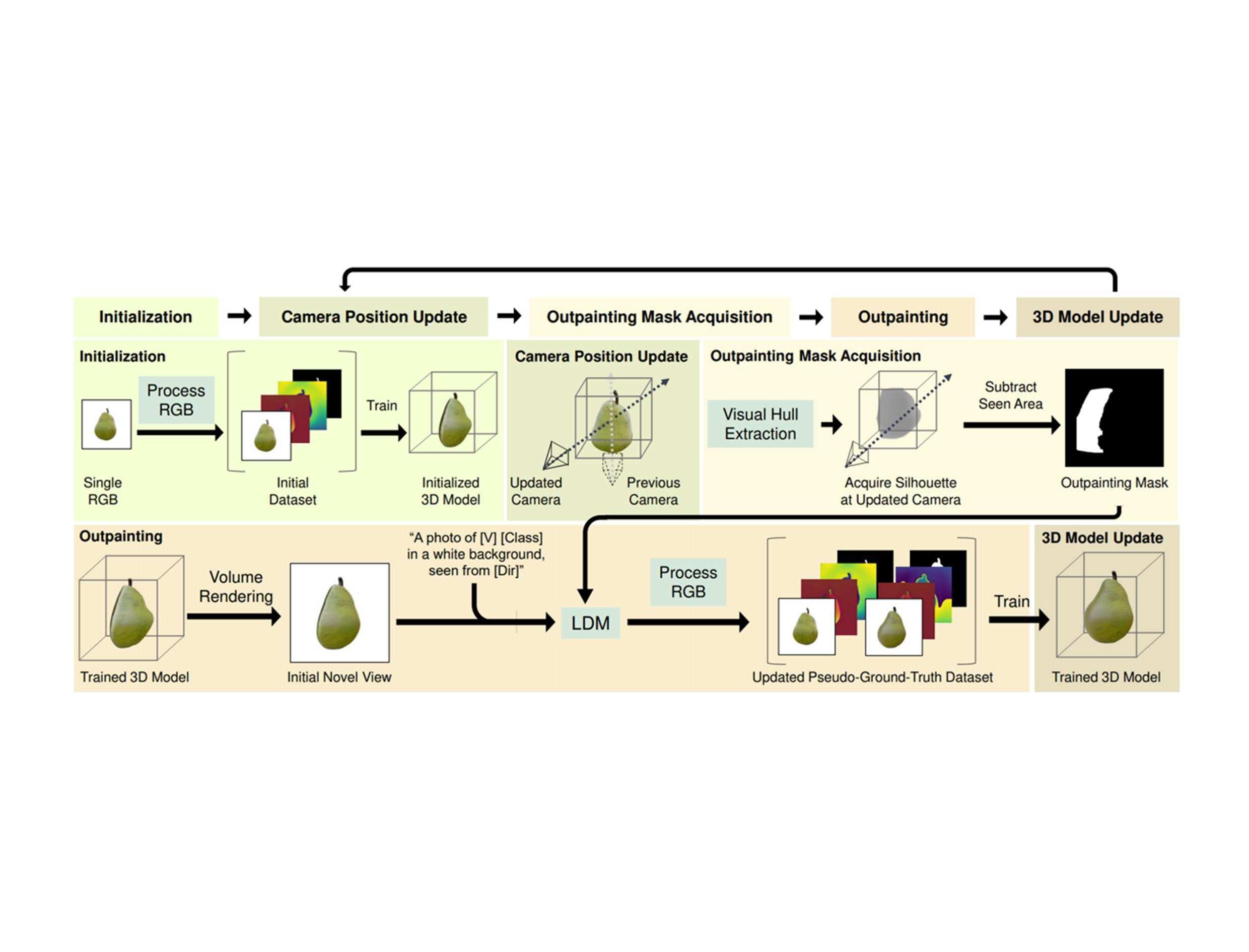
| 1 | 이미지로부터 3D 모델을 복원하기 위한 방법에 있어서, 적어도 하나의 프로세서에 의해, 단일 이미지를 전처리하여 제1 데이터 셋을 획득하는 동작;상기 제1 데이터 셋을 기초로 제1 3D 모델 - 제1 위치의 가상 카메라에 의한 제1 뷰에 대응됨 - 을 생성하는 동작;미리 정해진 카메라 스케줄을 기초로 상기 가상 카메라의 위치를 조정함으로써 시점을 변경하는 동작; 및변경된 시점에 대응되는 아웃페인팅 마스크 획득하고, 아웃페인팅 마스크를 기반으로 아웃페인팅을 수행함으로써 3D 모델을 업데이트하는 동작;을 포함하는 방법. |
| 2 | 제1항에 있어서, 상기 제1 데이터 셋을 획득하는 동작은,상기 단일 이미지를 입력으로 받아 깊이 맵 및 노멀 맵을 추출하는 동작; 및 상기 단일 이미지, 상기 깊이 맵 및 상기 노멀 맵을 기초로 상기 제1 데이터 셋을 구축하는 동작;을 포함하는 방법. |
| 3 | 제1항에 있어서, 상기 카메라 스케줄은 카메라의 이동 간격을 고려하여 최적화되는 것을 특징으로 하는 방법. |
| 4 | 제1항에 있어서, 상기 3D 모델을 업데이트하는 동작은카메라 위치의 갱신에 따른 새로운 시점에서 Visual Hull을 추출하는 동작; 및상기 Visual Hull 마스크에서 이미 관측된 영역을 제거함으로써 아웃페인팅 마스크를 획득하는 동작;을 포함하는 방법. |
| 5 | 제4항에 있어서,상기 3D 모델을 업데이트하는 동작은상기 아웃페인팅 마스크를 기반으로 Latent Diffusion Model(LDM)을 사용해 상기 새로운 시점의 이미지를 생성하는 동작; 및상기 생성된 이미지를 Pseudo-Ground-Truth 데이터셋에 추가하는 동작;을 포함하는 방법. |
| 6 | 제5항에 있어서,상기 Pseudo-Ground-Truth 데이터셋에 추가하는 동작은상기 생성된 이미지를 기초로 상기 생성된 이미지에 대응되는 기하학 정보를 추출하는 동작; 및상기 생성된 이미지 및 상기 기하학 정보를 상기 Pseudo-Ground-Truth 데이터셋에 추가하는 동작을 포함하는 방법. |
