| 번호 | 청구항 |
|---|---|
| 2 | 제 1 항에 있어서,상기 3차원 풍력정보를 획득하는 단계는,상기 관성 측정장치로부터 획득된 위치 변화량과 헤딩(heading) 값을 이용하여 상기 바람의 2차원 풍향 추정하는 단계;상기 무인 비행체의 자세 변화 데이터를 통해 추정된 위치 이동값과 상기 GPS 센서에 의한 상기 무인 비행체의 실제 이동값의 차이를 통해 상기 바람의 2차원 풍속을 추정하는 단계; 및 상기 바람의 2차원 풍속 및 상기 온도 기반 풍속센서를 통해 획득된 3차원 바람의 전체 풍속을 이용하여 상기 3차원 바람의 수직성분 풍속을 산출하는 단계; 를 포함하는 것을 특징으로 하는 무인 비행체를 통한 바람장 측정방법. |
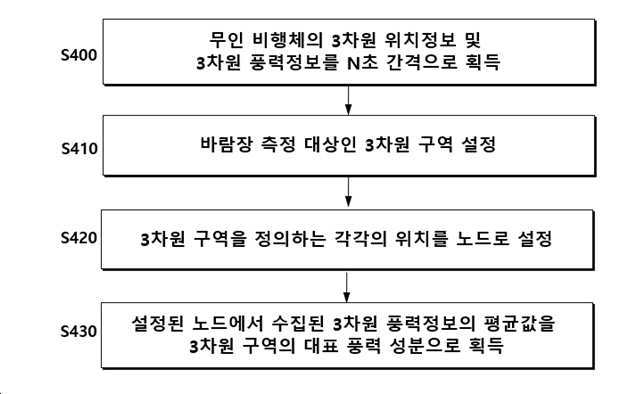
| 1 | 바람의 속도를 측정하는 온도 기반 풍속센서, 상기 바람의 방향을 추정하기 위한 관성 측정장치(IMU)와 GPS 센서를 포함하는 무인 비행체에서 바람장(wind field)을 측정하는 방법에 있어서,화재 발생 영역의 상공을 이동하는 상기 무인 비행체의 3차원 위치정보 및 3차원 풍력정보를 N초 간격으로 획득하는 단계;상기 3차원 위치정보에 기초하여 상기 바람장의 측정 대상인 3차원 구역을 설정하는 단계; 및상기 3차원 구역을 정의하는 각각의 위치를 노드로 설정하는 단계;상기 설정된 노드에서 수집된 상기 3차원 풍력정보의 평균값을 상기 3차원 구역의 대표 풍력 성분으로 획득하는 단계;를 포함하고,상기 3차원 위치정보는 상기 무인 비행체의 좌표정보를 포함하고, 상기 N초 간격으로 수집된 복수의 좌표정보 중 3차원 성분 각각의 최대값과 최소값의 차이를 상기 3차원 구역을 정의하는 노드로 설정하는 것을 특징으로 하는 무인 비행체를 통한 바람장 측정방법. |
| 3 | 제 2 항에 있어서,상기 3차원 풍력정보를 획득하는 단계는,상기 온도 기반 풍속센서, 관성 측정장치 및 GPS 센서의 센서 데이터의 전처리 단계;를 더 포함하고,상기 센서 데이터의 전처리는,무풍 상태에서 상기 무인 비행체의 진동, 정지 비행에서의 진동, 위치 이동값 측정시 오차 보정 처리를 포함하는 것을 특징으로 하는 무인 비행체를 통한 바람장 측정방법. |
| 4 | 제 1 항에 있어서,상기 3차원 구역은 사면체 형상의 구역이며, 상기 3차원 구역을 정의하는 노드는 상기 사면체 형상의 꼭지점에 각각 대응되는 위치인 것을 특징으로 하는 무인 비행체를 통한 바람장 측정방법. |
| 5 | 제 1 항에 있어서,상기 무인 비행체가 복수인 경우, 상기 무인 비행체의 개수가 짝수인 경우 상기 3차원 구역을 정M면체로 배치하고, 상기 무인 비행체의 개수가 홀수인 경우 상기 정M면체의 중앙에 1개가 추가되도록 배치함으로써, 상기 3차원 구역을 설정하는 것을 특징으로 하는 무인 비행체를 통한 바람장 측정방법. |
