| 번호 | 청구항 |
|---|---|
| 2 | 제 1 항에서,상기 적분 영상은 상기 차량 전방 영상의 G 채널 성분에 대한 적분 영상인 것을 특징으로 하는 차선 인식 방법. |
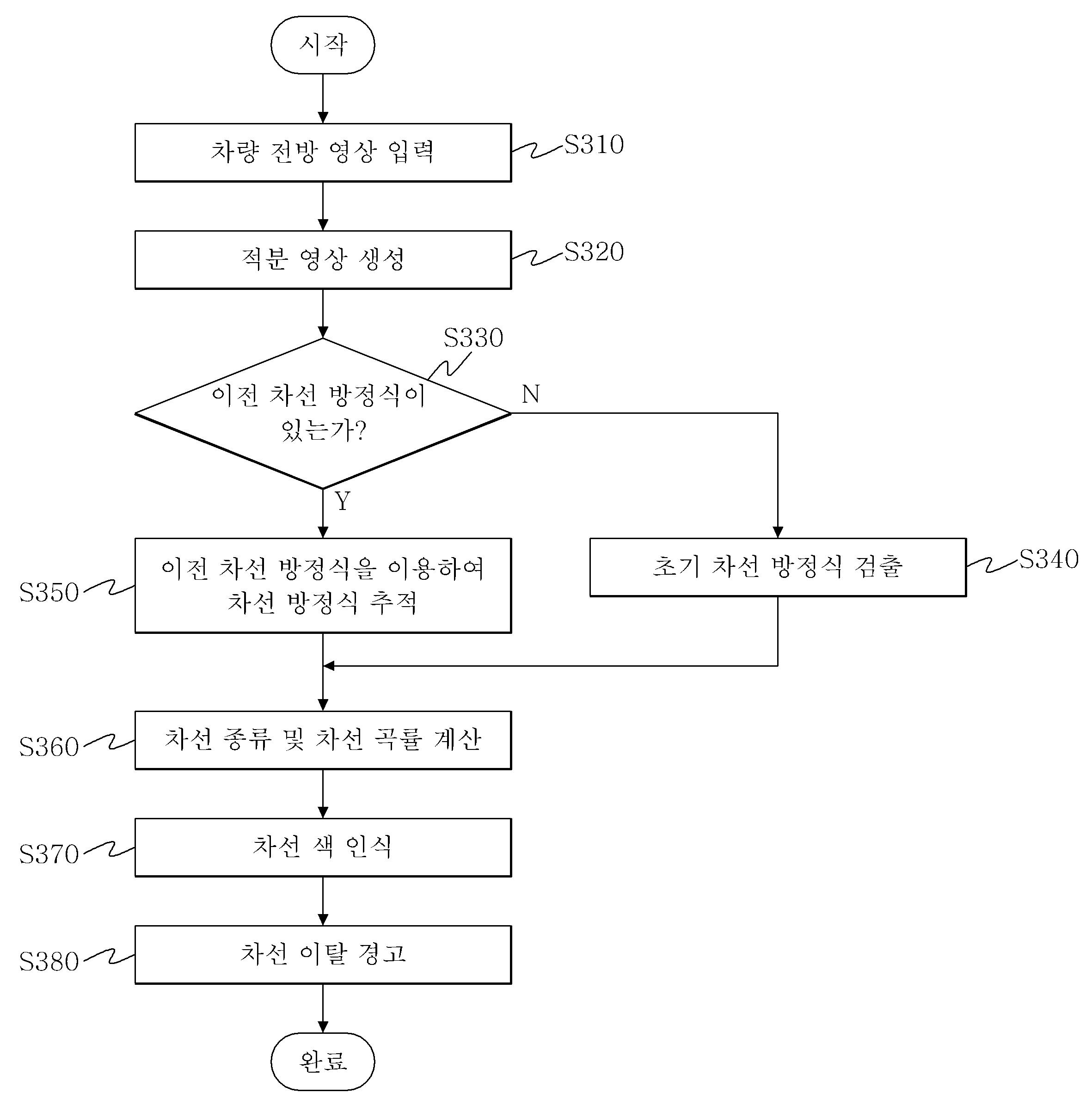
| 1 | 차량에 장착된 카메라 모듈에서 획득된 차량 전방 영상에 대해 R, G, B 컬러 성분 중에서 선택된 채널 성분에 대한 적분 영상으로 전처리하는 단계,이전 차선 방정식이 없는 경우, 상기 적분 영상과 차선 후보점 템플릿의 컨벌루션을 수행하여 차선 후보점을 추출하는 단계,상기 추출된 차선 후보점의 영상 좌표계에서의 좌표를 실제 거리 좌표계에서의 좌표로 변환한 후 클러스터링하여 구해지는 차선 후보 클러스터의 1차 차선 방정식을 구하는 단계,상기 구해진 차선 후보 클러스터 중에서 미리 정해진 조건을 만족하는 차선 후보 클러스터 쌍을 초기 검출된 차선 쌍으로 선택하는 단계, 그리고상기 선택된 차선 쌍의 실제 거리 좌표계에서의 차선 방정식을 영상 좌표계에서의 차선 방정식으로 변환하는 단계를 포함하는 것을 특징으로 하는 차선 인식 방법. |
| 3 | 제 2 항에서,이전 차선 방정식이 있는 경우, 상기 이전 차선 방정식 상에 위치하는 점에서 일정 범위 내로 관심 영역을 설정하는 단계,상기 관심 영역 내에서 상기 적분 영상과 차선 후보점 템플릿의 컨벌루션을 수행하여 차선 후보점을 추출하는 단계,상기 추출된 차선 후보점에 대해 RANSAC(RANdom Sample Concensus) 알고리즘을 이용하여 유효 차선 후보점을 선택하는 단계, 그리고상기 유효 차선 후보점을 측정값으로 하여 칼만 필터를 적용하여 상기 이전 차선 방정식을 업데이트 한 차선 방정식을 구하는 단계를 포함하는 것을 특징으로 하는 차선 인식 방법. |
| 4 | 제 3 항에서,상기 관심 영역 내에서 차선 후보점 템플릿의 컨벌루션을 수행하여 추출된 차선 후보점 중에서 대표값으로 왼쪽 차선의 관심 영역에서는 가장 오른쪽에 위치한 차선 후보점을 선택하고, 오른쪽 차선의 관심 영역에서는 가장 왼쪽에 위치한 차선 후보점을 선택하여 상기 RANSAC 알고리즘을 이용하여 유효 차선 후보점을 선택하는 것을 특징으로 하는 차선 인식 방법. |
| 5 | 제 3 항에서,상기 차선 후보점 템플릿은 좌표(u, v)에 대해 '+1'과 '-1' 값이 동일 폭(N/2)으로 연속된 스텝 함수 형태(step function)를 가지며,상기 차선 후보점 템플릿과 상기 적분 영상에 대한 컨벌루션 수행은 수학식을 이용하여 이루어지되, I(u,v)는 픽셀(u, v)에서 적분 영상의 밝기 값이고, conv_left는 좌측 차선 후보점 템플릿과 적분 영상의 컨벌루션 값이며, conv_right는 우측 차선 후보점 템플릿과 적분 영상의 컨벌루션 값이고, 상기 컨벌루션 값(conv_left, conv_right)이 임계치 이상인 좌표(u, v)를 차선 후보점으로 추출하는 것을 특징으로 하는 차선 인식 방법. |
