| 번호 | 청구항 |
|---|---|
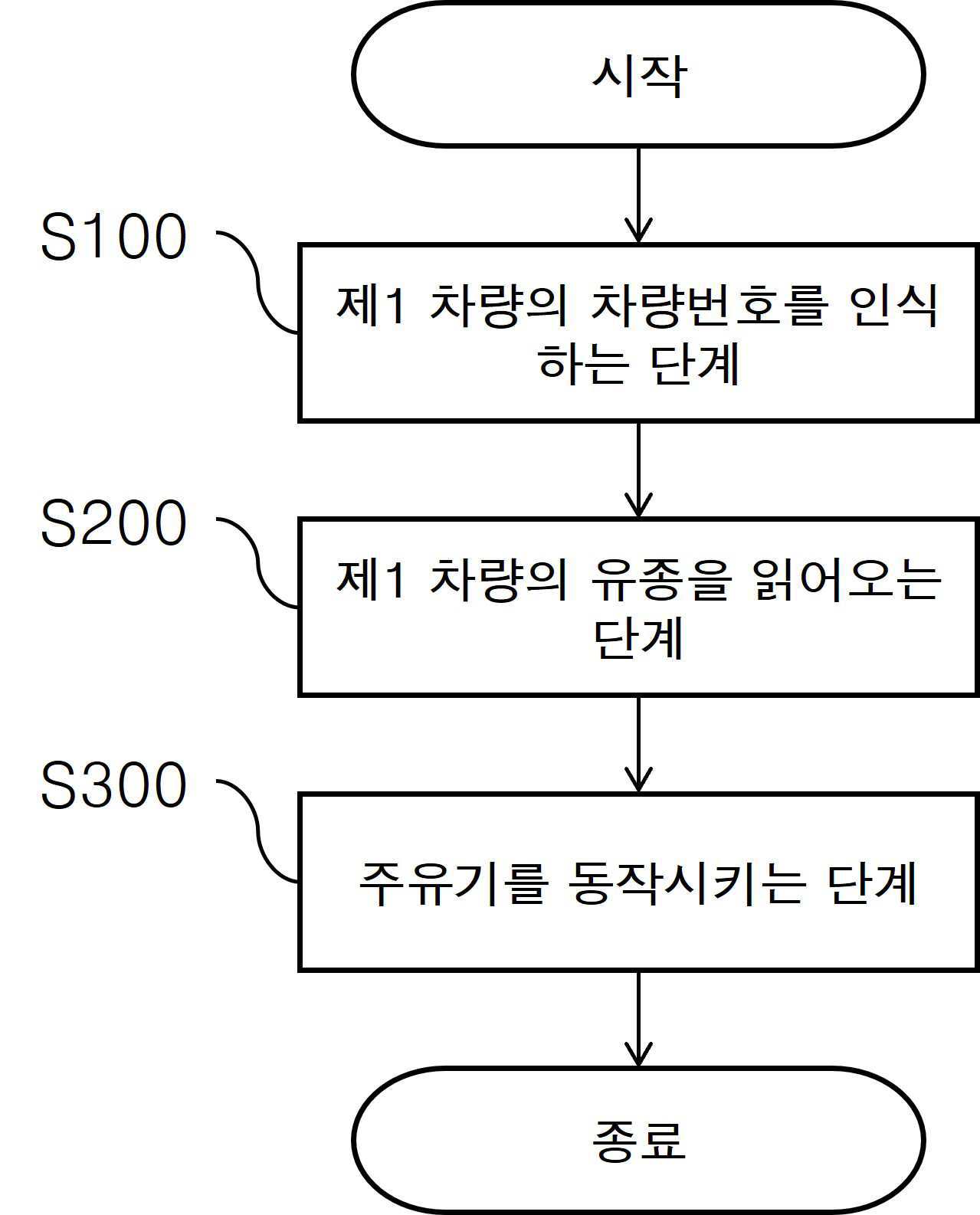
| 1 | 장치에 프로세서, 메모리, 통신모듈 및 비일시적 저장매체가 포함되어 있고, 상기 비일시적 저장매체에 저장된 프로그램을 실행하여 상기 프로세서에 의해 수행되는, 차량 식별 정보를 활용한 주유기 연동 차량 별 혼유 사고 방지 방법에 있어서,주유소 일측에 설치된 카메라에서 촬영된 영상을 기반으로, 주유소에 진입하는 제1 차량의 차량번호를 인식하는 단계;상기 제1 차량의 차량번호를 기반으로, 상기 제1 차량의 유종을 읽어오는 단계; 및상기 제1 차량의 유종을 기반으로, 주유기를 동작시키는 단계;를 포함하고,상기 주유기를 동작시키는 단계는: 상기 제1 차량의 유종을 디스플레이에 표기하는 단계; 및 상기 제1 차량의 유종에 대응하는 기름을 공급하는 단계;를 포함하고,상기 제1 차량의 차량번호를 기반으로, 상기 제1 차량의 주유구 방향을 읽어오는 단계;상기 제1 차량의 주유구 방향을 기반으로, 상기 주유소의 지면에 설치된 진행 경로 안내등을 점등시키는 단계;상기 카메라에서 촬영된 영상을 기반으로, 상기 제1 차량의 오염도를 산출하는 단계;상기 제1 차량의 차량번호를 기반으로, 세차 이력을 읽어오는 단계;상기 제1 차량의 오염도 및 세차 이력을 기반으로, 제1 차량의 세차 의사를 예측하는 단계;상기 제1 차량의 세차 의사를 기반으로, 상기 주유소의 지면에 설치된 진행 경로 안내등을 점등시키는 단계; 및상기 진행 경로 안내등이 점등되고 소정의 시간이 경과한 후, 상기 진행 경로 안내등을 소등시키는 단계;를 더 포함하고,상기 진행 경로 안내등은: 상기 주유소의 진입로부터 주유기의 좌측 정차 지점까지를 잇는 제1-1 유도차선; 상기 주유소의 진입로부터 주유기의 우측 정차 지점까지를 잇는 제1-2 유도차선; 상기 주유소의 진입로부터 세차 장치까지를 잇는 제2 유도차선; 상기 제1-1 유도차선을 따라 소정의 간격마다 배치되며, 제1-1 색상 및 제1-2 색상 중 어느 한 색상이 선택적으로 점등 가능한 제1-1 조명부; 상기 제1-2 유도차선을 따라 소정의 간격마다 배치되며, 제1-1 색상 및 제1-2 색상 중 어느 한 색상이 선택적으로 점등 가능한 제1-2 조명부; 및 상기 제2 유도차선을 따라 소정의 간격마다 배치되며, 제2 색상으로 점등 