| 번호 | 청구항 |
|---|---|
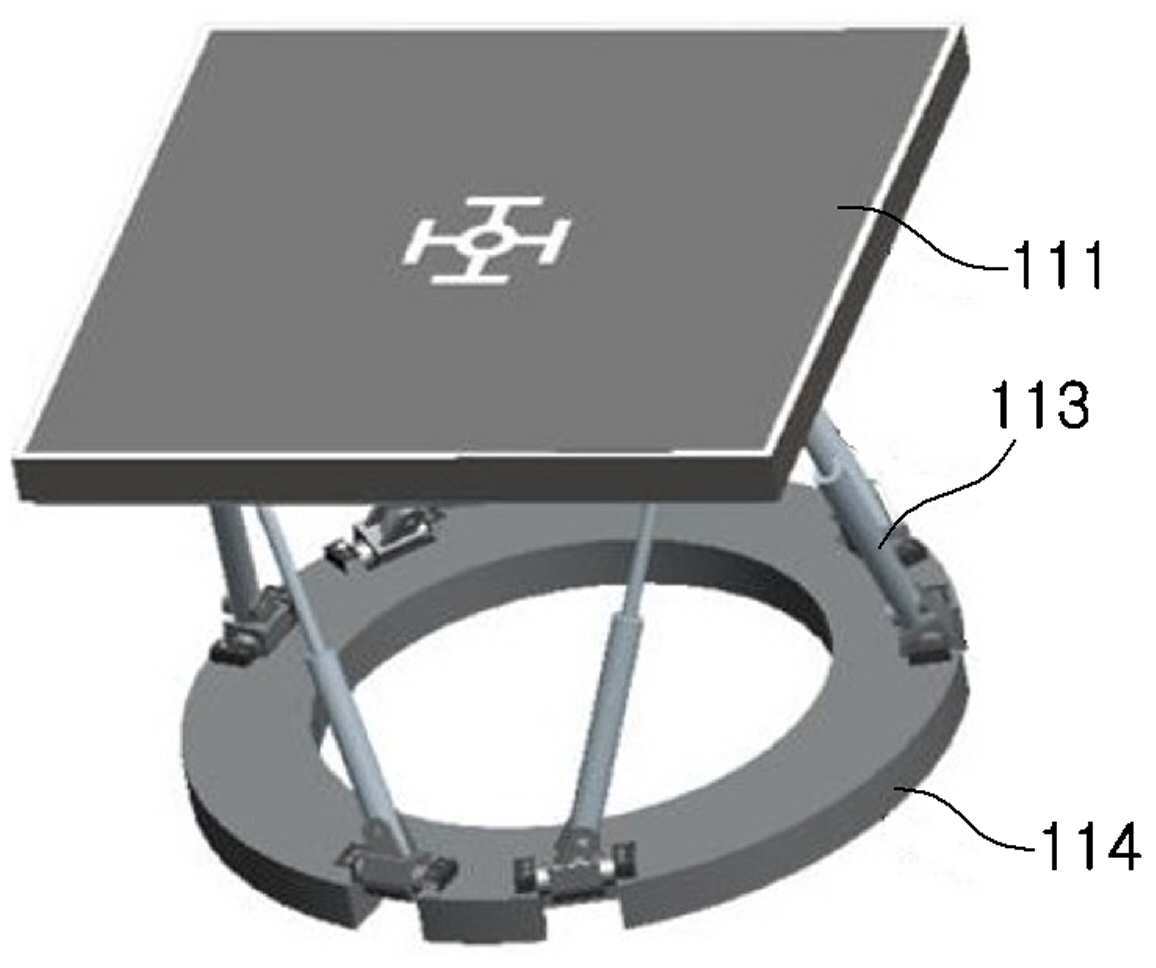
| 1 | eVTOL(electric vertical take-off and landing)이 안착되는 상부 구조물, 건축물 연결부 및 상기 상부 구조물의 움직임을 상기 건축물 연결부와 분리하는 6개의 서스펜션을 포함하는 이착륙 패드 구조물의 제어 장치가 수행하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 방법에 있어서,상기 eVTOL이 착륙을 준비하면, 상기 eVTOL로부터 eVTOL 정보를 수신하는 단계;상기 수신된 eVTOL 정보를 이용하여, 상기 eVTOL이 터치다운하면 상기 이착륙 패드 구조물에 가해지는 충격중량을 예측하는 단계;상기 예측된 충격중량에 따라 상기 서스펜션에 요구되는 제1 스프링 강성 및 제1 댐퍼 감쇠를 계산하는 단계; 및상기 계산된 제1 스프링 강성 및 제1 댐퍼 감쇠로 상기 서스펜션의 스프링 강성 및 댐퍼 감쇠를 설정하여 상기 서스펜션을 제어하는 단계를 포함하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 방법. |
| 2 | 제1항에 있어서,상기 제어 방법은,상기 eVTOL이 터치다운하면, 상기 터치다운한 eVTOL의 로터의 회전에 의하여 발생되는 진동을 측정하는 단계;상기 측정된 진동에 따라 상기 서스펜션에 요구되는 제2 스프링 강성 및 제2 댐퍼 감쇠를 계산하는 단계; 및상기 계산된 제2 스프링 강성 및 제2 댐퍼 감쇠로 상기 서스펜션의 스프링 강성 및 댐퍼 감쇠를 설정하여 상기 서스펜션을 제어하는 단계를 더 포함하는 것을 특징으로 하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 방법. |
| 3 | 제2항에 있어서,상기 제어 방법은,상기 eVTOL의 착륙이 종료되면, 상기 서스펜션에 설정된 스프링 강성 및 댐퍼 감쇠를 미리 설정된 초기값으로 설정하여 상기 서스펜션을 초기화하는 단계를 더 포함하는 것을 특징으로 하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 방법. |
