| 번호 | 청구항 |
|---|---|
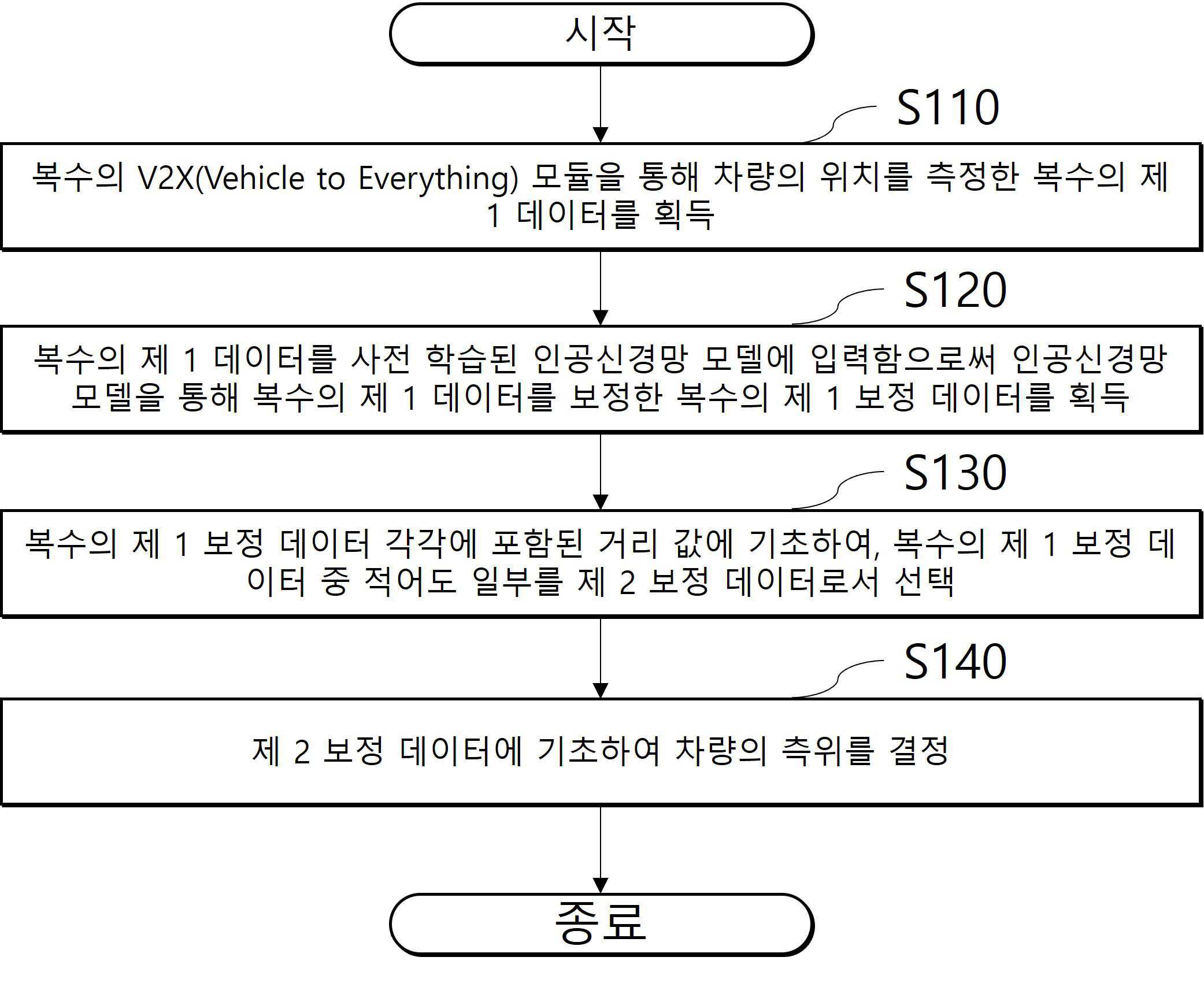
| 1 | 적어도 하나의 프로세서를 포함하는 컴퓨팅 장치에 의해 수행되는 차량의 측위를 결정하기 위한 방법으로서,복수의 V2X(Vehicle to Everything) 모듈을 통해 차량의 위치를 측정한 복수의 제 1 데이터를 획득하는 단계;상기 복수의 제 1 데이터를 사전 학습된 인공신경망 모델에 입력함으로써 상기 인공신경망 모델을 통해 상기 복수의 제 1 데이터를 보정한 복수의 제 1 보정 데이터를 획득하는 단계;상기 복수의 제 1 보정 데이터 각각에 포함된 거리 값에 기초하여, 상기 복수의 제 1 보정 데이터 중 적어도 일부를 제 2 보정 데이터로서 선택하는 단계; 및상기 제 2 보정 데이터에 기초하여 상기 차량의 측위를 결정하는 단계;를 포함하고,상기 복수의 제 1 데이터는,제 1 V2X 모듈을 통해 제 1 시간 구간에 상기 차량의 위치를 측정한 제 1-1 데이터 및 상기 제 1 V2X 모듈을 통해 상기 제 1 시간 구간 보다 앞선 제 2 시간 구간에 상기 차량의 위치를 측정한 적어도 하나의 제 1-2 데이터, 제 2 V2X 모듈을 통해 상기 제 1 시간 구간에 대응하는 제 3 시간 구간에 상기 차량의 위치를 측정한 제 2-1 데이터 및 상기 제 2 V2X 모듈을 통해 상기 제 3 시간 구간 보다 앞선 제 4 시간 구간에 상기 차량의 위치를 측정한 적어도 하나의 제 2-2 데이터 중 적어도 하나를 포함하고,상기 복수의 제 1 보정 데이터는,상기 제 1-1 데이터, 상기 적어도 하나의 제 1-2 데이터, 상기 제 2-1 데이터 및 상기 적어도 하나의 제 2-2 데이터에 기초하여 결정되는 제 1-1 보정 데이터를 포함하는,차량의 측위를 결정하기 위한 방법. |
| 2 | 삭제 |
| 3 | 제 1 항에 있어서,상기 복수의 제 1 데이터는,ToF(Time of Flight) 카메라 기반의 상기 복수의 V2X 모듈을 통해 측정된 데이터인,차량의 측위를 결정하기 위한 방법. |
| 4 | 제 1 항에 있어서,상기 인공신경망 모델은,상기 복수의 제 1 데이터에 기초하여 상기 복수의 V2X 모듈 간의 거리에 대한 상태 변수의 결합 분포도를 결정하고, 결정된 상기 결합 분포도에 기초하여 상기 복수의 제 1 데이터의 노이즈를 보정한 복수의 제 1 예비 데이터를 출력하는 칼만 필터(Kalman Filter);상기 복수의 제 1 예비 데이터 중 가장 최근에 획득된 제 1-1 예비 데이터를 기준으로 하여, 상기 복수의 제 1 예비 데이터에 포함된 상기 제 1-1 예비 데이터 및 상기 제 1-1 예비 데이터를 제외한 복수의 제 1-2 예비 데이터 간의 유사도를 분석하기 위한 복수의 행렬을 생성하는 생성기(generator) 모델; 및상기 복수의 행렬을 입력값으로 하고, 상기 입력값으로부터 상기 복수의 제 1 보정 데이터를 출력하는 트랜스포머 인코더(transformer encoder);를 포함하는,차량의 측위를 결정하기 위한 방법. |