가능한 제2 조명부;를 포함하되, 상기 제1-1 색상은 노란색이고, 상기 제1-2 색상은 초록색이며,상기 제1 차량의 주유구 방향을 기반으로, 상기 주유소의 지면에 설치된 진행 경로 안내등을 점등시키는 단계는: 상기 제1 차량의 주유구 방향이 오른쪽인 경우: 상기 제1-1 조명부를 점등시키는 단계; 및 상기 제1 차량의 주유구 방향이 왼쪽인 경우: 상기 제1-2 조명부를 점등시키는 단계;를 포함하고,상기 제1 차량의 세차 의사를 기반으로, 상기 주유소의 지면에 설치된 진행 경로 안내등을 점등시키는 단계는: 상기 제1 차량의 세차 의사가 있는 것으로 판정된 경우: 상기 제2 조명부를 점등시키는 단계;를 포함하고,상기 제1-1 조명부를 점등시키는 단계는: 상기 제1 차량의 유종이 가솔린인 경우: 상기 제1-1 조명부를 제1-1 색상으로 점등시키는 단계; 및 상기 제1 차량의 유종이 디젤인 경우: 상기 제1-1 조명부를 제1-2 색상으로 점등시키는 단계;를 포함하고,상기 제1-2 조명부를 점등시키는 단계는: 상기 제1 차량의 유종이 가솔린인 경우: 상기 제1-2 조명부를 제1-1 색상으로 점등시키는 단계; 및 상기 제1 차량의 유종이 디젤인 경우: 상기 제1-2 조명부를 제1-2 색상으로 점등시키는 단계;를 포함하고,상기 제1 차량의 오염도를 산출하는 단계는: 상기 카메라에서 촬영된 영상으로부터, 차량 객체를 인식하는 단계; 상기 차량 객체로부터, 보닛(bonnet) 객체를 인식하는 단계; 상기 보닛 객체의 이미지를 추출하는 단계; 상기 보닛 객체의 이미지로부터, 픽셀별 색상코드를 읽어오는 단계; 상기 픽셀별 색상코드를 기반으로, 색상코드별 픽셀 수를 산출하는 단계; 상기 색상코드별 픽셀 수가 최댓값인 제3 색상코드를 추출하는 단계; 상기 보닛 객체의 이미지로부터, 상기 제3 색상코드의 인접 색상인 제4 색상코드들을 추출하는 단계; 상기 보닛 객체의 이미지로부터 상기 제3 색상코드 및 제4 색상코드에 대응하는 픽셀들을 삭제한 오염부분 이미지를 생성하는 단계; 및 '상기 오염부분 이미지의 총 픽셀 수 / 상기 보닛 객체의 이미지에 포함된 총 픽셀 수'를 산출하여 상기 제1 차량의 오염도로 지정하는 단계;를 포함하고,상기 보닛 객체의 이미지로부터, 상기 제3 색상코드의 인접 색상인 제4 색상코드들을 추출하는 단계는: 상기 보닛 객체의 이미지로부터, 상기 