| 번호 | 청구항 |
|---|---|
| 1 | 자율주행 차량의 가상 차선을 생성하는 장치에 있어서,제1 통신 방식에 기반하여 상기 자율주행 차량으로부터 소정 거리 내에 존재하는 복수의 스마트폴들을 통신 대상 그룹으로 그룹핑하는 제1 통신부;제2 통신 방식에 기반하여 상기 통신 대상 그룹에 포함되는 복수의 스마트폴들 각각에 대한 추정 거리를 획득하는 제2 통신부; 및상기 추정 거리 및 상기 복수의 스마트폴로부터 수신된 위치 정보에 기반하여 상기 자율주행 차량의 위치 좌표를 결정하고, 상기 결정된 위치 좌표에 따라 미리 지정된 개수에 대응하는 가상 차선을 생성하는 프로세서를 포함하고,상기 제2 통신부는,상기 제1 통신부에 의한 그룹핑 결과에 따라 복수의 스마트폴 중 유효 식별자를 갖는 스마트폴로부터 상기 유효 식별자를 포함하여 전송되는 ToF(Time of Flight) 측정값을 이용하여 상기 추정 거리를 획득하고,상기 프로세서는,각각의 스마트폴의 식별자에 매핑된 위치 데이터에 기반하여 상기 그룹핑된 스마트폴 중 이웃한 두 쌍의 위치를 각각 원점으로하고 각각의 ToF 측정값을 반지름으로 하는 두 원들을 생성하고, 상기 두 원들이 생성하는 교점에 기반하여 상기 자율주행 차량의 적어도 하나의 후보 위치를 계산하고, 상기 적어도 하나의 후보 위치를 이용하여 상기 자율주행 차량의 위치 좌표를 결정하고,상기 제1 통신부는,유효 기간 내에 응답 데이터가 수신되는 스마트폴이 미리 지정된 최소 개수 이상인 경우에, 상기 응답 데이터에 수신된 시간값의 순서에 기반하여 미리 지정된 최소 개수에 상응하는 통신 대상 그룹을 결정하고,상기 유효 기간 내에 응답 데이터가 수신되는 스마트폴이 미리 지정된 최소 개수 이하인 경우에, 상기 유효 기간을 재설정하는 가상 차선을 생성하는 장치. |
| 2 | 삭제 |
| 3 | 제1 항에 있어서,상기 제1 통신부는,미리 저장된 이전의 통신 결과로부터 상기 제1 통신 방식에 따른 통신을 수행한 후보 스마트폴 그룹을 설정하고,상기 후보 스마트폴 그룹에 발송된 전송 데이터의 시작 시점으로부터 상기 제1 통신 방식에 따라 결정되는 유효 기간 내에 응답 데이터가 수신되는 스마트폴을 상기 통신 대상 그룹으로 그룹핑하는 것을 특징으로 하는,가상 차선을 생성하는 장치. |
| 4 | 삭제 |
| 5 | 제1 항에 있어서,상기 프로세서는,상기 자율주행 차량의 위치 좌표에 대응하는 차선 개수에 설정값을 더한 값에 기반하여 생성될 가상 차선의 개수를 결정하고,상기 설정값은 강수량 데이터 또는 강우량 데이터에 의해 결정되는 것을 특징으로 하는,가상 차선을 생성하는 장치. |
| 6 | 삭제 |
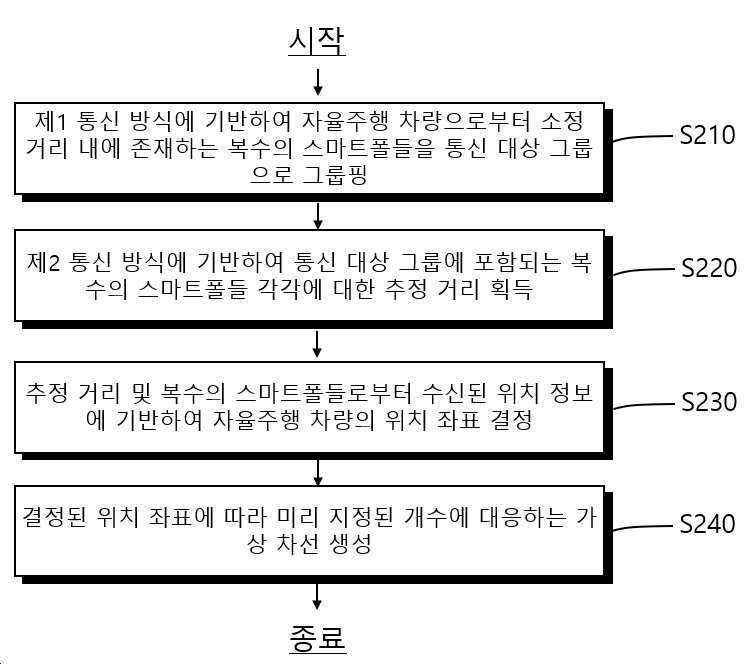
