| 번호 | 청구항 |
|---|---|
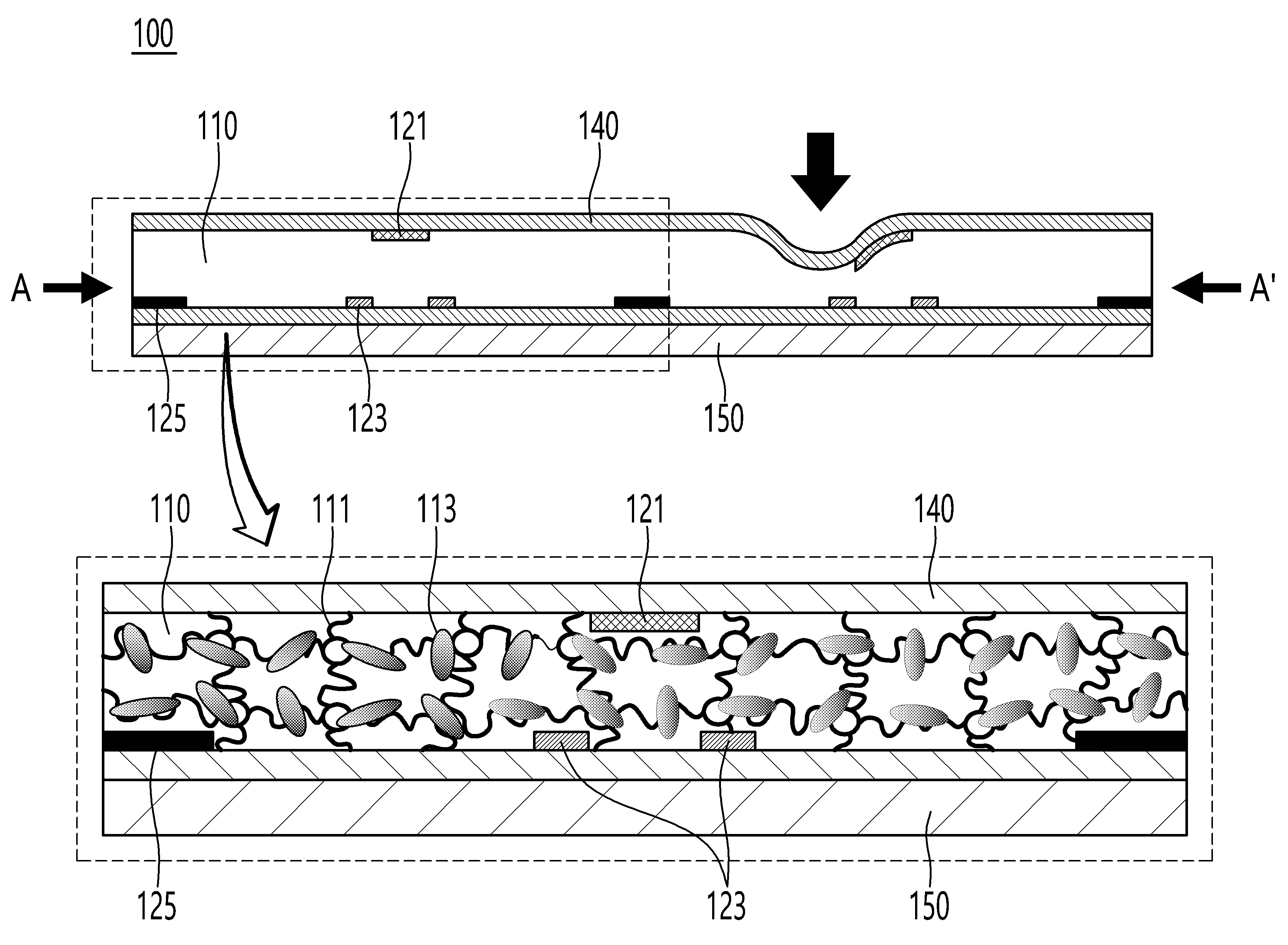
| 1 | 전하 축적 특성을 갖는 기능성 고분자로 이루어지는 변형부;상기 변형부의 일면에 형성되는 제1 전극 및 상기 변형부의 일면과 마주하는 상기 변형부의 상대면에 형성되는 제2 전극을 포함하는 전극부; 및상기 제1 전극으로의 전압 인가를 제어하고, 상기 제2 전극에서의 전압 또는 전압 변화를 감지하는 제어부;를 포함하고, 상기 전극부는 상기 변형부의 상대면에 형성되고 접지 전극으로서 기능하는 제3 전극을 더 포함하는소프트 압력 센서. |
| 2 | 제1항에 있어서, 상기 변형부의 기능성 고분자는 고분자 사슬 및 상기 고분자 사슬 사이에 배치되는 이동성 쌍극자를 포함하는, 소프트 압력 센서. |
| 3 | 제2항에 있어서, 상기 제1 전극에 전압이 인가되고 상기 변형부에 압력이 인가될 때, 상기 이동성 쌍극자의 이동 및 배향에 따라 상기 제2 전극에서 전압 변화가 발생하는, 소프트 압력 센서. |
| 4 | 제1항에 있어서, 상기 제2 전극은 복수의 전극을 포함하고, 상기 복수의 제2 전극은 상기 제1 전극을 중심으로 대칭적으로 배치되는, 소프트 압력 센서. |
| 5 | 제1항에 있어서, 상기 변형부의 내부에 돌출 구조물이 설치되는, 소프트 압력 센서. |
| 6 | 제5항에 있어서, 상기 돌출 구조물은 상기 제1 전극에 대향하여 설치되고, 상기 돌출 구조물에서 상기 제1 전극에 마주하는 면에 상기 제2 전극이 배치되는, 소프트 압력 센서. |
| 7 | 제1항에 있어서, 상기 변형부의 내부에 공극이 형성되는, 소프트 압력 센서. |