| 5 | 제 4 항에 있어서,상기 생성기 모델은,상기 복수의 제 1 예비 데이터를 순차적으로 입력받아 Key 값으로써 제 1 행렬을 생성하는 RNN(Recurrent Neural Networks) 또는 LSTM(Long Short-Term Memory) 기반의 K 제너레이터;상기 복수의 제 1 예비 데이터를 순차적으로 입력받아 Value 값으로써 제 2 행렬을 생성하는 RNN 또는 LSTM 기반의 V 제너레이터; 및상기 제 1-1 예비 데이터를 입력받아 제 3 행렬을 생성하는 Q 제너레이터;를 포함하는,차량의 측위를 결정하기 위한 방법. |
| 6 | 제 5 항에 있어서,상기 K 제너레이터는,사전 설정된 가중치가 행렬 구조로 존재하는 RNN 또는 LSTM 계열의 레이어를 포함하고,스칼라 값으로 존재하는 상기 복수의 제 1 예비 데이터가 입력된 경우, 상기 스칼라 값 및 상기 행렬 구조의 가중치의 연산을 통해 상기 제 1 행렬을 생성하고,상기 V 제너레이터는,사전 설정된 가중치가 행렬로서 존재하는 RNN 또는 LSTM 계열의 레이어를 포함하고, 그리고스칼라 값으로 존재하는 상기 복수의 제 1 예비 데이터가 입력된 경우, 상기 스칼라 값 및 상기 행렬 구조의 가중치의 연산을 통해 상기 제 2 행렬을 생성하는,차량의 측위를 결정하기 위한 방법. |
| 7 | 제 5 항에 있어서,상기 인공신경망 모델은,상기 제 1 행렬 및 상기 제 3 행렬 간의 유사도를 분석하여 제 1 유사도를 결정하고, 상기 제 1 유사도에 기초하여 상기 제 2 행렬을 가공한 제 4 행렬을 생성하는 어텐션 모델(attention model);을 더 포함하고,상기 트랜스포머 인코더는,상기 제 4 행렬을 입력값으로 하고, 상기 입력값으로부터 상기 복수의 제 1 보정 데이터를 출력하는,차량의 측위를 결정하기 위한 방법. |
| 8 | 제 1 항에 있어서,상기 복수의 제 1 보정 데이터 각각에 포함된 거리 값에 기초하여, 상기 복수의 제 1 보정 데이터 중 적어도 일부를 제 2 보정 데이터로서 선택하는 단계는,상기 복수의 제 1 보정 데이터 각각에 포함된 상기 거리 값을 결정하는 단계; 및상기 거리 값에 기초하여 상기 복수의 제 1 보정 데이터 중 세개의 보정 데이터를 상기 제 2 보정 데이터로서 선택하는 단계;를 포함하는,차량의 측위를 결정하기 위한 방법. |
| 9 | 제 1 항에 있어서,상기 제 2 보정 데이터에 기초하여 상기 차량의 측위를 결정하는 단계는,삼변측량법(Trilateration)에 기초하여 상기 제 2 보정 데이터로부터 상기 차량의 측위를 결정하는 단계;를 포함하는,차량의 측위를 결정하기 위한 방법. |
