| 번호 | 청구항 |
|---|---|
| 3 | 제 1 항에 있어서, 상기 동기화하는 단계는, 상기 자율 주행 테스트 차량의 실제 위치 정보를 수신하는 단계; 및상기 변환된 가상 위치 정보를 상기 자율 주행 테스트 차량으로 전송하는 단계;를 포함하는 시뮬레이션 방법. |
| 4 | 삭제 |
| 5 | 제 3 항에 있어서, 상기 동기화하는 단계는, 외삽법을 이용하여 상기 자율 주행 테스트 차량의 연속적인 위치 정보를 생성하는 단계;를 포함하는 시뮬레이션 방법. |
| 1 | 시뮬레이션 장치의 시뮬레이션 방법에 있어서, 가상 도로를 생성하는 단계;실제 주행 시험장(Proving Ground, PG)의 자율 주행 테스트 차량의 위치와 상기 가상 도로상의 시뮬레이션 차량의 위치를 동기화하는 단계; 이전에 수행된 상기 자율 주행 테스트 차량의 테스트 운행 동안 상기 자율 주행 테스트 차량의 주변에서 운행된 타겟 차량의 실제 거동 데이터에 기초하여 상기 가상 도로상에 가상 트래픽의 거동을 생성하는 단계; 상기 동기화된 자율 주행 테스트 차량의 상태 정보 및 상기 가상 트래픽의 거동에 기초하여, 상기 가상 트래픽에 대한 가상 인지 센서 데이터를 생성하는 단계; 및 상기 동기화된 자율 주행 테스트 차량으로 상기 가상 인지 센서 데이터를 전송하는 단계;를 포함하고,상기 동기화하는 단계는, 아래의 수학식을 통해 상기 자율 주행 테스트 차량의 실제 위치 정보를 상기 가상 도로상의 가상 위치 정보로 변환하는 단계;를 포함하고, 여기서, 는 상기 가상 도로의 시작 지점을 나타내고, 는 시뮬레이션 시작 시 상기 자율 주행 테스트 차량이 위치한 지점을 나타내고, 는 상기 가상 위치 정보를 나타내고, 는 상기 자율 주행 테스트 차량의 글로벌 위치를 나타내고, 는 상기 자율 주행 테스트 차량의 방향값을 나타내는, 시뮬레이션 방법. |
| 2 | 제 1 항에 있어서, 상기 가상 도로를 생성하는 단계는, 실제 자율 주행 테스트베드에 대한 HD(High-Definition) 맵 데이터를 UTM(Universal Transverse Mercator) 좌표계로 변환하는 단계;를 포함하는 시뮬레이션 방법. |
| 6 | 제 1 항에 있어서, 상기 타겟 차량의 실제 거동 데이터는, 상기 타겟 차량의 위치, 속도 및 방향에 관한 데이터를 포함하는 시뮬레이션 방법. |
| 7 | 제 1 항에 있어서, 상기 가상 트래픽의 거동을 생성하는 단계는, PCHIP(Piecewise Cubic Hermite-Interpolating-Polynomial) 방법을 이용하여 상기 타겟 차량의 실제 거동 데이터를 보간하는 단계;를 포함하는 시뮬레이션 방법. |