| 6 | 제 3 항에서,상기 업데이트 된 차선 방정식을 수학식에 따라 새로운 차선 방정식으로 변경하되, bR은 상기 업데이트 된 차선 방정식에서 우측 차선 방정식의 기울기이고, bL은 상기 업데이트 된 차선 방정식에서 좌측 차선 방정식의 기울기이며, b1, b2는 미리 정해진 기울기이고, LineL', LineR'은 새로운 좌우 차선 방정식이고, LineL, LineR은 상기 업데이트 된 차선 방정식에서 좌우 차선 방정식인 것을 특징으로 하는 차선 인식 방법. |
| 7 | 제 3 항에서,상기 업데이트 된 차선 방정식이 나타내는 왼쪽 차선의 점근선과 오른쪽 차선의 점근선이 만나는 소실점의 좌표 중에서 차량의 진행 방향에 대응하는 좌표의 좌표값이 미리 설정된 최대값보다 큰 경우 최대값으로 변경하고, 미리 설정된 최소값보다 작은 경우 최소값으로 변경하는 것을 특징으로 하는 차선 인식 방법. |
| 8 | 제 3 항에서,상기 업데이트 된 차선 방정식에서 미리 정해진 간격으로 샘플링된 점을 중심으로 좌우로 일정 픽셀의 채널 밝기를 스캔하여 최대값과 최소값의 차이가 임계치 이상인 경우 상기 샘플링된 점을 차선 위의 점으로 판단하고, 상기 샘플링된 점 중에서 차선 위의 점으로 판단된 경우가 미리 정해진 기준 이하인 경우 상기 업데이트 된 차선을 점선으로 판단하는 것을 특징으로 하는 차선 인식 방법. |
| 9 | 제 3 항에서,상기 업데이트 된 차선 방정식에서 차량 전방 방향(Y축 방향)으로 상기 차량과 일정 거리 떨어진 점의 X 좌표를 계산하여, 상기 차량의 차선 이탈 여부를 판단하는 것을 특징으로 하는 차선 인식 방법. |
| 10 | 차선 위의 점을 미리 정해진 간격으로 샘플링 하는 단계,샘플링된 차선 위의 점을 중심으로 하는 소정 크기의 사각형 영역을 이용하여 차선 색 평균을 구하는 단계,상기 차선으로부터 소정 거리 떨어진 도로 영역의 점을 미리 정해진 간격으로 샘플링하는 단계,상기 샘플링된 도로 영역의 점을 중심으로 하는 소정 크기의 사각형 영역을 이용하여 도로 색 평균을 구하는 단계,상기 차선 색 평균을 정규화한 차선 색에 대한 B 채널 값과 G 채널 값 및, 상기 도로 색 평균을 정규화한 도로 색에 대한 B 채널 값과 G 채널 값을 구하는 단계, 그리고 상기 차선 색에 대한 B 채널 값과 G 채널 값 및, 상기 도로 색에 대한 B 채널 값과 G 채널 값을 조명 상황별 차선 색 데이터와 도로 색 데이터에 의해 학습된 신경망에 입력하여 차선 색을 인식하는 단계를 포함하는 것을 특징으로 하는 차선 인식 방법. |
