| 번호 | 청구항 |
|---|---|
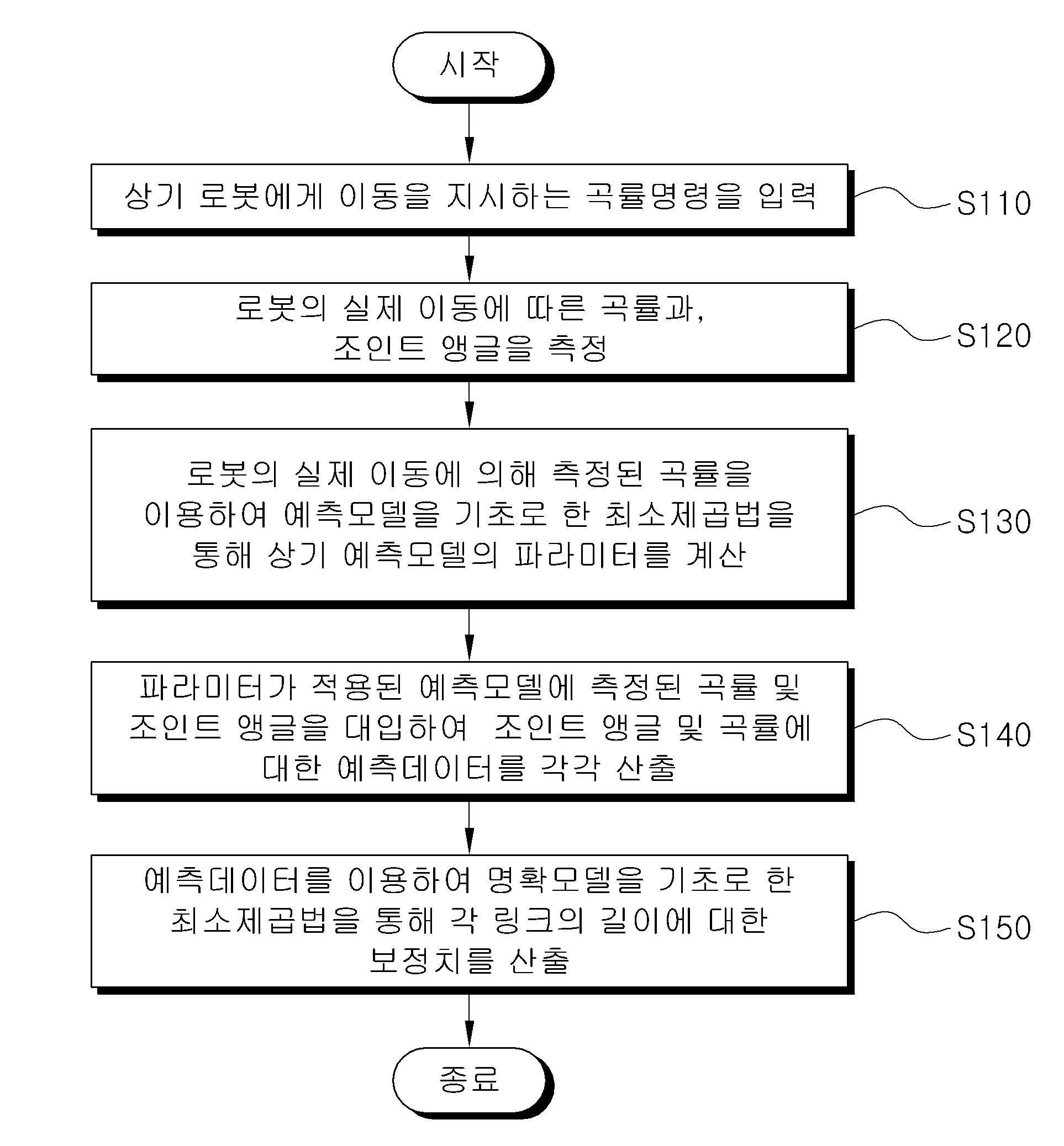
| 1 | 위치 및 각도 측정센서와 컴퓨터를 이용하여 조인트를 통해 연결된 두 개의 링크를 갖는 논홀로노믹 로봇의 파라미터 보정 시스템을 통해 수행되는 파라미터 보정방법에 있어서,상기 로봇에게 임의의 경로를 움직이도록 이동을 지시하는 곡률명령을 입력하여 상기 로봇을 이동시키는 단계(S110);위치 및 각도 측정을 위한 센서를 사용하여 1/경로의 곡률반경(R)로 표현되는 상기 로봇의 실제 이동에 따른 곡률(κm)과, 연결된 링크의 사이 각도인 조인트 앵글을 측정하는 단계(S120);상기 조인트 앵글 및 상기 로봇의 실제 이동에 의해 측정된 곡률(κm)을 이용하여, 상기 조인트 앵글과 곡률과의 관계를 나타낸 방정식인 예측모델을 기초로 한 최소제곱법을 통해 상기 예측모델의 파라미터를 계산하는 단계(S130);상기 파라미터가 적용된 예측모델에 측정된 곡률 및 조인트 앵글을 대입하여 조인트 앵글 및 곡률에 대한 예측데이터를 각각 산출하는 단계(S140);상기 예측데이터를 이용하되, 상기 조인트 앵글과 곡률과 각 링크의 길이에 대한 관계를 나타낸 방정식인 정확모델을 기초로 한 최소제곱법을 통해 각 링크의 길이에 대한 보정치를 산출하는 단계(S150); 로 이루어지되,상기 예측모델은PM1: 또는 PM2: ; (: 측정된 조인트 앵글, : 측정된 곡률, 및 : 예측모델의 파라미터)로 표현되는 두 가지 모델 중에서 선택되고,상기 정확모델은,EM1: ,EM2: ,EM3: ; (κ: 곡률, Ψ: 조인트 앵글, L1: 첫 번째 링크의 길이 , L2: 두 번째 링크의 길이)로 표현되는 세 가지 모델 중에서 선택되는 것을 특징으로 하는 두 개의 링크를 갖는 논홀로노믹 로봇의 파라미터 보정방법. |
| 2 | 제1항에 있어서,상기 최소제곱법은,OLS1: 피팅에러를 출력에러로 적용하는 최소제곱법과,OLS2: 피팅에러를 입력에러로 적용하는 최소제곱법과,TLS: 피팅에러를 로 적용하는 최소제곱법 중에서 선택되는 것을 특징으로 하는 두 개의 링크를 갖는 논홀로노믹 로봇의 파라미터 보정방법. |
| 3 | 삭제 |
| 4 | 제2항에 있어서,상기 예측모델을 기초로 한 최소제곱법을 통해 상기 예측모델의 파라미터를 계산하는 단계는 OLS2와 PM1의 조합 또는 TLS와 PM1의 조합으로 이루어진 예측모델을 기초로 한 최소제곱법 중에서 선택되는 것을 특징으로 하는 두 개의 링크를 갖는 논홀로노믹 로봇의 파라미터 보정방법. |
| 5 | 삭제 |
| 6 | 제2항에 있어서,상기 정확모델을 기초로 한 최소제곱법을 통해 각 링크의 길이에 대한 보정치를 산출하는 단계는 OLS1과 EM1의 조합과, OLS1과 EM2의 조합과, OLS1과 EM3의 조합과, TLS와 EM1과 EM2와 EM3의 조합 중 선택되는 조합으로 이루어진 정확모델을 기초로 한 최소제곱법 중에서 선택되는 것을 특징으로 하는 두 개의 링크를 갖는 논홀로노믹 로봇의 파라미터 보정방법. |