| 8 | 제1항에 있어서, 상기 제1 전극과 상기 제2 전극은 상기 변형부의 일면과 상기 변형부의 상대면에 각각 도전성 물질이 코팅되어 형성되는, 소프트 압력 센서. |
| 9 | 삭제 |
| 10 | 제1항에 있어서, 상기 제1 전극과 상기 제2 전극 사이의 수평 방향 거리는 상기 제2 전극과 상기 제3 전극 사이의 수평 방향 거리보다 작게 배치되는, 소프트 압력 센서. |
| 11 | 제1항에 있어서, 상기 전극부는 복수의 전극부 세트를 포함하고, 상기 복수의 전극부 세트 각각은 하나의 제1 전극과 복수의 제2 전극을 포함하며, 상기 복수의 전극부 세트 각각은 고강성 고분자로 둘러싸여 서로 이격 배치되는, 소프트 압력 센서. |
| 12 | 제1항에 있어서, 상기 제1 전극 또는 상기 제2 전극을 외부와 분리하기 위하여, 상기 제1 전극이 형성되는 상기 변형부의 일면 또는 상기 제2 전극이 형성되는 상기 변형부의 상대면에 배치되는 절연부를 더 포함하는 소프트 압력 센서. |
| 13 | 제1항에 있어서, 외부 장치와의 연결을 위하여, 상기 제2 전극이 형성되는 상기 변형부의 상대면에 배치되는 지지부를 더 포함하는 소프트 압력 센서. |
| 14 | 로봇용 안전 외피로서,전하 축적 특성을 갖는 기능성 고분자로 이루어지는 변형부;상기 변형부의 일면에 형성되는 제1 전극 및 상기 변형부의 일면과 마주하는 상기 변형부의 상대면에 형성되는 제2 전극을 포함하는 전극부; 및상기 제1 전극으로의 전압 인가를 제어하고, 상기 제2 전극에서의 전압 또는 전압 변화를 감지하는 제어부;를 포함하고, 상기 전극부는 상기 변형부의 상대면에 형성되고 접지 전극으로서 기능하는 제3 전극을 더 포함하는,로봇용 안전 외피. |
| 15 | 제14항에 있어서,로봇 핸드 및 로봇 암 중 적어도 하나에 장착되도록 구성되는, 로봇용 안전 외피. |