| 번호 | 청구항 |
|---|---|
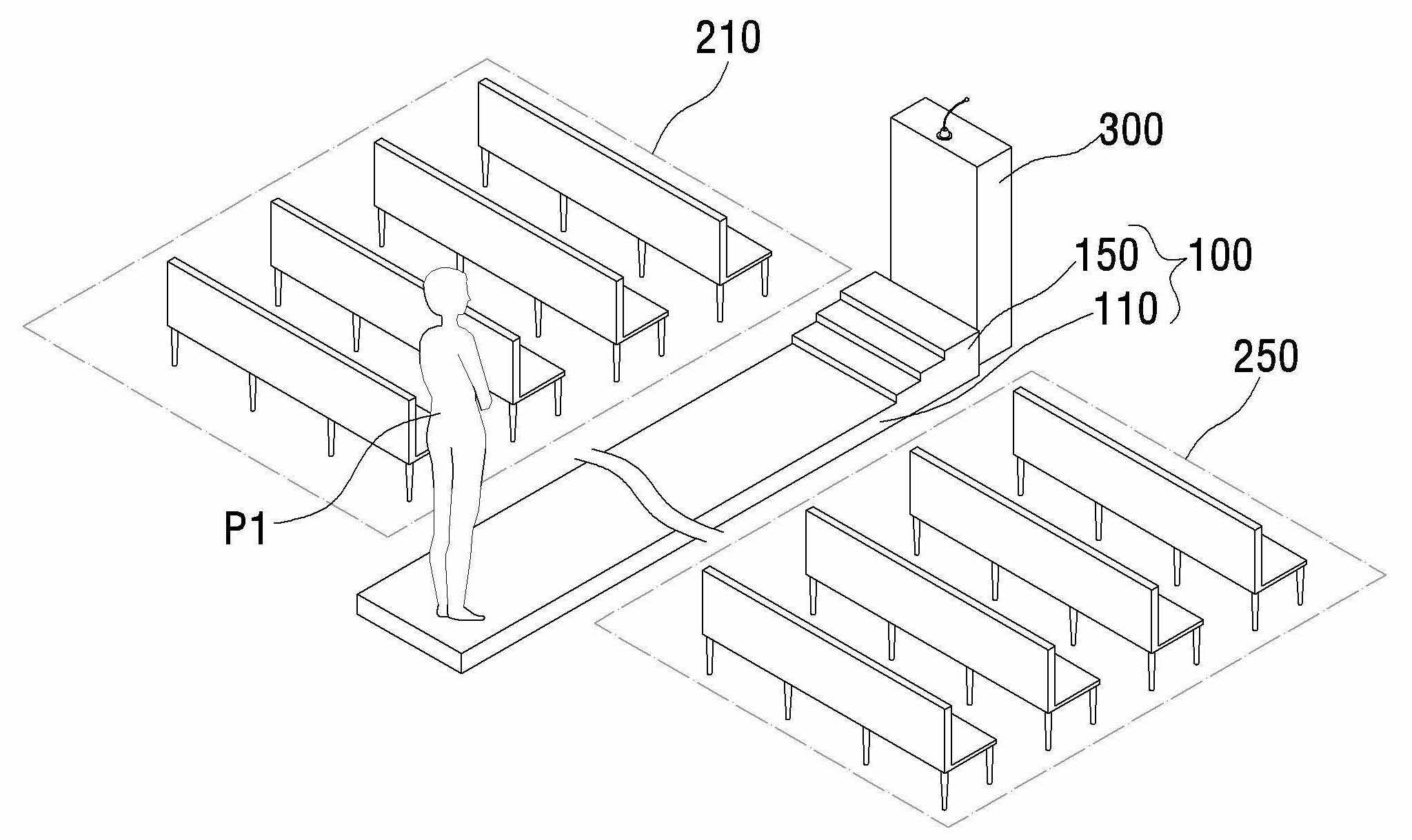
| 1 | 신랑이 입장하는 중앙 워킹 플로어;상기 중앙 워킹 플로어의 전방에 위치한 주례석; 상기 중앙 워킹 플로어의 일측에 위치한 제1 하객석; 및상기 중앙 워킹 플로어의 타측에 위치한 제2 하객석을 포함하고,상기 중앙 워킹 플로어는 상기 신랑이 입장하여 걸어가도록 제1 방향을 따라 연장된 메인 워킹 플로어와,상기 메인 워킹 플로어와 상기 주례석 사이에 위치하고 상기 신랑이 상기 메인 워킹 플로어의 단부로부터 상기 주례석까지 올라가도록 제공된 계단식 플로어를 포함하며,상기 메인 워킹 플로어는 자동화 시스템으로 구성되고,상기 메인 워킹 플로어는 상기 메인 워킹 플로어의 몸체를 이루는 바디부, 상기 바디부 내에 위치하고 상기 제1 방향을 따라 이격되어 배치되며 상기 바디부가 무빙되도록 특정 방향으로 회전하는 복수의 롤러들을 포함하는 롤러부, 및 상기 롤러부의 회전 방향을 제어하는 제어부를 포함하고,상기 메인 워킹 플로어는 상기 바디부의 전면(Whole surface)을 둘러싸며, 상기 신랑이 입장하여 걸어가도록 상기 바디부의 표면을 평탄화시키는 평탄부를 더 포함하며,상기 신랑은 상기 메인 워킹 플로어 상에 올라간 후, 스스로 걷지 않는 제1 경우에서, 제1 속력(V1)을 갖고 무빙하는 상기 바디부 및 상기 평탄부에 의해 제1 방향을 따라 상기 신랑은 무빙하고,제1 속력(V1)은 상기 메인 워킹 플로어의 메모리부에 저장되고,상기 제1 속력(V1)은 상기 신랑의 미리 정해진 속력값으로 상기 메모리부에 미리 저장되고,상기 신랑이 상기 제1 속력(V1)보다 작은 제2 속력(V2)으로 걷는 제2 경우에서, 상기 바디부 및 상기 평탄부는 제1 속력(V1')으로 무빙하고 상기 신랑은 상기 제2 속력(V2) 및 상기 제1 속력(V1')의 합에 의해 상기 제1 방향을 따라 무빙하고,상기 제2 속력(V2)은 결혼 예식 전에 미리 측정되고, 상기 제1 속력(V1')은 결혼 예식 전에 미리 측정된 상기 제2 속력(V2)을 기초로 산출되고,제2 속력(V2)과 제1 속력(V1')의 합은 제1 속력(V1)과 동일하고,상기 신랑(P1)이 상기 메인 워킹 플로어 상에 올라간 후, 상기 제1 방향을 따라 제2 속력(V2')으로 워킹하는 제3 경우에서,상기 제2 속력(V2')은 상기 제1 속력(V1)보다 크고,상기 바디부 및 상기 평탄부는 상기 제1 방향과 반대방향의 제2 방향으로 제1 속력(V1'')으로 무빙하고 상기 신랑은 상기 제2 속력(V2') 및 상기 제1 속력(V1'')의 합에 의해 상기 제1 방향을 따라 무빙하고,상기 제2 속력(V2')은 결혼 예식 전에 미리 측정되고, 상기 제2 