| 번호 | 청구항 |
|---|---|
| 1 | 각 단계의 적어도 일부가 STPA에 기반하여 컴퓨터에 의해 수행되고, 자율주행 차량의 안전성을 시뮬레이션하는 방법으로서,상기 자율주행 차량의 가상 차량 모델, 위험 원인 시나리오 및 시뮬레이션 환경 정보를 로딩하는 단계;상기 시뮬레이션 환경 정보에 기반하여 상기 가상 차량 모델을 가상으로 주행시키는 단계; 상기 가상 차량 모델의 가상 주행 중, 상기 가상 차량 모델을 구성하는 시스템 컴포넌트들 중 적어도 하나의 대상 시스템 컴포넌트를 상기 위험 원인 시나리오의 UCA(Unsafe Control Action)에 기반하여 제어하는 단계;상기 UCA에 기반한 상기 가상 차량 모델의 가상 주행 중에 상기 가상 차량 모델의 사고가 발생하거나 상기 UCA와 관련된 안전 제약 사항의 위반이 발생하는지를 모니터링하는 단계; 및상기 가상 차량 모델의 사고가 발생하거나 상기 UCA와 관련된 안전 제약 사항의 위반이 발생한 경우 미리 설정된 기준에 의하여 사고 심각도를 결정하는 단계를 포함하는 자율주행 차량의 안전성 시뮬레이션 방법. |
| 2 | 제1항에 있어서,상기 사고 심각도가 미리 설정된 기준 값 이상인 경우, 상기 UCA에 기반한 제어 이후의 상기 가상 차량 모델의 상기 시스템 컴포넌트들의 제어 명령 및 제어 값들을 저장하는 단계를 더 포함하는 자율주행 차량의 안전성 시뮬레이션 방법. |
| 3 | 제2항에 있어서,상기 시스템 컴포넌트들의 상기 제어 명령 중 미리 설정된 제어 명령과 관련이 없는 상기 제어 명령을 저장하는 단계를 더 포함하는 자율주행 차량의 안전성 시뮬레이션 방법. |
| 4 | 제1항에 있어서,상기 사고 심각도가 미리 설정된 기준 값 이상인 경우, 상기 위험 원인 시나리오를 SOTIF에 기반한 위험성 분석 시나리오로 결정하는 단계를 더 포함하는 자율주행 차량의 안전성 시뮬레이션 방법. |
| 5 | 제4항에 있어서,상기 시뮬레이션 환경 정보를 로딩하는 단계는,상기 위험 원인 시나리오의 상기 UCA의 상황 정보(Context)에 대응하는 상기 시뮬레이션 환경 정보를 로딩하는 단계를 포함하는 자율주행 차량의 안전성 시뮬레이션 방법. |
| 6 | 제1항에 있어서,상기 위험 원인 시나리오에 포함된 원인 요소(Causal Factor)와 관련된 센서 모델을 로딩하는 단계를 더 포함하는 자율주행 차량의 안전성 시뮬레이션 방법. |
