| 번호 | 청구항 |
|---|---|
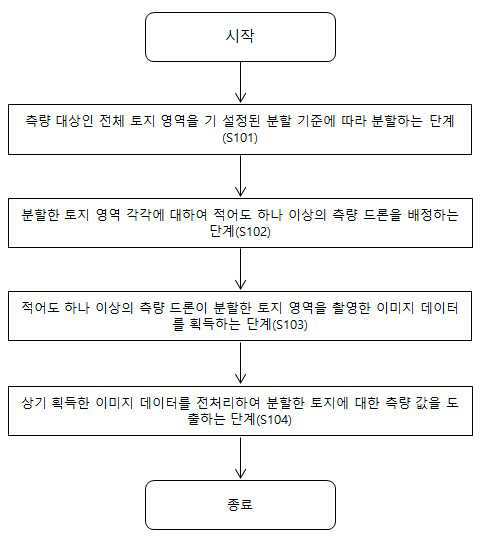
| 1 | 프로세서 및 메모리를 포함하는 장치가 드론을 활용하여 토지를 측량하는 방법에 있어서,(a) 측량 대상인 전체 토지 영역을 기 설정된 분할 기준에 따라 분할하는 단계;(b) 상기 분할한 토지 영역 각각에 대하여 적어도 하나 이상의 측량 드론을 배정하는 단계;(c) 상기 적어도 하나 이상의 측량 드론이 상기 분할한 토지 영역을 촬영한 이미지 데이터를 획득하는 단계; 및(d) 상기 획득한 이미지 데이터를 전처리하여 상기 분할한 토지에 대한 면적 값을 도출하는 단계;를 포함하고,상기 기 설정된 분할 기준은,장치 관리자가 임의로 선택한 경계선에 따라 분할된 기준, 상기 장치 관리자가 임의로 선택한 면적 값에 따라 분할된 기준 또는 상기 전체 토지 영역에 포함된 특정 지형지물에 따라 분할된 기준을 적어도 하나 이상 포함하며, 상기 (b) 단계는,(b-1) 상기 분할한 토지 영역에 배정된 상기 적어도 하나 이상의 측량 드론이 이동 주기마다 다음 순서의 분할한 토지영역으로 이동 가능하도록 순환 방향 및 상기 이동 주기를 설정하는 단계;를 포함하며, 상기 (c) 단계는,(c-1) 상기 적어도 하나 이상의 측량 드론이 상기 이동 주기마다 이동하여 처음 배정받은 분할한 토지영역으로 N(N은 1 이상의 자연수)회 순환한 경우, 상기 적어도 하나 이상의 측량 드론이 분할한 토지영역 각각에 대하여 촬영한 순환 N회분의 이미지 데이터를 획득하는 단계;를 포함하며, 상기 (d) 단계는,상기 순환 N회분의 이미지 데이터를 기반으로 상기 분할한 토지에 대한 복수 개의 면적 값을 도출하였을 시, 앙상블 알고리즘을 활용하여 상기 복수 개의 측량 값 중 최적의 면적 값을 산정하는 단계;를 포함하며,상기 (d) 단계의 이미지 데이터는,측량 드론의 순환 횟수, 측량 드론, 및 측량 대상 토지 영역를 기준으로 분류된 이미지 데이터인 것을 특징으로 하는,드론을 활용한 토지 측량 방법. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 (d) 단계는,(d-1) 상기 획득한 이미지 데이터로부터 촬영 고도, 초점 거리 또는 지형지물의 높이를 획득하는 단계; 및(d-2) 상기 분할한 토지 영역 중 평지 지점은 촬영 고도와 초점 거리 간의 축척을 활용하여 상기 분할한 토지 영역의 평지 지점의 면적 값을 연산하는 단계;를 포함하는,드론을 활용한 토지 측량 방법. |
| 4 | 제3항에 있어서,상기 (d-1) 단계 이후에,(d-2′) 상기 분할한 토지 영역 중 지형지물이 있는 지점은 상기 촬영 고도에서 상기 지형지물 높이를 차감한 값과 초점 거리 간의 축척을 활용하여 상기 분할한 토지 영역 중 지형지물이 있는 지점의 면적 값을 연산하는 단계;를 포함하는,드론을 활용한 토지 측량 방법. |
| 5 | 삭제 |
| 6 | 삭제 |
| 7 | 삭제 |