| 8 | 제 1 항에 있어서, 상기 가상 인지 센서 데이터는, 상기 동기화된 시뮬레이션 차량과 상기 가상 트래픽 간의 상대 거리 정보 및 상대 속도 정보를 포함하는 시뮬레이션 방법. |
| 9 | 제 8 항에 있어서, 상기 동기화된 자율 주행 테스트 차량의 상태 정보는, 상기 자율 주행 테스트 차량에 탑재된 RTK-GPS(Real Time Kinematic Global Positioning System)에 의해 측정된 위치 정보, 속도 정보 및 방향 정보 중 적어도 하나를 포함하는 시뮬레이션 방법. |
| 10 | 제 8 항에 있어서, 상기 가상 인지 센서 데이터를 생성하는 단계는, 상기 자율 주행 테스트 차량의 RTK-GPS 탑재 위치와 인지 센서 탑재 위치 간의 거리에 관한 정보, 상기 타겟 차량의 RTK-GPS 탑재 위치에 관한 정보, 및 상기 자율 주행 테스트 차량의 인지 센서가 상기 타겟 차량을 감지하는 지점에 관한 정보를 반영하여 상기 가상 인지 센서 데이터를 생성하는 시뮬레이션 방법. |
| 11 | 제 10 항에 있어서, 상기 상대 거리 정보는, 아래의 수학식을 통해 산출되는 시뮬레이션 방법. 여기서, 는 상기 자율 주행 테스트 차량에 탑재된 인지 센서를 나타내고, 는 상기 자율 주행 테스트 차량에 탑재된 인지 센서에 의해 감지되는 지점을 나타내고, 는 상기 동기화된 시뮬레이션 차량을 나타내고, 는 상기 가상 트래픽을 나타내고,는 글로벌 좌표를 나타내고, 는 상기 상대 거리를 나타내고, 는 상기 자율 주행 테스트 차량의 RTK-GPS 탑재 위치와 인지 센서 탑재 위치 간의 거리를 나타내고, 은 상기 타겟 차량의 RTK-GPS 탑재 위치와 상기 자율 주행 테스트 차량에 탑재된 인지 센서에 의해 감지되는 지점 사이의 거리를 나타낸다. |
| 12 | 제 11 항에 있어서, 상기 상대 속도 정보는, 아래의 수학식을 통해 산출되는 시뮬레이션 방법. 여기서, 는 상기 동기화된 시뮬레이션 차량을 나타내고, 는 상기 가상 트래픽을 나타내고, 는 상기 상대 속도를 나타내고, 는 차량의 절대 속도를 나타낸다. |
| 13 | 제 12 항에 있어서, 상기 가상 인지 센서 데이터를 생성하는 단계는, 상기 RTK-GPS에 기초하여 산출된 상대 거리 정보 및 상대 속도 정보를 상기 자율 주행 테스트 차량에 탑재된 실제 인지 센서의 데이터와 비교하여 에러 데이터를 산출하는 단계; 및상기 산출된 에러 데이터에 기초하여 생성된 정규 분포 노이즈를 상기 RTK-GPS에 기초하여 산출된 상대 거리 정보 및 상대 속도 정보에 삽입하는 단계;를 포함하는 시뮬레이션 방법. |
