| 번호 | 청구항 |
|---|---|
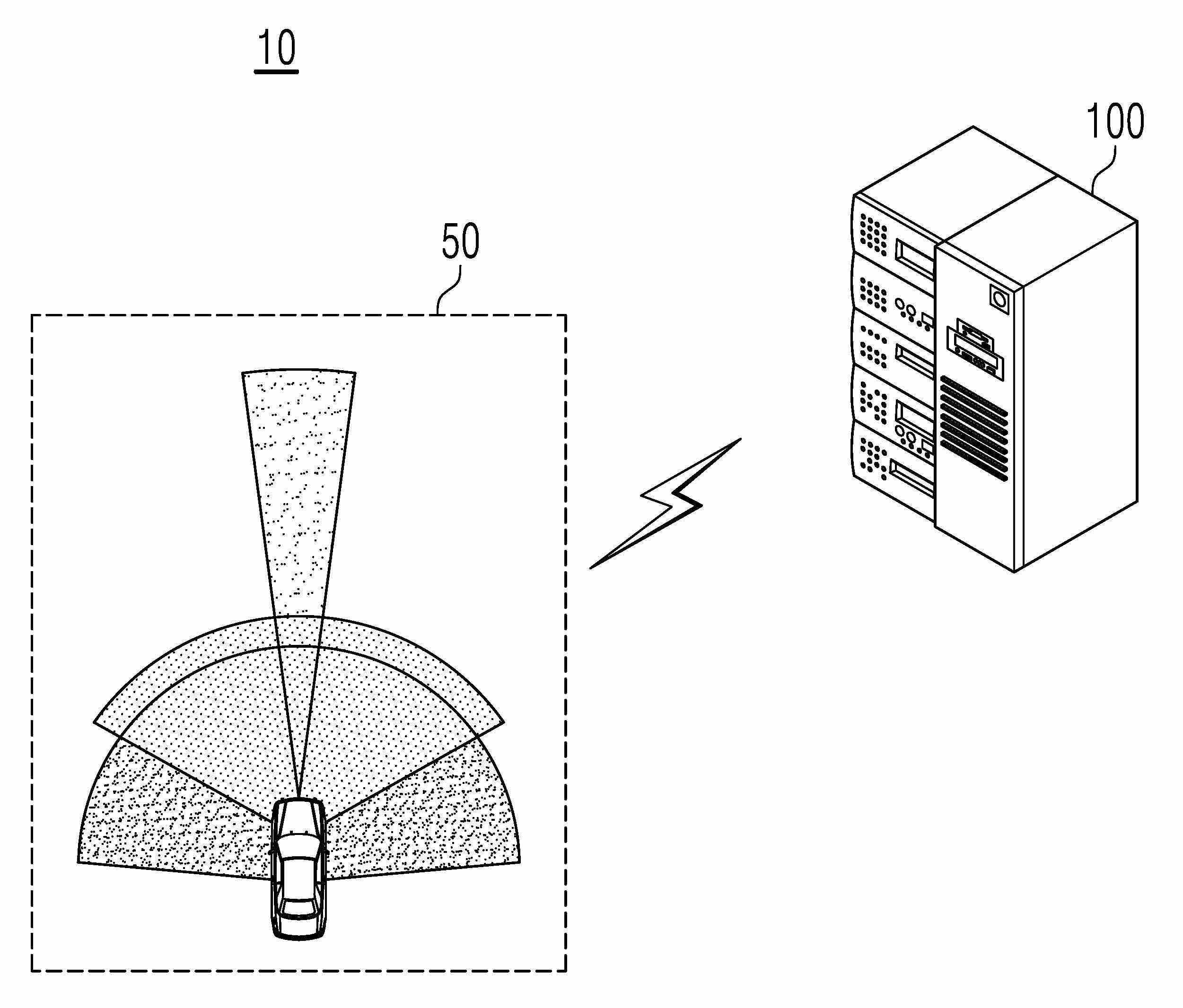
| 1 | 자율주행 시스템 검증 방법으로서,주행 환경을 생성하는 단계로서, 차량이 주행하는 주행 방향과 나란한 방향의 주행 도로 및 상기 차량의 주변 객체의 거동에 대한 정보를 포함하는 주행 환경을 생성하는 단계; 상기 차량의 시야 범위, 상기 주행 방향 및 상기 주행 환경에 기반하여 상기 차량이 인지하는 인지 범위를 생성하되, 상기 시야 범위는 기 설정되는 센서 정보에 기초하여 결정되는, 인지 범위를 생성하는 단계; 상기 주행 환경 및 상기 인지 범위를 검증 대상이 되는 자율 주행 시스템에 제공하는 단계 및상기 자율 주행 시스템의 주행 결과를 분석하는 단계를 포함하는,시뮬레이션 기반의 자율주행 시스템 검증 방법. |
| 2 | 제1항에 있어서, 상기 주행환경을 생성하는 단계는, 상기 차량의 주행 상황에 대한 정보를 생성하는 단계; 상기 차량이 주행하는 도로에 대한 정보를 생성하는 단계; 상기 차량 주행 시 상기 차량의 주행을 제한하는 제한 조건에 대한 정보를 생성하는 단계; 및 상기 차량 주변의 상기 객체의 거동에 대한 정보를 생성하는 단계를 포함하는,시뮬레이션 기반의 자율주행 시스템 검증 방법. |
| 3 | 제2항에 있어서, 상기 주행하는 도로에 대한 정보를 생성하는 단계는, 상기 차량이 주행하는 도로의 유형 및 도로 노면 중 어느 하나에 대한 도로 상황을 생성하는 단계를 포함하는, 시뮬레이션 기반의 자율주행 시스템 검증 방법. |
| 4 | 제2항에 있어서, 상기 제한 조건에 대한 정보를 생성하는 단계는, 상기 차량이 주행하는 도로의 속도 제한 및 교통 상황에 대한 정보를 생성하는 단계를 포함하는, 시뮬레이션 기반의 자율주행 시스템 검증 방법. |
| 5 | 제2항에 있어서, 상기 객체에 대한 정보를 생성하는 단계는, 상기 차량 주변의 객체로서, 정적 객체 및 동적 객체 정보를 생성하는 단계를 포함하는,시뮬레이션 기반의 자율주행 시스템 검증 방법. |
| 6 | 제1항에 있어서, 상기 시야 범위를 설정하는 단계는, 상기 차량에 기 설정된 시야각에 더 기반하여 결정되는, 시뮬레이션 기반의 자율주행 시스템 검증 방법. |
| 7 | 제1항에 있어서,상기 인지 범위를 생성하는 단계는,상기 차량 전방이 폐색되는 폐색 범위를 생성하는 단계를 포함하고,상기 인지 범위는 상기 시야 범위에서 상기 폐색 범위를 제외하여 생성되는,시뮬레이션 기반의 자율주행 시스템 검증 방법. |