| 11 | 차량에 장착된 카메라 모듈에서 획득된 차량 전방 영상에 대해 R, G, B 컬러 성분 중에서 선택된 채널 성분에 대한 적분 영상으로 전처리하는 전처리 영상 모듈, 그리고이전 차선 방정식이 없는 경우, 상기 적분 영상과 차선 후보점 템플릿의 컨벌루션을 수행하여 차선 후보점을 추출하고, 상기 추출된 차선 후보점의 영상 좌표계에서의 좌표를 실제 거리 좌표계에서의 좌표로 변환한 후 클러스터링하여 구해지는 차선 후보 클러스터의 1차 차선 방정식을 구하며, 상기 구해진 차선 후보 클러스터 중에서 미리 정해진 조건을 만족하는 차선 후보 클러스터 쌍을 초기 검출된 차선 쌍으로 선택하고, 상기 선택된 차선 쌍의 실제 거리 좌표계에서의 차선 방정식을 영상 좌표계에서의 차선 방정식으로 변환하는 초기 차선 검출 모듈을 포함하는 것을 특징으로 하는 차선 인식 시스템. |
| 12 | 제 11 항에서,상기 적분 영상은 상기 차량 전방 영상의 G 채널 성분에 대한 적분 영상인 것을 특징으로 하는 차선 인식 시스템. |
| 13 | 제 12 항에서,이전 차선 방정식이 있는 경우, 상기 이전 차선 방정식 상에 위치하는 점에서 일정 범위 내로 관심 영역을 설정하고, 상기 관심 영역 내에서 상기 적분 영상과 차선 후보점 템플릿의 컨벌루션을 수행하여 차선 후보점을 추출하며, 상기 추출된 차선 후보점에 대해 RANSAC(RANdom Sample Concensus) 알고리즘을 이용하여 유효 차선 후보점을 선택하고, 상기 유효 차선 후보점을 측정값으로 하여 칼만 필터를 적용하여 상기 이전 차선 방정식을 업데이트 한 차선 방정식을 구하는 차선 추적 모듈을 포함하는 것을 특징으로 하는 차선 인식 시스템. |
| 14 | 제 13 항에서,상기 관심 영역 내에서 차선 후보점 템플릿의 컨벌루션을 수행하여 추출된 차선 후보점 중에서 대표값으로 왼쪽 차선의 관심 영역에서는 가장 오른쪽에 위치한 차선 후보점을 선택하고, 오른쪽 차선의 관심 영역에서는 가장 왼쪽에 위치한 차선 후보점을 선택하여 상기 RANSAC 알고리즘을 이용하여 유효 차선 후보점을 선택하는 것을 특징으로 하는 차선 인식 시스템. |
| 15 | 제 13 항에서,상기 차선 후보점 템플릿은 좌표(u, v)에 대해 '+1'과 '-1' 값이 동일 폭(N/2)으로 연속된 스텝 함수 형태(step function)를 가지며,상기 차선 후보점 템플릿과 상기 적분 영상에 대한 컨벌루션 수행은 수학식을 이용하여 이루어지되, I(u,v)는 픽셀(u, v)에서 적분 영상의 밝기 값이고, conv_left는 좌측 차선 후보점 템플릿과 적분 영상의 컨벌루션 값이며, conv_right는 우측 차선 후보점 템플릿과 적분 영상의 컨벌루션 값이고, 상기 컨벌루션 값(conv_left, conv_right)이 임계치 이상인 좌표(u, v)를 차선 후보점으로 추출하는 것을 특징으로 하는 차선 인식 시스템. |
