| 번호 | 청구항 |
|---|---|
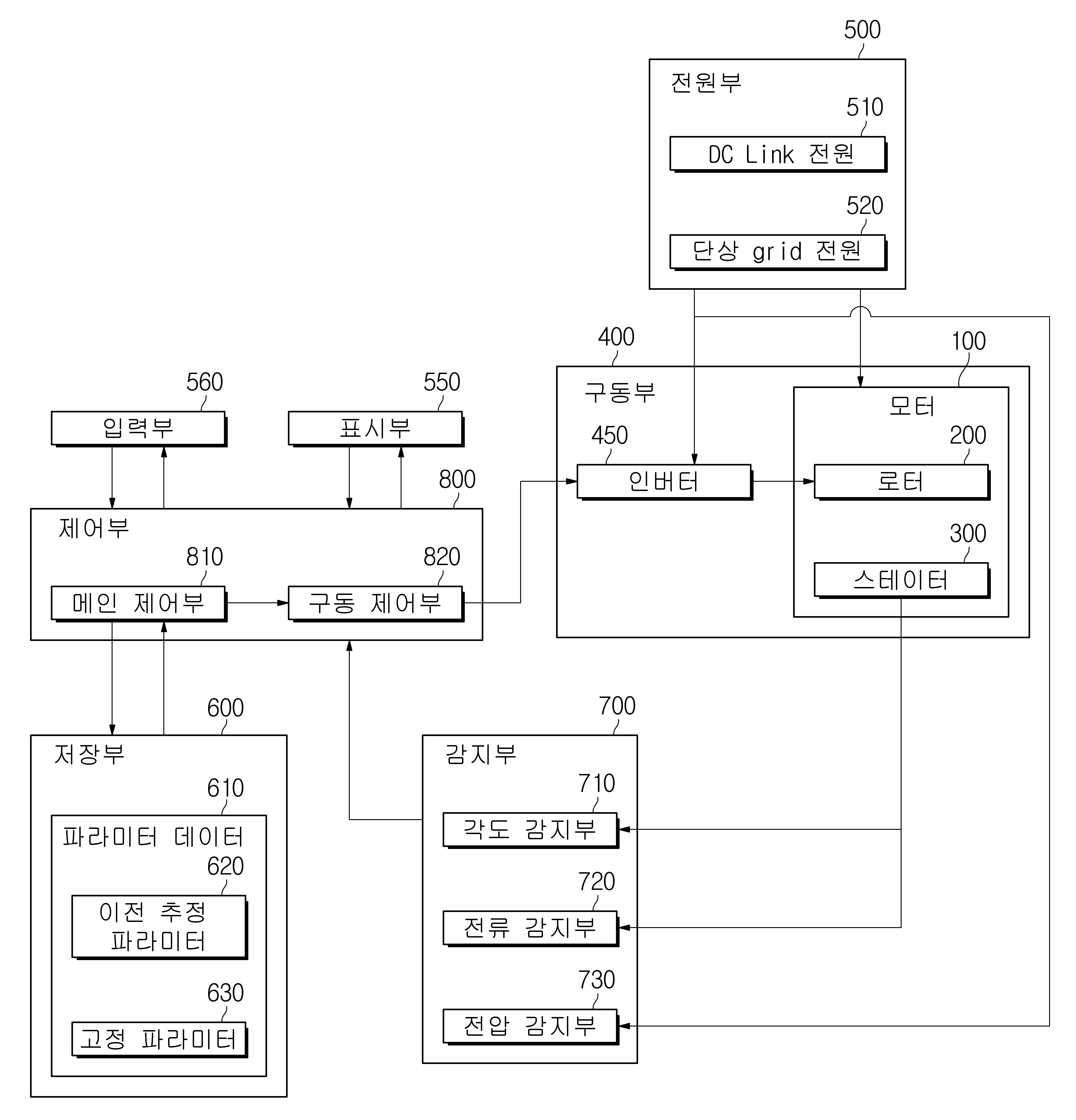
| 1 | 영구 자석을 포함하는 로터와, 스테이터를 포함하는 모터;모터에 구동 전원을 공급하는 인버터; 및미리 정해진 시간 동안 d축 시험 전류 및 q축 시험 전류를 공급하여 파라미터를 추정하고, 계단형의 합성 구형파를 구동 전류로 공급하여 상기 구동 전류의 극성에 기초하여 데드 타임을 보상하는 제어부;를 포함하되,상기 제어부는 톱니파 형태의 지령 전류를 통해 상기 구동 전류가 계단형의 합성 구형파가 되도록 상기 인버터를 제어하는 모터 구동 장치. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 제어부는 상기 로터의 위치에 기초하여 상기 톱니파 형태의 지령 전류를 생성하는 모터 구동 장치. |
| 4 | 제1항에 있어서,상기 제어부는 상기 d축 시험 전류 및 상기 q축 시험 전류가 공급되는 시간이 겹치지 않도록 상기 인버터를 제어하는 모터 구동 장치. |
| 5 | 제1항에 있어서,상기 제어부에서 추정하는 파라미터는 상저항, 역기전력 상수, d축 인덕턴스 및 q축 인덕턴스인 모터 구동 장치. |
| 6 | 제1항에 있어서,상기 제어부는 상기 로터의 토크가 미리 설정된 구동 토크 이상인 경우 상기 구동 전류가 계단형의 합성 구형파가 되도록 상기 인버터를 제어하지 않는 모터 구동 장치. |
| 7 | 제1항에 있어서,상기 제어부는 로터가 정지하고 있는 경우 기동 추정을 통해 파라미터를 추정하는 모터 구동 장치. |
| 8 | 영구 자석을 포함하는 로터와, 스테이터를 포함하는 모터;모터에 구동 전원을 공급하는 인버터; 및상기 로터의 회전 속도가 미리 설정된 기동 속도 미만인 경우 기동 추정을 통해 파라미터를 추정하고, 상기 로터의 회전 속도가 미리 설정된 기동 속도 이상이고 상기 로터의 토크가 미리 설정된 구동 토크 이하인 경우에는 데드 타임을 보상하면서 구동 추정을 통해 파라미터를 추정하고, 상기 로터의 회전 속도가 미리 설정된 기동 속도 이상이고 상기 로터의 토크가 미리 설정된 구동 토크를 초과하는 경우에는 데드 타임 보상 없이 구동 추정을 통해 파라미터를 추정하는 제어부;를 포함하는 모터 구동 장치. |
| 9 | 제8항에 있어서,상기 제어부의 기동 추정은 상기 제어부가 d축 고주파 시험 전압 및 q축 고주파 시험 전압을 공급하도록 상기 인버터를 제어하여 d축 인덕턴스, q축 인덕턴스 및 예비 상저항을 추정하는 모터 구동 장치. |