| 8 | 하나 이상의 프로세서;네트워크 인터페이스;상기 프로세서에 의해 수행되는 컴퓨터 프로그램을 로드(Load)하는 메모리; 및대용량 네트워크 데이터 및 상기 컴퓨터 프로그램을 저장하는 스토리지를 포함하되,상기 컴퓨터 프로그램은 상기 하나 이상의 프로세서에 의해,(A) 측량 대상인 전체 토지 영역을 기 설정된 분할 기준에 따라 분할하는 프로세스;(B) 상기 분할한 토지 영역 각각에 대하여 적어도 하나 이상의 측량 드론을 배정하는 프로세스;(C) 상기 적어도 하나 이상의 측량 드론이 상기 분할한 토지 영역을 촬영한 이미지 데이터를 획득하는 프로세스; 및(D) 상기 획득한 이미지 데이터를 전처리하여 상기 분할한 토지에 대한 면적 값을 도출하는 프로세스를 실행하며,상기 (B) 프로세스는,(B-1) 상기 분할한 토지 영역에 배정된 상기 적어도 하나 이상의 측량 드론이 이동 주기마다 다음 순서의 분할한 토지영역으로 이동 가능하도록 순환 방향 및 상기 이동 주기를 설정하는 프로세스;를 포함하며, 상기 (C) 프로세스는,(C-1) 상기 적어도 하나 이상의 측량 드론이 상기 이동 주기마다 이동하여 처음 배정받은 분할한 토지영역으로 N(N은 1 이상의 자연수)회 순환한 경우, 상기 적어도 하나 이상의 측량 드론이 분할한 토지영역 각각에 대하여 촬영한 순환 N회분의 이미지 데이터를 획득하는 프로세스;를 포함하며, 상기 (D) 프로세스는,상기 순환 N회분의 이미지 데이터를 기반으로 상기 분할한 토지에 대한 복수 개의 면적 값을 도출하였을 시, 앙상블 알고리즘을 활용하여 상기 복수 개의 측량 값 중 최적의 면적 값을 산정하는 프로세스;를 포함하며,상기 (D) 프로세스의 이미지 데이터는,측량 드론의 순환 횟수, 측량 드론, 및 측량 대상 토지 영역를 기준으로 분류된 이미지 데이터인 것을 특징으로 하는,드론을 활용한 토지 측량 장치. |
| 9 | 컴퓨팅 장치와 결합하여,(AA) 측량 대상인 전체 토지 영역을 기 설정된 분할 기준에 따라 분할하는 단계;(BB) 상기 분할한 토지 영역 각각에 대하여 적어도 하나 이상의 측량 드론을 배정하는 단계;(CC) 상기 적어도 하나 이상의 측량 드론이 상기 분할한 토지 영역을 촬영한 이미지 데이터를 획득하는 단계; 및(DD) 상기 획득한 이미지 데이터를 전처리하여 상기 분할한 토지에 대한 상기 분할한 토지에 대한 면적 값을 도출하는 단계;를 실행하되,상기 (BB) 단계는, (BB-1) 상기 분할한 토지 영역에 배정된 상기 적어도 하나 이상의 측량 드론이 이동 주기마다 다음 순서의 분할한 토지영역으로 이동 가능하도록 순환 방향 및 상기 이동 주기를 설정하는 단계;를 포함하며, 상기 (CC) 단계는,(CC-1) 상기 적어도 하나 이상의 측량 드론이 상기 이동 주기마다 이동하여 처음 배정받은 분할한 토지영역으로 N(N은 1 이상의 자연수)회 순환한 경우, 상기 적어도 하나 이상의 측량 드론이 분할한 토지영역 각각에 대하여 촬영한 순환 N회분의 이미지 데이터를 획득하는 단계;를 포함하며, 상기 (DD) 단계는,상기 순환 N회분의 이미지 데이터를 기반으로 상기 분할한 토지에 대한 복수 개의 면적 값을 도출하였을 시, 앙상블 알고리즘을 활용하여 상기 복수 개의 측량 값 중 최적의 면적 값을 산정하는 단계;를 포함하며,상기 (DD) 단계의 이미지 데이터는,측량 드론의 순환 횟수, 측량 드론, 및 측량 대상 토지 영역를 기준으로 분류된 이미지 데이터인 것을 특징으로 하는,매체에 저장된 컴퓨터 프로그램. |