| 4 | 제1항에 있어서,상기 제어 방법은,상기 eVTOL이 이륙을 준비하면, 상기 eVTOL로부터 상기 eVTOL 정보를 수신하는 단계;상기 eVTOL의 이륙준비에 따라 구동된 상기 eVTOL의 로터의 회전에 의하여 발생되는 진동을 측정하는 단계;상기 측정된 진동에 따라 상기 서스펜션에 요구되는 제3 스프링 강성 및 제3 댐퍼 감쇠를 계산하는 단계; 및상기 계산된 제3 스프링 강성 및 제3 댐퍼 감쇠로 상기 서스펜션의 스프링 강성 및 댐퍼 감쇠를 설정하여 상기 서스펜션을 제어하는 단계를 더 포함하는 것을 특징으로 하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 방법. |
| 5 | 제4항에 있어서,상기 제어 방법은,상기 eVTOL의 이륙이 완료되면, 상기 서스펜션에 설정된 스프링 강성 및 댐퍼 감쇠를 미리 설정된 초기값으로 설정하여 상기 서스펜션을 초기화하는 단계를 더 포함하는 것을 특징으로 하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 방법. |
| 6 | 제1항에 있어서,상기 eVTOL 정보는 착륙중량, 로터의 블레이드 개수, 모터의 개수, 구동 주파수 범위를 포함하는 것을 특징으로 하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 방법. |
| 7 | eVTOL(electric vertical take-off and landing)이 안착되는 상부 구조물, 건축물 연결부 및 상기 상부 구조물의 움직임을 상기 건축물 연결부와 분리하는 6개의 서스펜션을 포함하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 장치에 있어서,명령어를 저장하는 메모리; 및상기 명령어를 실행하는 프로세서를 포함하되,상기 명령어는,상기 eVTOL이 착륙을 준비하면, 상기 eVTOL로부터 eVTOL 정보를 수신하는 단계;상기 수신된 eVTOL 정보를 이용하여, 상기 eVTOL이 터치다운하면 상기 이착륙 패드 구조물에 가해지는 충격중량을 예측하는 단계;상기 예측된 충격중량에 따라 상기 서스펜션에 요구되는 제1 스프링 강성 및 제1 댐퍼 감쇠를 계산하는 단계; 및상기 계산된 제1 스프링 강성 및 제1 댐퍼 감쇠로 상기 서스펜션의 스프링 강성 및 댐퍼 감쇠를 설정하여 상기 서스펜션을 제어하는 단계를 포함하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 방법을 수행하는 것을 특징으로 하는 헥사포드 매커니즘을 이용한 이착륙 패드 구조물의 제어 장치. |