| 14 | 제 13 항에 있어서, 상기 정규 분포 노이즈는, 아래의 수학식을 통해 생성되는 시뮬레이션 방법. 여기서, 는 상기 에러 데이터의 평균을 나타내고, 은 분산을 나타내고, 은 상기 에러 데이터의 총량을 나타내고, 는 평균과 분산을 입력으로 하는 정규 분포를 나타낸다. |
| 15 | 제 1 항에 있어서, 상기 가상 인지 센서 데이터를 전송하는 단계는, CAN(Controller Area Network)을 통해 상기 동기화된 자율 주행 테스트 차량의 자율 주행 ECU(Electronic Control Unit)로 상기 가상 인지 센서 데이터를 전송하고, 상기 동기화된 자율 주행 테스트 차량은, 상기 가상 인지 센서 데이터에 기초하여 자율 주행을 수행하는 시뮬레이션 방법. |
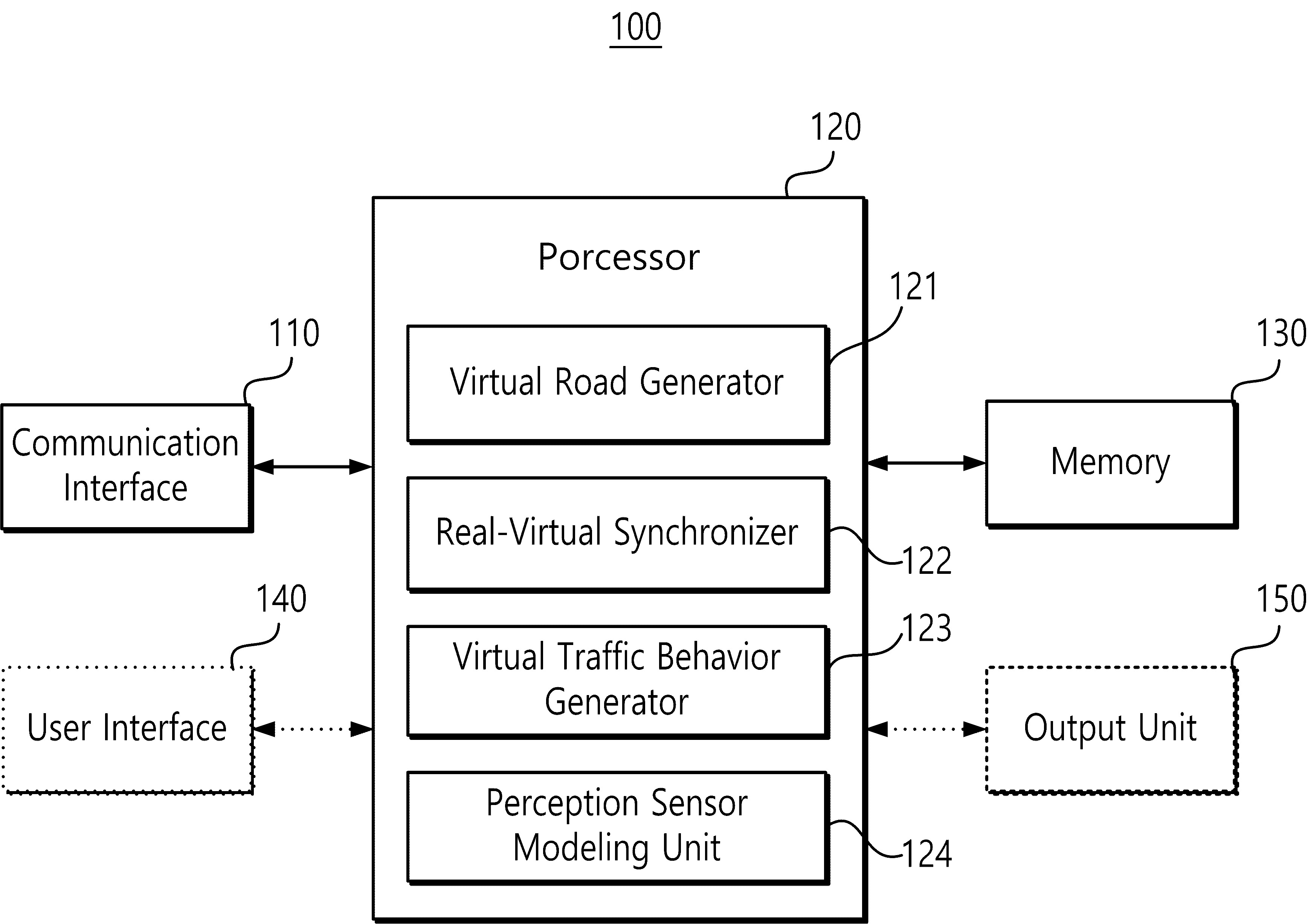
| 16 | 시뮬레이션 장치에 있어서, 자율 주행 테스트 차량과 통신하는 통신부; 및프로세서;를 포함하고, 상기 프로세서는, 가상 도로를 생성하고, 실제 주행 시험장(Proving Ground, PG)의 자율 주행 테스트 차량의 실제 위치 정보가 상기 통신부를 통해 수신되면, 상기 자율 주행 테스트 차량의 실제 위치 정보를 상기 가상 도로상의 가상 위치 정보로 변환하여 상기 자율 주행 테스트 차량의 위치와 상기 가상 도로상의 시뮬레이션 차량의 위치를 동기화하고, 이전에 수행된 상기 자율 주행 테스트 차량의 테스트 운행 동안 상기 자율 주행 테스트 차량의 주변에서 운행된 타겟 차량의 실제 거동 데이터에 기초하여 상기 가상 도로상에 가상 트래픽의 거동을 생성하고, 상기 동기화된 자율 주행 테스트 차량의 상태 정보 및 상기 가상 트래픽의 거동에 기초하여 상기 가상 트래픽에 대한 가상 인지 센서 데이터를 생성하고, 상기 동기화된 자율 주행 테스트 차량으로 상기 가상 인지 센서 데이터를 전송하도록 상기 통신부를 제어하고, 상기 프로세서는, 아래의 수학식을 통해 상기 실제 위치 정보를 상기 가상 위치 정보로 변환하고, 여기서, 는 상기 가상 도로의 시작 지점을 나타내고, 는 시뮬레이션 시작 시 상기 자율 주행 테스트 차량이 위치한 지점을 나타내고, 는 상기 가상 위치 정보를 나타내고, 는 상기 자율 주행 테스트 차량의 글로벌 위치를 나타내고, 는 상기 자율 주행 테스트 차량의 방향값을 나타내는, 시뮬레이션 장치. |
| 17 | 제 16 항에 있어서, 상기 가상 인지 센서 데이터는, 상기 동기화된 시뮬레이션 차량과 상기 가상 트래픽 간의 상대 거리 정보 및 상대 속도 정보를 포함하는 시뮬레이션 장치. |