| 7 | 제6항에 있어서,상기 센서 모델은 레이더 센서의 센서 모델이고,상기 위험 원인 시나리오는 상기 UCA의 상황 정보(UCA Context), 원인 요소(Causal Factor) 및 UCA 유형(UCA Type)으로 구성되고,레이더 센서의 한계 상황에 기반한 위험 시나리오의 원인 요소는 자차량, 센서, 공간, 주변 환경 및 주변 객체로 결정되며, 상기 원인 요소는 레이더 센서의 각도 변화, 굴절, 전파 지연, 투과율 저하, 감쇠비 저하, 역반사 및 무신호로 결정되는 자율주행 차량의 안전성 시뮬레이션 방법. |
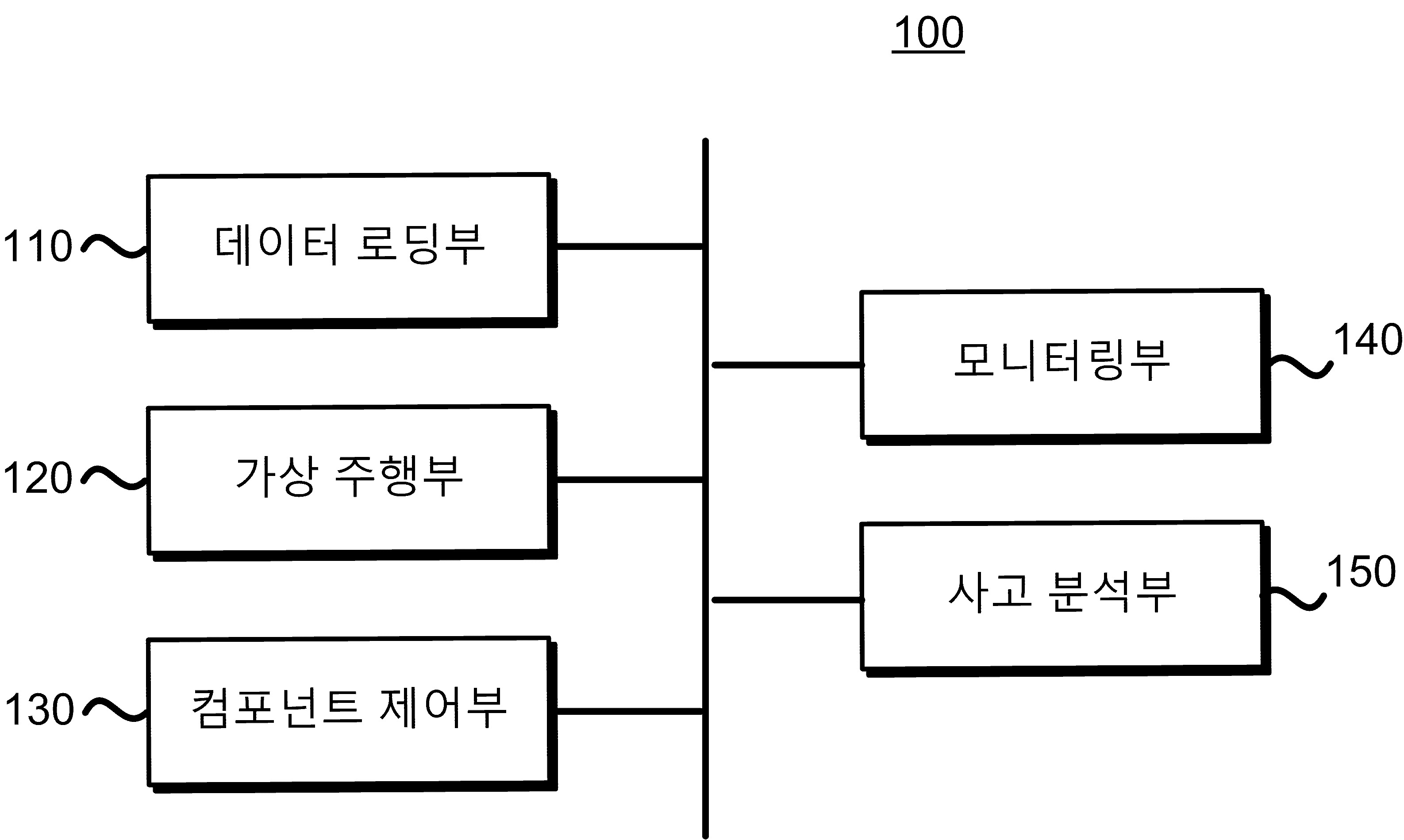
| 8 | 자율주행 차량의 가상 차량 모델, 위험 원인 시나리오 및 시뮬레이션 환경 정보를 로딩하는 데이터 로딩부;상기 시뮬레이션 환경 정보에 기반하여 상기 가상 차량 모델을 가상으로 주행시키는 가상 주행부;상기 가상 차량 모델의 가상 주행 중, 상기 가상 차량 모델을 구성하는 시스템 컴포넌트들 중 적어도 하나의 대상 시스템 컴포넌트를 상기 위험 원인 시나리오의 UCA(Unsafe Control Action)에 기반하여 제어하는 컴포넌트 제어부;상기 UCA에 기반한 상기 가상 차량 모델의 가상 주행 중에 상기 가상 차량 모델의 사고가 발생하거나 상기 UCA와 관련된 안전 제약 사항의 위반이 발생하는지를 모니터링하는 모니터링부; 및상기 가상 차량 모델의 사고가 발생하거나 상기 UCA와 관련된 안전 제약 사항의 위반이 발생한 경우 미리 설정된 기준에 의하여 사고 심각도를 결정하는 사고 분석부를 포함하는 자율주행 차량의 안전성 시뮬레이션 시스템. |
| 9 | 제8항에 있어서,상기 사고 심각도가 미리 설정된 기준 값 이상인 경우, 상기 UCA에 기반한 제어 이후의 상기 가상 차량 모델의 상기 시스템 컴포넌트들의 제어 명령 및 제어 값들을 저장하는 메모리를 더 포함하는 자율주행 차량의 안전성 시뮬레이션 시스템. |
| 10 | 제9항에 있어서,상기 모니터링부는 상기 시스템 컴포넌트들의 상기 제어 명령 중 미리 설정된 제어 명령과 관련이 없는 상기 제어 명령을 저장하는 자율주행 차량의 안전성 시뮬레이션 시스템. |
| 11 | 제8항에 있어서,상기 데이터 로딩부는 상기 위험 원인 시나리오에 포함된 원인 요소(Causal Factor)와 관련된 센서 모델을 로딩하는 자율주행 차량의 안전성 시뮬레이션 시스템. |
| 12 | 제13항에 있어서,상기 센서 모델은 레이더 센서의 센서 모델이고,상기 위험 원인 시나리오는 상기 UCA의 상황 정보(UCA Context), 원인 요소(Causal Factor) 및 UCA 유형(UCA Type)으로 구성되고,레이더 센서의 한계 상황에 기반한 위험 시나리오의 상기 원인 요소는 자차량, 센서, 공간, 주변 환경 및 주변 객체로 결정되며, 상기 원인 요소는 레이더 센서의 각도 변화, 굴절, 전파 지연, 투과율 저하, 감쇠비 저하, 역반사 및 무신호로 결정되는 자율주행 차량의 안전성 시뮬레이션 시스템. |
