(주)아진엑스텍
이동식 협동 로봇 및 작업자 충돌 감지 방법 및 시스템
METHOD AND SYSTEM FOR DETECTING COLLISION BETWEEN MOBILE COLLABORATIVE ROBOT AND WORKER
특허 요약
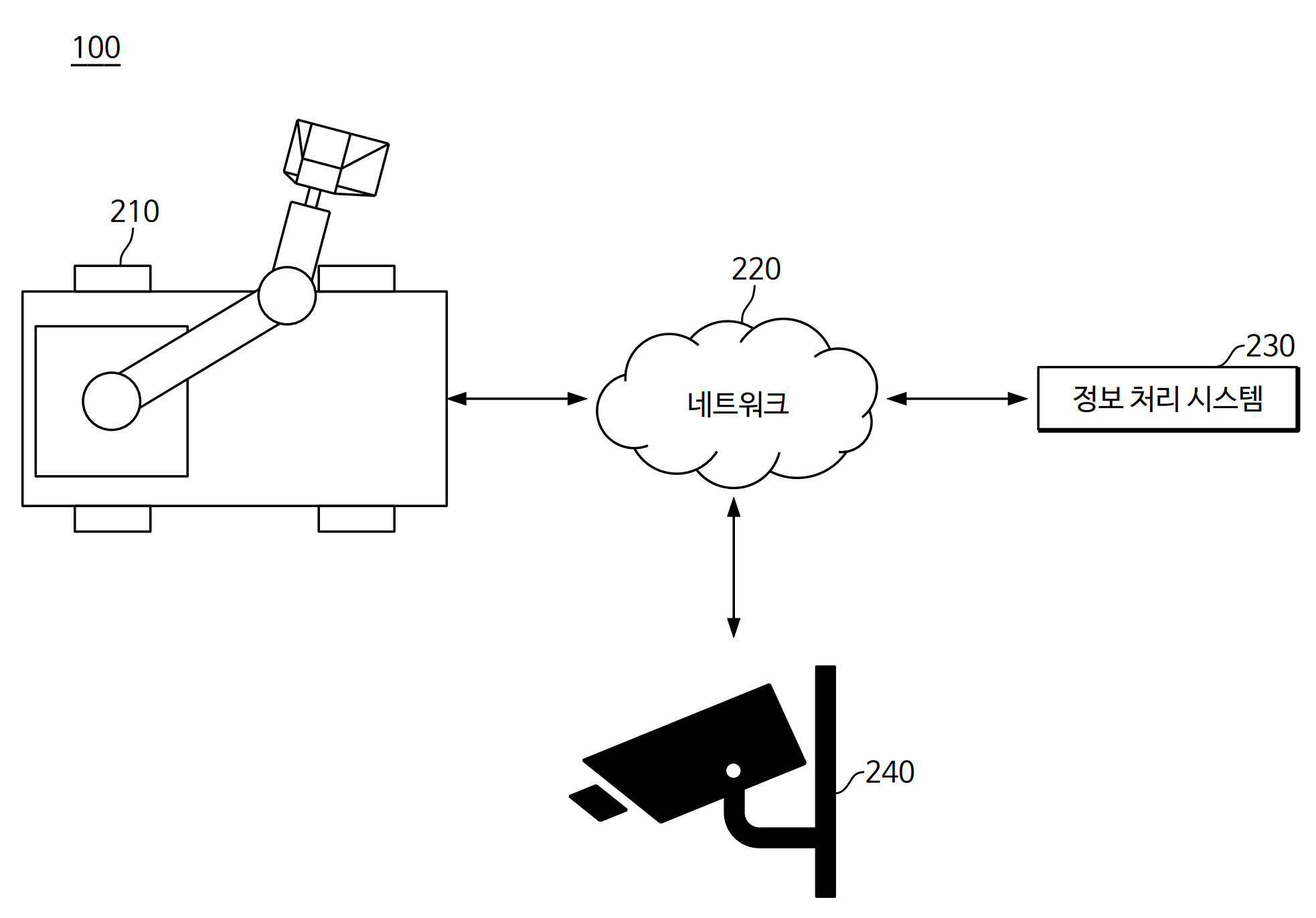
본 개시의 일 실시예에 따른 이동식 협동 로봇 및 작업자 충돌 감지 방법은, 충돌 감지 시스템의 적어도 하나의 프로세서에 의해 수행되는 로봇 및 작업자 충돌 감지 방법에 있어서, 비전 장치를 이용하여 작업 공간에서 협업하는 로봇 및 작업자를 촬영하는 단계, 촬영된 데이터에 기초하여, 작업 공간 내의 충돌 감지 영역을 이용한 로봇과 작업자의 충돌 위험을 감지하는 단계 및 로봇과 작업자의 충돌 위험이 있다고 판정하는 것에 응답하여, 로봇 제어기로 충돌 위험 신호를 전달하는 단계를 포함하고, 충돌 위험 신호는 수신하는 것에 응답하여, 로봇 제어기가 로봇을 정지시킨다.
청구항
| 번호 | 청구항 |
|---|---|
| 1 | 충돌 감지 시스템의 적어도 하나의 프로세서에 의해 수행되는 로봇 및 작업자 충돌 감지 방법에 있어서,비전 장치를 이용하여 작업 공간에서 협업하는 로봇 및 작업자를 촬영하는 단계;촬영된 데이터에 기초하여, 상기 작업 공간 내의 충돌 감지 영역을 이용한 로봇과 작업자의 충돌 위험을 감지하는 단계; 및상기 로봇과 상기 작업자의 충돌 위험이 있다고 판정하는 것에 응답하여, 로봇 제어기로 충돌 위험 신호를 전달하는 단계를 포함하고,상기 충돌 위험 신호는 수신하는 것에 응답하여, 상기 로봇 제어기가 로봇을 정지시키는, 충돌 감지 방법. |