| 8 | 제7항에 있어서,상기 폐색 범위를 생성하는 단계는,상기 시야 범위 내 존재하는 상기 주변 객체가 복수인 경우,상기 시야 범위 내 존재하는 상기 주변 객체의 크기와 위치를 고려하여 상기 주변 객체 각각에 대응하는 복수의 바운딩 박스(Bounding Box)를 설정하는 단계;상기 시야 범위에서 복수의 바운딩 박스 각각에 대해 폐색 현상을 구현한 복수의 개별 폐색 범위를 결정하는 단계를 포함하고,상기 인지 범위를 생성하는 단계는,상기 시야 범위에서 상기 복수의 개별 폐색 범위를 각각 제외하여, 상기 복수의 주변 객체에 대응하는 복수의 개별 인지 범위를 생성하는 단계; 및상기 복수의 개별 인지 범위가 중첩되는 범위를 상기 인지 범위로 생성하는 단계를 포함하는,시뮬레이션 기반의 자율주행 시스템 검증 방법. |
| 9 | 제1항에 있어서,상기 자율 주행 시스템의 주행 결과를 분석하는 단계는,상기 차량이 상기 주변 객체와 충돌이 발생하는 경우,상기 충돌의 유형을 분석하는 단계;상기 충돌의 원인을 분석하는 단계; 및상기 충돌에 대한 안전 요구 사항을 분석하는 단계를 포함하는,시뮬레이션 기반의 자율주행 시스템 검증 방법. |
| 10 | 자율주행 시스템 검증 장치로서,프로세서;상기 프로세서와 동작 가능하게 연결되는 메모리;차량이 주행하는 주행 방향과 나란한 방향의 주행 도로 및 상기 차량의 주변 객체의 거동에 대한 정보를 포함하는 주행 환경을 생성하는 시나리오 생성부;기 설정되는 센서 정보에 기초하여 상기 차량의 시야 범위를 결정하고, 상기상기 시야 범위, 상기 주행 방향 및 상기 주행 환경에 기반하여 상기 차량이 인지하는 인지 범위를 생성하는 센서 모델부;상기 주행 환경 및 상기 인지 범위를 검증 대상이 되는 자율 주행 시스템에 제공하고, 상기 주행 환경 및 상기 인지 범위에 대응하는 상기 자율 주행 시스템의 주행 결과를 수신하는 통신부; 및상기 수신된 주행 결과를 분석하는 자율주행 분석부를 포함하는,시뮬레이션 기반의 자율주행 시스템 검증 장치. |
| 11 | 제10항에 있어서, 상기 시나리오 생성부는,상기 차량의 주행 상황에 대한 정보를 생성하고, 상기 차량이 주행하는 도로에 대한 정보를 생성하고, 상기 차량 주행 시 상기 차량의 주행을 제한하는 제한 조건에 대한 정보를 생성하고, 상기 차량 주변의 상기 객체의 거동에 대한 정보를 생성하도록 더 구성되는,시뮬레이션 기반의 자율주행 시스템 검증 장치. |