| 18 | 제 17 항에 있어서, 상기 프로세서는, 상기 자율 주행 테스트 차량의 RTK-GPS 탑재 위치와 인지 센서 탑재 위치 간의 거리에 관한 정보, 상기 타겟 차량의 RTK-GPS 탑재 위치에 관한 정보, 및 상기 자율 주행 테스트 차량의 인지 센서가 상기 타겟 차량을 감지하는 지점에 관한 정보를 반영하여 상기 가상 인지 센서 데이터를 생성하는 시뮬레이션 장치. |
| 19 | 제 17 항에 있어서, 상기 상대 거리 정보는, 아래의 수학식을 통해 산출되는 시뮬레이션 장치. 여기서, 는 상기 자율 주행 테스트 차량에 탑재된 인지 센서를 나타내고, 는 상기 자율 주행 테스트 차량에 탑재된 인지 센서에 의해 감지되는 지점을 나타내고, 는 상기 동기화된 시뮬레이션 차량을 나타내고, 는 상기 가상 트래픽을 나타내고,는 글로벌 좌표를 나타내고, 는 상기 상대 거리를 나타내고, 는 상기 자율 주행 테스트 차량의 RTK-GPS 탑재 위치와 인지 센서 탑재 위치 간의 거리를 나타내고, 은 상기 타겟 차량의 RTK-GPS 탑재 위치와 상기 자율 주행 테스트 차량에 탑재된 인지 센서에 의해 감지되는 지점 사이의 거리를 나타낸다. |
| 20 | 시뮬레이션 장치의 프로세서에 의해 실행되는 경우 상기 시뮬레이션 장치가 동작을 수행하도록 하는 컴퓨터 명령을 저장하는 비일시적 컴퓨터 판독 가능 기록 매체에 있어서,상기 동작은, 가상 도로를 생성하는 단계;실제 주행 시험장(Proving Ground, PG)의 자율 주행 테스트 차량의 위치와 상기 가상 도로상의 시뮬레이션 차량의 위치를 동기화하는 단계; 이전에 수행된 상기 자율 주행 테스트 차량의 테스트 운행 동안 상기 자율 주행 테스트 차량의 주변에서 운행된 타겟 차량의 실제 거동 데이터에 기초하여 상기 가상 도로상에 가상 트래픽의 거동을 생성하는 단계; 상기 동기화된 자율 주행 테스트 차량의 상태 정보 및 상기 가상 트래픽의 거동에 기초하여 상기 가상 트래픽에 대한 가상 인지 센서 데이터를 생성하는 단계; 및 상기 동기화된 자율 주행 테스트 차량으로 상기 가상 인지 센서 데이터를 전송하는 단계;를 포함하고, 상기 동기화하는 단계는, 아래의 수학식을 통해 상기 자율 주행 테스트 차량의 실제 위치 정보를 상기 가상 도로상의 가상 위치 정보로 변환하는 단계;를 포함하고, 여기서, 는 상기 가상 도로의 시작 지점을 나타내고, 는 시뮬레이션 시작 시 상기 자율 주행 테스트 차량이 위치한 지점을 나타내고, 는 상기 가상 위치 정보를 나타내고, 는 상기 자율 주행 테스트 차량의 글로벌 위치를 나타내고, 는 상기 자율 주행 테스트 차량의 방향값을 나타내는, 기록 매체. |