| 7 | 제6항에 있어서, 상기 기하학 정보는 물체의 거리 정보를 나타내는 깊이 맵(Depth map), 물체의 표면 기울기 정보를 나타내는 노멀 맵(normal map) 또는 객체 만을 분리한 전경 마스크(foreground mask) 중 적어도 하나를 포함하는 방법. |
| 8 | 컴퓨팅 장치에 있어서, 메모리; 및상기 메모리에 전자적으로 연결되는 적어도 하나의 프로세서;를 포함하고, 상기 적어도 하나의 프로세서는, 단일 이미지를 전처리하여 제1 데이터 셋을 획득하는 동작;상기 제1 데이터 셋을 기초로 제1 3D 모델 - 제1 위치의 가상 카메라에 의한 제1 뷰에 대응됨 - 을 생성하는 동작;미리 정해진 카메라 스케줄을 기초로 상기 가상 카메라의 위치를 조정함으로써 시점을 변경하는 동작; 및변경된 시점에 대응되는 아웃페인팅 마스크 획득하고, 아웃페인팅 마스크를 기반으로 아웃페인팅을 수행함으로써 3D 모델을 업데이트하는 동작;을 수행하도록 설정되는 컴퓨팅 장치. |
| 11 | 제8항에 있어서,상기 3D 모델을 업데이트하는 동작은카메라 위치의 갱신에 따른 새로운 시점에서 Visual Hull을 추출하는 동작; 및상기 Visual Hull 마스크에서 이미 관측된 영역을 제거함으로써 아웃페인팅 마스크를 획득하는 동작;을 포함하는 컴퓨팅 장치. |
| 12 | 제11항에 있어서,상기 3D 모델을 업데이트하는 동작은상기 아웃페인팅 마스크를 기반으로 Latent Diffusion Model(LDM)을 사용해 상기 새로운 시점의 이미지를 생성하는 동작; 및상기 생성된 이미지를 Pseudo-Ground-Truth 데이터셋에 추가하는 동작;을 포함하는 컴퓨팅 장치. |
| 13 | 제12항에 있어서,상기 Pseudo-Ground-Truth 데이터셋에 추가하는 동작은상기 생성된 이미지를 기초로 상기 생성된 이미지에 대응되는 기하학 정보를 추출하는 동작; 및상기 생성된 이미지 및 상기 기하학 정보를 상기 Pseudo-Ground-Truth 데이터셋에 추가하는 동작을 포함하는 컴퓨팅 장치. |
| 14 | 제13항에 있어서,상기 기하학 정보는 물체의 거리 정보를 나타내는 깊이 맵(Depth map), 물체의 표면 기울기 정보를 나타내는 노멀 맵(normal map) 또는 객체 만을 분리한 전경 마스크(foreground mask) 중 적어도 하나를 포함하는 컴퓨팅 장치. |