| 7 | 자율주행 차량의 가상 차선을 생성하는 방법에 있어서,제1 통신 방식에 기반하여 상기 자율주행 차량으로부터 소정 거리 내에 존재하는 복수의 스마트폴들을 통신 대상 그룹으로 그룹핑하는 단계;제2 통신 방식에 기반하여 상기 통신 대상 그룹에 포함되는 복수의 스마트폴들 각각에 대한 추정 거리를 획득하는 단계;상기 추정 거리 및 상기 복수의 스마트폴로부터 수신된 위치 정보에 기반하여 상기 자율주행 차량의 위치 좌표를 결정하는 단계; 및 상기 결정된 위치 좌표에 따라 미리 지정된 개수에 대응하는 가상 차선을 생성하는 단계를 포함하고,상기 제2 통신 방식에 기반하여 상기 통신 대상 그룹에 포함되는 복수의 스마트폴들 각각에 대한 추정 거리를 획득하는 단계는,상기 제1 통신부에 의한 그룹핑 결과에 따라 복수의 스마트폴 중 유효 식별자를 갖는 스마트폴로부터 상기 유효 식별자를 포함하여 전송되는 ToF(Time of Flight) 측정값을 이용하여 상기 추정 거리를 획득하는 것을 특징으로 하고,상기 추정 거리 및 상기 복수의 스마트폴로부터 수신된 위치 정보에 기반하여 상기 자율주행 차량의 위치 좌표를 결정하는 단계는,각각의 스마트폴의 식별자에 매핑된 위치 데이터에 기반하여 상기 그룹핑된 스마트폴 중 이웃한 두 쌍의 위치를 각각 원점으로하고 각각의 ToF 측정값을 반지름으로 하는 두 원들을 생성하는 단계;상기 두 원들이 생성하는 교점에 기반하여 상기 자율주행 차량의 적어도 하나의 후보 위치를 계산하고, 상기 적어도 하나의 후보 위치를 이용하여 상기 자율주행 차량의 위치 좌표를 결정하는 단계를 포함하고,상기 제1 통신 방식에 기반하여 상기 자율주행 차량으로부터 소정 거리 내에 존재하는 복수의 스마트폴들을 통신 대상 그룹으로 그룹핑하는 단계는,유효 기간 내에 응답 데이터가 수신되는 스마트폴이 미리 지정된 최소 개수 이상인 경우에, 상기 응답 데이터에 수신된 시간값의 순서에 기반하여 미리 지정된 최소 개수에 상응하는 통신 대상 그룹을 결정하는 단계;상기 유효 기간 내에 응답 데이터가 수신되는 스마트폴이 미리 지정된 최소 개수 이하인 경우에, 상기 유효 기간을 재설정하는 단계를 포함하는 가상 차선을 생성하는 방법. |
| 8 | 삭제 |
| 9 | 제7 항에 있어서,상기 제1 통신 방식에 기반하여 상기 자율주행 차량으로부터 소정 거리 내에 존재하는 복수의 스마트폴들을 통신 대상 그룹으로 그룹핑하는 단계는,미리 저장된 이전의 통신 결과로부터 상기 제1 통신 방식에 따른 통신을 수행한 후보 스마트폴 그룹을 설정하는 단계; 및상기 후보 스마트폴 그룹에 발송된 전송 데이터의 시작 시점으로부터 상기 제1 통신 방식에 따라 결정되는 유효 기간 내에 응답 데이터가 수신되는 스마트폴을 상기 통신 대상 그룹으로 그룹핑하는 단계를 포함하는,가상 차선을 생성하는 방법. |
| 10 | 삭제 |
| 11 | 제7 항에 있어서,상기 결정된 위치 좌표에 따라 미리 지정된 개수에 대응하는 가상 차선을 생성하는 단계는,상기 자율주행 차량의 위치 좌표에 대응하는 차선 개수에 설정값을 더한 값에 기반하여 생성될 가상 차선의 개수를 결정하고,상기 설정값은 강수량 데이터 또는 강우량 데이터에 의해 결정되는 것을 특징으로 하는,가상 차선을 생성하는 방법. |
| 12 | 삭제 |