| 12 | 제11항에 있어서, 상기 시나리오 생성부는,상기 주행하는 도로에 대한 정보를 생성함에 있어서, 상기 차량이 주행하는 도로의 유형 및 도로 노면 중 어느 하나에 대한 도로 상황을 생성하도록 구성되는, 시뮬레이션 기반의 자율주행 시스템 검증 장치. |
| 13 | 제11항에 있어서, 상기 시나리오 생성부는,상기 제한 조건에 대한 정보를 생성함에 있어서, 상기 차량이 주행하는 도로의 속도 제한 및 교통 상황에 대한 정보를 생성하도록 구성되는,시뮬레이션 기반의 자율주행 시스템 검증 장치. |
| 14 | 제11항에 있어서, 상기 시나리오 생성부는,생기 객체에 대한 정보를 생성함에 있어서,상기 차량 주변의 객체로서, 정적 객체 및 동적 객체 정보를 생성하도록 구성되는,시뮬레이션 기반의 자율주행 시스템 검증 장치. |
| 15 | 제10항에 있어서, 상기 센서 모델부는,상기 차량에 기 설정된 시야각에 더 기반하여 상기 시야범위를 결정하도록 구성되는,시뮬레이션 기반의 자율주행 시스템 검증 장치. |
| 16 | 제10항에 있어서,상기 센서 모델부는 상기 차량 전방이 폐색되는 폐색 범위를 생성하고,상기 시야 범위에서 상기 폐색 범위를 제외한 범위로 상기 인지 범위를 결정하도록 구성되는,시뮬레이션 기반의 자율주행 시스템 검증 장치. |
| 17 | 제16항에 있어서,상기 센서 모델부는,상기 시야 범위 내 존재하는 상기 주변 객체가 복수인 경우,상기 시야 범위 내 존재하는 상기 주변 객체의 크기와 위치를 고려하여 상기 주변 객체 각각에 대응하는 복수의 바운딩 박스(Bounding Box)를 설정하고,상기 시야 범위에서 복수의 바운딩 박스 각각에 대해 폐색 현상을 구현한 복수의 개별 폐색 범위를 결정하고,상기 시야 범위에서 상기 복수의 개별 폐색 범위를 각각 제외하여, 상기 복수의 주변 객체에 대응하는 복수의 개별 인지 범위를 생성하고상기 복수의 개별 인지 범위가 중첩되는 범위를 상기 인지 범위로 생성하도록 구성되는,시뮬레이션 기반의 자율주행 시스템 검증 장치. |
| 18 | 제10항에 있어서,상기 자율주행 분석부는,상기 차량이 상기 주변 객체와 충돌이 발생하는 경우,상기 충돌의 유형을 분석하고상기 충돌의 원인을 분석하고,상기 충돌에 대한 안전 요구 사항을 분석하도록 구성되는,,시뮬레이션 기반의 자율주행 시스템 검증 장치. |