| 10 | 제9항에 있어서,상기 제어부의 기동 추정은 상기 제어부가 제 1 d축 직류 시험 전류 및 제 2 d축 직류 시험 전류를 공급하도록 상기 인버터를 제어하여 상저항을 추정하는 모터 구동 장치. |
| 11 | 제8항에 있어서,상기 제어부의 기동 추정은 상기 제어부가 q축 전류만을 공급하도록 상기 인버터를 제어하여 로터의 회전 속도가 미리 설정된 기동 속도 미만으로 제어하고, 정지 좌표계의 d축 자속 및 q축 자속을 산출하여 역기전력 상수를 추정하는 모터 구동 장치. |
| 12 | ◈청구항 12은(는) 설정등록료 납부시 포기되었습니다.◈제8항에 있어서,상기 제어부의 구동 추정은 상기 제어부가 미리 정해진 시간 동안 d축 시험 전류 및 q축 시험 전류를 공급하도록 상기 인버터를 제어하여 상저항, 역기전력 상수, d축 인덕턴스 및 q축 인덕턴스를 추정하는 모터 구동 장치. |
| 13 | ◈청구항 13은(는) 설정등록료 납부시 포기되었습니다.◈제8항에 있어서,상기 제어부의 데드 타임 보상은 상기 제어부가 구동 전류가 계단형의 합성 구형파가 되도록 상기 인버터를 제어하고, 상기 구동 전류의 극성에 기초하여 상기 데드 타임을 보상하는 모터 구동 장치. |
| 14 | ◈청구항 14은(는) 설정등록료 납부시 포기되었습니다.◈미리 정해진 시간 동안 d축 시험 전류 및 q축 시험 전류를 공급하는 단계;상기 d축 시험 전류 및 q축 시험 전류가 공급된 시간 및 공급되지 않은 시간의 d축 전류 및 q축 전류에 기초하여 파라미터를 추정하는 단계;계단형의 합성 구형파를 구동 전류로 공급하는 단계; 및상기 구동 전류의 극성에 기초하여 데드 타임을 보상하는 단계;를 포함하되,상기 구동 전류는 톱니파 형태의 지령 전류를 통해 상기 구동 전류가 계단형의 합성 구형파를 생성하는 모터 구동 장치의 제어 방법. |
| 15 | 삭제 |
| 16 | ◈청구항 16은(는) 설정등록료 납부시 포기되었습니다.◈제14항에 있어서,상기 톱니파 형태의 지령 전류는 로터의 위치에 기초하여 생성되는 모터 구동 장치의 제어 방법. |
| 17 | ◈청구항 17은(는) 설정등록료 납부시 포기되었습니다.◈제14항에 있어서,상기 d축 시험 전류 및 상기 q축 시험 전류의 공급은 공급되는 시간이 겹치지 않도록 공급하는 모터 구동 장치의 제어 방법. |
| 18 | ◈청구항 18은(는) 설정등록료 납부시 포기되었습니다.◈제14항에 있어서,상기 추정하는 파라미터는 상저항, 역기전력 상수, d축 인덕턴스 및 q축 인덕턴스인 모터 구동 장치의 제어 방법. |