| 13 | 적어도 하나의 명령어를 저장하는 적어도 하나의 메모리; 및상기 메모리에 연결되는 적어도 하나의 프로세서를 포함하고,상기 적어도 하나의 프로세서는 상기 적어도 하나의 명령어를 실행하여:자율주행 차량의 가상 차량 모델, 위험 원인 시나리오 및 시뮬레이션 환경 정보를 로딩하고,상기 시뮬레이션 환경 정보에 기반하여 상기 가상 차량 모델을 가상으로 주행시키고,상기 가상 차량 모델의 가상 주행 중, 상기 가상 차량 모델을 구성하는 시스템 컴포넌트들 중 적어도 하나의 대상 시스템 컴포넌트를 상기 위험 원인 시나리오의 UCA(Unsafe Control Action)에 기반하여 제어하고,상기 UCA에 기반한 상기 가상 차량 모델의 가상 주행 중에 상기 가상 차량 모델의 사고가 발생하거나 상기 UCA와 관련된 안전 제약 사항의 위반이 발생하는지를 모니터링하고,상기 가상 차량 모델의 사고가 발생하거나 상기 UCA와 관련된 안전 제약 사항의 위반이 발생한 경우 미리 설정된 기준에 의하여 사고 심각도를 결정하는 자율주행 차량의 안전성 시뮬레이션 장치. |
| 14 | 제13항에 있어서,상기 사고 심각도가 미리 설정된 기준 값 이상인 경우, 상기 UCA에 기반한 제어 이후의 상기 가상 차량 모델의 상기 시스템 컴포넌트들의 제어 명령 및 제어 값들을 저장하는 메모리를 더 포함하고,상기 시스템 컴포넌트들의 상기 제어 명령 중 미리 설정된 제어 명령과 관련이 없는 상기 제어 명령을 저장하는 메모리를 더 포함하는 자율주행 차량의 안전성 시뮬레이션 장치. |
| 15 | 제13항에 있어서,상기 데이터 로딩부는 상기 위험 원인 시나리오에 포함된 원인 요소(Causal Factor)와 관련된 센서 모델을 로딩하고,상기 센서 모델은 레이더 센서의 센서 모델이고,상기 위험 원인 시나리오는 상기 UCA의 상황 정보(UCA Context), 원인 요소(Causal Factor) 및 UCA 유형(UCA Type)으로 구성되고,레이더 센서의 한계 상황에 기반한 위험 시나리오의 상기 원인 요소는 자차량, 센서, 공간, 주변 환경 및 주변 객체로 결정되며, 상기 원인 요소는 레이더 센서의 각도 변화, 굴절, 전파 지연, 투과율 저하, 감쇠비 저하, 역반사 및 무신호로 결정되는 자율주행 차량의 안전성 시뮬레이션 장치. |