| 번호 | 청구항 |
|---|---|
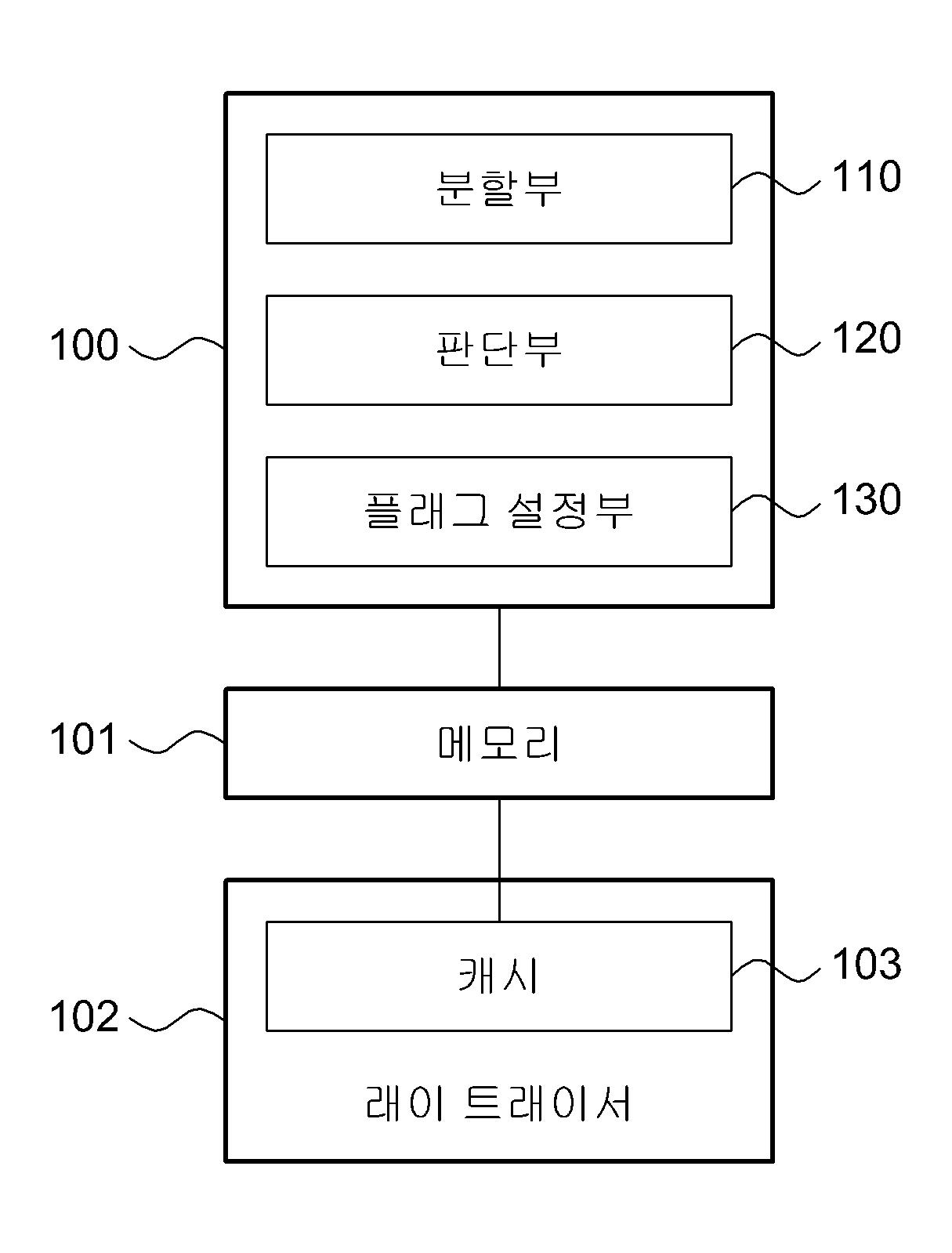
| 1 | 입력 삼차원(three dimensional; 3D) 모델에 대한 가속 구조를 생성하기 위한 영상 처리 장치에 있어서,상기 입력 3D 모델 내의 제1 공간을 복수 개의 서브 공간으로 분할하는 분할부;상기 복수 개의 서브 공간 중, 래이의 진행 경로를 포함할 확률이 더 높은 서브 공간을 상기 가속 구조 상에서 탐색 우선순위가 더 높은 자식 노드로 설정하는 판단부; 및상기 복수 개의 서브 공간 중 월드 좌표계(world coordinate system)에서 원점에 더 가까운 서브 공간과, 상기 래이의 진행 경로를 포함할 확률이 더 높은 것으로 판단된 서브 공간이 서로 동일한지의 여부를 식별하는 플래그 비트를 상기 우선순위가 더 높은 자식 노드에 추가하는 플래그 설정부를 포함하고,DFL(depth-first layout)에 기반하여 상기 탐색 우선순위가 더 높은 자식 노드 및 상기 자식 노드의 부모 노드는 메모리의 동일한 캐싱 블록 안에 배열되는, 영상 처리 장치. |
| 2 | 제1항에 있어서,상기 판단부는,상기 복수 개의 서브 공간 중, SA(Surface Area)가 더 큰 공간 구조를, 상기 래이의 진행 경로를 포함할 확률이 더 높은 서브 공간으로 판단하는, 영상 처리 장치. |
| 3 | 제1항에 있어서,상기 가속 구조는, kd-tree, BVH(Bounding Volume Hierarchy) 및 Grid 중 어느 하나의 데이터 구조(data structure)인, 영상 처리 장치. |
| 4 | 제1항에 있어서,상기 우선 순위가 높은 자식 노드는 깊이 우선 트리 탐색(depth first tree traversal)에서 우선적으로 탐색되는 왼쪽 자식 노드(left child node)인, 영상 처리 장치. |
| 5 | 삭제 |
| 6 | 제1항에 있어서,상기 분할부는,상기 제1 공간을 분할하기 위한 분할 축을 지정하고, 상기 분할 축을 따라 상기 제1 공간 내의 복수 개의 프리미티브를 정렬하여 적어도 하나의 분할면 후보를 설정하고, 상기 분할면 후보 중 SAH(surface area heuristic)에 기반한 그리디(Greedy) 알고리즘에 따라 분할면을 선정하여, 상기 분할면을 이용하여 상기 제1 공간을 상기 복수 개의 서브 공간으로 분할하는, 영상 처리 장치. |
| 7 | 제1항에 있어서,상기 분할부는, 리프 노드 생성 조건이 만족될 때까지 상기 입력 3D 모델 내에 분할되지 않은 공간에 대해 상기 분할 과정을 회귀적으로(recursively) 반복하는, 영상 처리 장치. |
| 8 | 제1항에 있어서,상기 생성된 가속 구조를 저장하는 메모리 및;상기 메모리에 저장된 가속 구조 중 적어도 일부를 이용하여 임의의 시점에서의 영상을 래이 트래이싱 기법에 의해 렌더링하는 래이 트래이서를 더 포함하는, 영상 처리 장치. |