| 16 | 제 13 항에서,상기 업데이트 된 차선 방정식을 수학식에 따라 새로운 차선 방정식으로 변경하되, bR은 상기 업데이트 된 차선 방정식에서 우측 차선 방정식의 기울기이고, bL은 상기 업데이트 된 차선 방정식에서 좌측 차선 방정식의 기울기이며, b1, b2는 미리 정해진 기울기이고, LineL', LineR'은 새로운 좌우 차선 방정식이고, LineL, LineR은 상기 업데이트 된 차선 방정식에서 좌우 차선 방정식인 것을 특징으로 하는 차선 인식 시스템. |
| 17 | 제 13 항에서,상기 업데이트 된 차선 방정식이 나타내는 왼쪽 차선의 점근선과 오른쪽 차선의 점근선이 만나는 소실점의 좌표 중에서 차량의 진행 방향에 대응하는 좌표의 좌표값이 미리 설정된 최대값보다 큰 경우 최대값으로 변경하고, 미리 설정된 최소값보다 작은 경우 최소값으로 변경하는 것을 특징으로 하는 차선 인식 시스템. |
| 18 | 제 13 항에서,상기 업데이트 된 차선 방정식에서 미리 정해진 간격으로 샘플링된 점을 중심으로 좌우로 일정 픽셀의 채널 밝기를 스캔하여 최대값과 최소값의 차이가 임계치 이상인 경우 상기 샘플링된 점을 차선 위의 점으로 판단하고, 상기 샘플링된 점 중에서 차선 위의 점으로 판단된 경우가 미리 정해진 기준 이하인 경우 상기 업데이트 된 차선을 점선으로 판단하는 차선 종류 인식 모듈을 더 포함하는 것을 특징으로 하는 차선 인식 시스템. |
| 19 | 제 13 항에서,상기 업데이트 된 차선 방정식에서 차량 전방 방향(Y축 방향)으로 상기 차량과 일정 거리 떨어진 점의 X 좌표를 계산하여, 상기 차량의 차선 이탈 여부를 판단하고 경고하는 차선 이탈 경고 모듈을 더 포함하는 것을 특징으로 하는 차선 인식 시스템. |
| 20 | 차선 위의 점을 미리 정해진 간격으로 샘플링 하고, 샘플링된 차선 위의 점을 중심으로 하는 소정 크기의 사각형 영역을 이용하여 차선 색 평균을 구하며, 상기 차선으로부터 소정 거리 떨어진 도로 영역의 점을 미리 정해진 간격으로 샘플링하고, 상기 샘플링된 도로 영역의 점을 중심으로 하는 소정 크기의 사각형 영역을 이용하여 도로 색 평균을 구하며, 상기 차선 색 평균을 정규화한 차선 색에 대한 B 채널 값과 G 채널 값 및, 상기 도로 색 평균을 정규화한 도로 색에 대한 B 채널 값과 G 채널 값을 구하고, 상기 차선 색에 대한 B 채널 값과 G 채널 값 및, 상기 도로 색에 대한 B 채널 값과 G 채널 값을 조명 상황별 차선 색 데이터와 도로 색 데이터에 의해 학습된 신경망에 입력하여 차선 색을 인식하는 차선색 인식 모듈을 포함하는 것을 특징으로 하는 차선 인식 시스템. |