| 19 | ◈청구항 19은(는) 설정등록료 납부시 포기되었습니다.◈제14항에 있어서,로터의 토크가 미리 설정된 구동 토크 이상인 경우 구동 전류를 계단형의 합성 구형파로 공급 및 데드 타임 보상을 중단하는 단계;를 더 포함하는 모터 구동 장치의 제어 방법. |
| 20 | ◈청구항 20은(는) 설정등록료 납부시 포기되었습니다.◈제14항에 있어서,로터가 정지하고 있는 경우 기동 추정을 통해 파라미터를 추정하는 단계;를 더 포함하는 모터 구동 장치의 제어 방법. |
| 21 | ◈청구항 21은(는) 설정등록료 납부시 포기되었습니다.◈로터의 회전 속도가 미리 설정된 기동 속도 미만인 경우 기동 추정을 통해 파라미터를 추정하는 단계;상기 로터의 회전 속도가 미리 설정된 기동 속도 이상이고 상기 로터의 토크가 미리 설정된 구동 토크 이하인 경우에는 데드 타임을 보상하면서 구동 추정을 통해 파라미터를 추정하는 단계; 및상기 로터의 회전 속도가 미리 설정된 기동 속도 이상이고 상기 로터의 토크가 미리 설정된 구동 토크를 초과하는 경우에는 데드 타임 보상 없이 구동 추정을 통해 파라미터를 추정하는 단계;를 포함하는 모터 구동 장치의 제어 방법. |
| 22 | ◈청구항 22은(는) 설정등록료 납부시 포기되었습니다.◈제21항에 있어서,상기 기동 추정은 d축 고주파 시험 전압 및 q축 고주파 시험 전압을 공급하여 d축 인덕턴스, q축 인덕턴스 및 예비 상저항을 추정하는 모터 구동 장치의 제어 방법. |
| 23 | ◈청구항 23은(는) 설정등록료 납부시 포기되었습니다.◈제22항에 있어서,상기 기동 추정은 제 1 d축 직류 시험 전류 및 제 2 d축 직류 시험 전류를 공급하여 상저항을 추정하는 모터 구동 장치의 제어 방법. |
| 24 | ◈청구항 24은(는) 설정등록료 납부시 포기되었습니다.◈제21항에 있어서,상기 기동 추정은 q축 전류만을 공급하여 로터의 회전 속도가 미리 설정된 기동 속도 미만이 되도록 유지하고, 정지 좌표계의 d축 자속 및 q축 자속을 산출하여 역기전력 상수를 추정하는 모터 구동 장치의 제어 방법. |
| 25 | ◈청구항 25은(는) 설정등록료 납부시 포기되었습니다.◈제21항에 있어서,상기 구동 추정은 미리 정해진 시간 동안 d축 시험 전류 및 q축 시험 전류를 공급하여 상저항, 역기전력 상수, d축 인덕턴스 및 q축 인덕턴스를 추정하는 모터 구동 장치의 제어 방법. |
| 26 | ◈청구항 26은(는) 설정등록료 납부시 포기되었습니다.◈제21항에 있어서,상기 데드 타임 보상은 계단형의 합성 구형파를 구동 전류로 공급하고, 상기 구동 전류의 극성에 기초하여 상기 데드 타임을 보상하는 모터 구동 장치의 제어 방법. |