제3 색상코드의 Red, Green 및 Blue 각각에 대해 ±3 범위에 포함되는 제5-1 색상코드를 추출하는 단계; 상기 제5-1 색상코드에 대응하는 총 픽셀 수가 상기 제3 색상코드에 대응하는 총 픽셀 수의 제1 비율 이상인 경우: 상기 제5-1 색상코드를 제4 색상코드에 추가하는 단계; 상기 보닛 객체의 이미지로부터, 상기 제3 색상코드의 Red, Green 및 Blue 각각에 대해 ±6 범위에 포함되는 제5-2 색상코드를 추출하는 단계; 상기 제5-2 색상코드에 대응하는 총 픽셀 수가 상기 제3 색상코드에 대응하는 총 픽셀 수의 제2 비율 이상인 경우: 상기 제5-2 색상코드를 제4 색상코드에 추가하는 단계; 상기 보닛 객체의 이미지로부터, 상기 제3 색상코드의 Red, Green 및 Blue 각각에 대해 ±9 범위에 포함되는 제5-3 색상코드를 추출하는 단계; 상기 제5-3 색상코드에 대응하는 총 픽셀 수가 상기 제3 색상코드에 대응하는 총 픽셀 수의 제3 비율 이상인 경우: 상기 제5-3 색상코드를 제4 색상코드에 추가하는 단계; 상기 보닛 객체의 이미지로부터, 상기 제3 색상코드의 Red, Green 및 Blue 각각에 대해 ±15 범위에 포함되는 제5-4 색상코드를 추출하는 단계; 상기 제5-4 색상코드에 대응하는 총 픽셀 수가 상기 제3 색상코드에 대응하는 총 픽셀 수의 제4 비율 이상인 경우: 상기 제5-4 색상코드를 제4 색상코드에 추가하는 단계; 상기 보닛 객체의 이미지로부터, 상기 제3 색상코드의 Red, Green 및 Blue 각각에 대해 ±18 범위에 포함되는 제5-5 색상코드를 추출하는 단계; 상기 제5-5 색상코드에 대응하는 총 픽셀 수가 상기 제3 색상코드에 대응하는 총 픽셀 수의 제5 비율 이상인 경우: 상기 제5-5 색상코드를 제4 색상코드에 추가하는 단계; 상기 보닛 객체의 이미지로부터, 상기 제3 색상코드의 Red, Green 및 Blue 각각에 대해 ±21 범위에 포함되는 제5-6 색상코드를 추출하는 단계; 및 상기 제5-6 색상코드에 대응하는 총 픽셀 수가 상기 제3 색상코드에 대응하는 총 픽셀 수의 제6 비율 이상인 경우: 상기 제5-6 색상코드를 제4 색상코드에 추가하는 단계;를 포함하는,차량 식별 정보를 활용한 주유기 연동 차량 별 혼유 사고 방지 방법 |
| 1 | 삭제 |
| 1 | 삭제 |