| 번호 | 청구항 |
|---|---|
| 1 | 메모리; 및 상기 메모리와 전기적으로 연결된 프로세서를 포함하는 장치에서 수행되는 방법에 있어서,상기 프로세서를 통해, 딥러닝 모델을 이용하여 복수의 센서들로부터 수집한 데이터 내에 존재하는 적어도 하나의 객체를 인지하고 객체별 측정값을 생성하는 단계;상기 프로세서를 통해, 객체 종속적인 로컬 좌표계를 기준으로 표현된 상기 객체별 측정값을 객체 독립적인 글로벌 좌표계의 값으로 변환하는 단계;상기 프로세서를 통해, 상기 객체별 측정값과 이전 단계의 트랙렛(Tracklet) 집합의 트랙렛들에 기초한 객체별 예측값을 비교하여 동일 객체를 매칭하는 단계; 및상기 프로세서를 통해, 상기 동일 객체로 매칭된 경우 해당 객체의 상태를 식별하고 정지 상태로 식별된 정지 객체의 측정값을 기초로 이중 예측모델을 통해 거동 방향을 추정하는 단계;를 포함하는 이중 예측모델을 사용한 정지상태 차량의 정확한 초기 상태 추정 방법. |
| 2 | 제1항에 있어서, 상기 객체별 측정값을 생성하는 단계는각 객체의 상태를 나타내는 상태 변수 집합을 상기 객체별 측정값으로서 생성하는 단계를 포함하는 것을 특징으로 하는 이중 예측모델을 사용한 정지상태 차량의 정확한 초기 상태 추정 방법. |
| 3 | 제1항에 있어서, 상기 동일 객체를 매칭하는 단계는각 트랙렛의 상태값을 기초로 동역학 모델을 이용하여 예측된 현재 단계의 상태값을 상기 객체별 예측값으로서 생성하는 단계를 포함하는 것을 특징으로 하는 이중 예측모델을 사용한 정지상태 차량의 정확한 초기 상태 추정 방법. |
| 4 | 제1항에 있어서, 상기 동일 객체를 매칭하는 단계는특정 트랙렛의 예측된 위치를 기준으로 게이트(Gate)로 정의되는 가상의 타원을 생성하고 해당 게이트 영역 내부에 포함된 객체별 측정값 중에서 상기 예측된 위치와 가장 가까운 측정값을 상기 특정 트랙렛과 매칭하는 단계를 포함하는 것을 특징으로 하는 이중 예측모델을 사용한 정지상태 차량의 정확한 초기 상태 추정 방법. |
| 5 | 제4항에 있어서, 상기 동일 객체를 매칭하는 단계는상기 트랙렛(Tracklet) 집합의 각 트랙렛과 매칭되지 않은 측정값이 존재하는 경우 해당 측정값의 객체를 새로운 객체로 인지하여 신규 트랙렛을 생성한 후 상기 트랙렛 집합에 추가하는 단계를 포함하는 것을 특징으로 하는 이중 예측모델을 사용한 정지상태 차량의 정확한 초기 상태 추정 방법. |
| 6 | 제1항에 있어서, 상기 거동 방향을 추정하는 단계는상기 정지 객체의 측정값을 직진방향 모델 및 후진방향 모델에 적용하여 상기 정지 객체의 다음 위치를 각각 예측하는 단계를 포함하는 것을 특징으로 하는 이중 예측모델을 사용한 정지상태 차량의 정확한 초기 상태 추정 방법. |
| 7 | 제6항에 있어서, 상기 거동 방향을 추정하는 단계는상기 정지 객체의 측정값과 상기 다음 위치로 각각 예측된 제1 및 제2 예측값들 간의 IoU(Intersection over Union)를 산출하여 상기 거동 방향을 추정하는 단계를 포함하는 것을 특징으로 하는 이중 예측모델을 사용한 정지상태 차량의 정확한 초기 상태 추정 방법. |
| 8 | 제1항에 있어서, 상기 거동 방향을 추정하는 단계는상기 거동 방향의 추정 결과에 따라 확장칼만필터(EKF, Extended Kalman Filter)를 업데이트하는 단계를 포함하는 것을 특징으로 하는 이중 예측모델을 사용한 정지상태 차량의 정확한 초기 상태 추정 방법. |
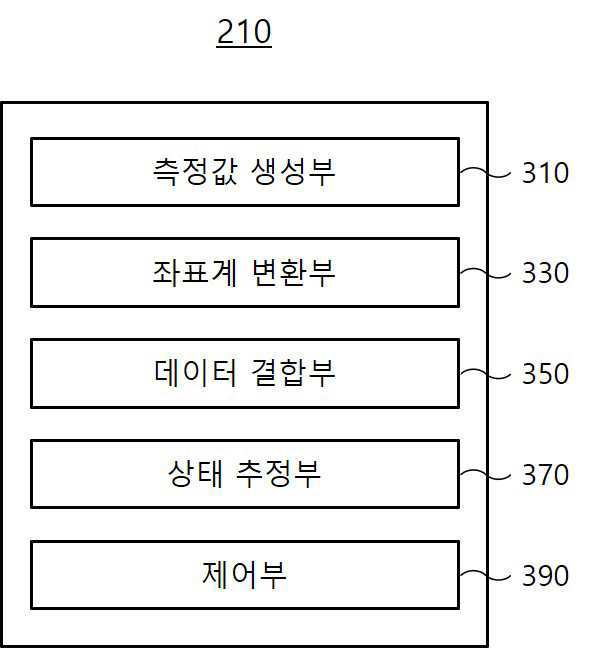
| 9 | 딥러닝 모델을 이용하여 복수의 센서들로부터 수집한 데이터 내에 존재하는 적어도 하나의 객체를 인지하고 객체별 측정값을 생성하는 측정값 생성부;객체 종속적인 로컬 좌표계를 기준으로 표현된 상기 객체별 측정값을 객체 독립적인 글로벌 좌표계의 값으로 변환하는 좌표계 변환부;상기 객체별 측정값과 이전 단계의 트랙렛(Tracklet) 집합의 트랙렛들에 기초한 객체별 예측값을 비교하여 동일 객체를 매칭하는 데이터 결합부; 및상기 동일 객체로 매칭된 경우 해당 객체의 상태를 식별하고 정지 상태로 식별된 정지 객체의 측정값을 기초로 이중 예측모델을 통해 거동 방향을 추정하는 상태 추정부;를 포함하는 이중 예측모델을 사용한 정지상태 차량의 정확한 초기 상태 추정 장치. |