방향의 상기 제1 속력(V1'')은 결혼 예식 전에 미리 측정된 상기 제2 속력(V2')을 기초로 산출되고,상기 제1 방향은 예식장 입구로부터 상기 주례석을 향하는 방향이고, 상기 제2 방향은 상기 주례석으로부터 상기 예식장 입구를 향하는 방향이고,상기 신랑은 상기 제3 경우에서, 상기 제1 방향의 제2 속력(V2')과 상기 제2 방향의 제1 속력(V1'')의 합인 속력값으로 상기 제1 방향을 따라 무빙하고,상기 메인 워킹 플로어는 부가장치부를 더 포함하고,상기 부가장치부는 촬상부, 통신부, 및 부가제어부를 포함하고,상기 촬상부는 상기 제1 하객석 및 상기 제2 하객석을 각각 촬상하거나, 하객들의 축하 소리를 녹음하고,상기 부가제어부는 상기 촬상부에 의해 판단된 하객들의 상기 신랑의 입장 시 하객들의 반응 정도에 따라 상기 메인 워킹 플로어의 상기 바디부 및 상기 평탄부의 속력을 제어하고, 상기 부가제어부는 상기 촬상부에 의해 판단된 하객들의 상기 신랑의 입장 시 하객들의 반응이 좋은 경우, 상기 메인 워킹 플로어의 상기 바디부 및 상기 평탄부의 속력을 상기 제2 속력(V2'')으로 롤러들이 회전하도록 상기 롤러부를 제어하기 위해 상기 제2 속력(V2'')의 정보를 상기 통신부를 통해 상기 제어부에 제공하고,상기 부가장치부는 속력검출부를 더 포함하고,상기 속력검출부는 상기 촬상부를 통해 촬영된 상기 신랑의 걸음 속력(걸음 거리(d)를 측정 시간으로 나눈 값)을 측정하고,상기 부가제어부는 측정된 상기 신랑의 걸음 속력(걸음 거리(d)를 측정 시간으로 나눈 값)을 상기 통신부를 통해 상기 제어부에 제공하고,상기 제어부는 측정된 상기 신랑의 걸음 속력(걸음 거리(d)를 측정 시간으로 나눈 값)을 기초로 상기 바디부 및 상기 평탄부의 속력(상기 제1 방향의 속력 또는 상기 제2 방향의 속력)을 계산하고,상기 바디부 및 상기 평탄부의 속력(상기 제1 방향의 속력 또는 상기 제2 방향의 속력)은 상기 제1 속력(V1)과 측정된 상기 신랑의 걸음 속력(걸음 거리(d)를 측정 시간으로 나눈 값)을 고려하여 계산되고,상기 메인 워킹 플로어는 심박수모듈장치를 더 포함하고,상기 심박수모듈장치는 상기 평탄부 내에 삽입되고,상기 심박수모듈장치는 심박수측정부, 및 모듈통신부를 포함하고,상기 심박수모듈장치의 표면은 상기 평탄부의 표면과 같은 선상에 위치하고,상기 신랑은 상기 메인 워킹 플로어 상에 올라간 후, 아직 워킹하지 않은 상태에서 상기 심박수모듈장치 상에 위치하여 상기 심박수모듈장치의 표면을 직접 밟고,상기 신랑의 심박수는 상기 심박수측정부에 의해 측정되고, 상기 측정된 심박수는 상기 모듈통신부에 의해 상기 제어부에 제공되는, 예식장 자동화 시스템. |
| 1 | 삭제 |
| 1 | 삭제 |