| 6 | 제 1 항에 있어서,상기 3차원 구역을 정의하는 노드를 포함하는 상기 3차원 구역의 형상을 상기 화재 발생 영역에 매핑하여 구성된 그래픽 인터페이스를 상기 무인 비행체의 출력부를 통해 출력하는 단계;를 더 포함하고,상기 그래픽 인터페이스는 상기 3차원 구역의 대표 풍력 성분을 포함하도록 구성되는 것을 특징으로 하는 무인 비행체를 통한 바람장 측정방법. |
| 7 | 제 6 항에 있어서,상기 그래픽 인터페이스에 포함되는 상기 노드에 대한 입력을 수신하는 경우, 상기 노드의 3차원 좌표 및 시간별로 측정된 풍력정보를 추가적으로 표시하는 단계;를 더 포함하는 것을 특징으로 하는 무인 비행체를 통한 바람장 측정방법. |
| 8 | 화재 발생 영역의 상공을 이동하는 무인 비행체로부터 센서 데이터를 수신하는 통신부; 상기 센서 데이터는, 상기 화재 발생 영역의 상공을 이동하면서 N초 간격으로 획득된 3차원 위치정보 및 3차원 풍력정보를 포함하고,상기 3차원 위치정보에 기초하여 상기 화재 발생 영역의 바람장(wind field)의 측정 대상인 3차원 구역을 설정하고, 상기 3차원 구역을 정의하는 각각의 위치를 노드로 설정하고, 상기 설정된 노드에서 수집된 상기 3차원 풍력정보의 평균값을 상기 3차원 구역의 대표 풍력 성분으로 획득하는 프로세서; 및상기 3차원 구역을 정의하는 노드를 포함하는 상기 3차원 구역의 형상을 상기 화재 발생 영역에 매핑하여 구성된 그래픽 인터페이스를 표시하는 출력부;를 포함하고,상기 3차원 위치정보는 상기 무인 비행체의 좌표정보를 포함하고, 상기 프로세서는, 상기 N초 간격으로 수집된 복수의 좌표정보 중 3차원 성분 각각의 최대값과 최소값의 차이를 상기 3차원 구역을 정의하는 노드로 설정하는 것을 특징으로 하는 무인 비행체의 센서 데이터를 이용한 바람장 측정장치. |
| 9 | 제 8 항에 있어서,상기 프로세서는,상기 그래픽 인터페이스에 포함되는 상기 노드에 대한 입력을 수신하는 경우, 상기 노드의 3차원 좌표 및 시간별로 측정된 풍력정보를 상기 출력부에 표시하는 것을 특징으로 하는 무인 비행체의 센서 데이터를 이용한 바람장 측정장치. |
| 10 | 제 8 항에 있어서,상기 프로세서는,상기 무인 비행체가 단일 드론인 경우, 상기 3차원 구역을 사면체 형상으로 정의하고, 상기 3차원 구역을 정의하는 노드는 상기 사면체 형상의 꼭지점에 각각 대응되는 위치로 설정하는 것을 특징으로 하는 무인 비행체의 센서 데이터를 이용한 바람장 측정장치. |
| 11 | 제 8항에 있어서,상기 프로세서는,상기 무인 비행체가 복수인 경우, 상기 무인 비행체의 개수가 짝수인 경우 상기 3차원 구역을 정M면체로 배치하고, 상기 무인 비행체의 개수가 홀수인 경우 상기 정M면체의 중앙에 1개가 추가되도록 배치함으로써, 상기 3차원 구역을 설정하는 것을 특징으로 하는 무인 비행체의 센서 데이터를 이용한 바람장 측정장치. |
| 12 | 제 11 항에 있어서,상기 프로세서는, 상기 무인 비행체가 복수인 경우, 상기 3차원 구역의 각각의 노드에서 상기 N초 간격으로 상기 3차원 위치정보 및 3차원 풍력정보를 수집하도록 각각의 무인 비행체를 제어하는 것을 특징으로 하는 무인 비행체의 센서 데이터를 이용한 바람장 측정장치. |