| 9 | 입력 삼차원(three dimensional; 3D) 모델에 대한 가속 구조를 생성하기 위한 영상 처리 방법에 있어서,상기 입력 3D 모델 내의 제1 공간을 복수 개의 서브 공간으로 분할하는 단계;상기 복수 개의 서브 공간 중, 래이의 진행 경로를 포함할 확률이 더 높은 서브 공간을 상기 가속 구조 상에서 탐색 우선순위가 더 높은 자식 노드로 설정하는 단계; 및상기 복수 개의 서브 공간 중 월드 좌표계(world coordinate system)에서 원점에 더 가까운 서브 공간과, 상기 래이의 진행 경로를 포함할 확률이 더 높은 것으로 판단된 서브 공간이 서로 동일한지의 여부를 식별하는 플래그 비트를 상기 우선순위가 더 높은 자식 노드에 추가하는 플래그 설정 단계를 포함하고,DFL(depth-first layout)에 기반하여 상기 탐색 우선순위가 더 높은 자식 노드 및 상기 자식 노드의 부모 노드는 메모리의 동일한 캐싱 블록 안에 배열되는, 영상 처리 방법. |
| 10 | 제9항에 있어서,상기 탐색 우선순위가 더 높은 자식 노드를 설정하는 단계는,상기 복수 개의 서브 공간 중, SA(Surface Area)가 더 큰 공간 구조를, 상기 래이의 진행 경로를 포함할 확률이 더 높은 서브 공간으로 판단하는, 영상 처리 방법. |
| 11 | 제9항에 있어서,상기 가속 구조는, kd-tree, BVH(Bounding Volume Hierarchy) 및 Grid 중 어느 하나의 데이터 구조(data structure)인, 영상 처리 방법. |
| 12 | 제9항에 있어서,상기 우선 순위가 높은 자식 노드는 깊이 우선 트리 탐색(depth first tree traversal)에서 우선적으로 탐색되는 왼쪽 자식 노드(left child node)인, 영상 처리 방법. |
| 13 | 삭제 |
| 14 | 제9항에 있어서,상기 분할하는 단계는,상기 제1 공간을 분할하기 위한 분할 축을 지정하는 단계;상기 분할 축을 따라 상기 제1 공간 내의 복수 개의 프리미티브를 정렬하여 적어도 하나의 분할면 후보를 설정하는 단계;상기 분할면 후보 중 SAH(surface area heuristic)에 기반한 그리디(Greedy) 알고리즘에 따라 분할면을 선정하는 단계; 및상기 분할면을 이용하여 상기 제1 공간을 상기 복수 개의 서브 공간으로 분할하는 단계를 포함하는, 영상 처리 방법. |
| 15 | 제9항에 있어서,상기 분할하는 단계는, 리프 노드 생성 조건이 만족될 때까지 회귀적으로(recursively) 반복되는, 영상 처리 방법. |
| 16 | 제9항에 있어서,상기 생성된 가속 구조를 메모리에 저장하는 단계 및;상기 메모리에 저장된 가속 구조 중 적어도 일부를 이용하여 임의의 시점에서의 영상을 래이 트래이싱 기법에 의해 렌더링하는 단계를 더 포함하는, 영상 처리 방법. |
| 17 | 제9항 내지 제12항 및 제14항 내지 제16항 중 어느 한 항의 영상 처리 방법을 수행하는 프로그램을 수록한 컴퓨터 판독 가능 기록 매체. |