| 10 | 차량의 측위를 결정하기 위한 컴퓨팅 장치로서,복수의 V2X(Vehicle to Everything) 모듈을 통해 차량의 위치를 측정한 복수의 제 1 데이터를 획득하고, 상기 복수의 제 1 데이터를 사전 학습된 인공신경망 모델에 입력함으로써 상기 인공신경망 모델을 통해 상기 복수의 제 1 데이터를 보정한 복수의 제 1 보정 데이터를 획득하고, 상기 복수의 제 1 보정 데이터 각각에 포함된 거리 값에 기초하여, 상기 복수의 제 1 보정 데이터 중 적어도 일부를 제 2 보정 데이터로서 선택하고, 그리고 상기 제 2 보정 데이터에 기초하여 상기 차량의 측위를 결정하는 제어부;를 포함하고,상기 복수의 제 1 데이터는,제 1 V2X 모듈을 통해 제 1 시간 구간에 상기 차량의 위치를 측정한 제 1-1 데이터 및 상기 제 1 V2X 모듈을 통해 상기 제 1 시간 구간 보다 앞선 제 2 시간 구간에 상기 차량의 위치를 측정한 적어도 하나의 제 1-2 데이터, 제 2 V2X 모듈을 통해 상기 제 1 시간 구간에 대응하는 제 3 시간 구간에 상기 차량의 위치를 측정한 제 2-1 데이터 및 상기 제 2 V2X 모듈을 통해 상기 제 3 시간 구간 보다 앞선 제 4 시간 구간에 상기 차량의 위치를 측정한 적어도 하나의 제 2-2 데이터 중 적어도 하나를 포함하고,상기 복수의 제 1 보정 데이터는,상기 제 1-1 데이터, 상기 적어도 하나의 제 1-2 데이터, 상기 제 2-1 데이터 및 상기 적어도 하나의 제 2-2 데이터에 기초하여 결정되는 제 1-1 보정 데이터를 포함하는,컴퓨팅 장치. |
| 11 | 삭제 |
| 12 | 제 10 항에 있어서,상기 복수의 제 1 데이터는,ToF(Time of Flight) 카메라 기반의 상기 복수의 V2X 모듈을 통해 측정된 데이터인,컴퓨팅 장치. |
| 13 | 제 10 항에 있어서,상기 인공신경망 모델은,상기 복수의 제 1 데이터에 기초하여 상기 복수의 V2X 모듈 간의 거리에 대한 상태 변수의 결합 분포도를 결정하고, 결정된 상기 결합 분포도에 기초하여 상기 복수의 제 1 데이터의 노이즈를 보정한 복수의 제 1 예비 데이터를 출력하는 칼만 필터(Kalman Filter);상기 복수의 제 1 예비 데이터 중 가장 최근에 획득된 제 1-1 예비 데이터를 기준으로 하여, 상기 복수의 제 1 예비 데이터에 포함된 상기 제 1-1 예비 데이터 및 상기 제 1-1 예비 데이터를 제외한 복수의 제 1-2 예비 데이터 간의 유사도를 분석하기 위한 복수의 행렬을 생성하는 생성기(generator) 모델; 및상기 복수의 행렬을 입력값으로 하고, 상기 입력값으로부터 상기 복수의 제 1 보정 데이터를 출력하는 트랜스포머 인코더(transformer encoder);를 포함하는,컴퓨팅 장치. |
| 14 | 제 13 항에 있어서,상기 생성기 모델은,상기 복수의 제 1 예비 데이터를 순차적으로 입력받아 Key 값으로써 제 1 행렬을 생성하는 RNN(Recurrent Neural Networks) 또는 LSTM(Long Short-Term Memory) 기반의 K 제너레이터;상기 복수의 제 1 예비 데이터를 순차적으로 입력받아 Value 값으로써 제 2 행렬을 생성하는 RNN 또는 LSTM 기반의 V 제너레이터; 및상기 제 1-1 예비 데이터를 입력받아 제 3 행렬을 생성하는 Q 제너레이터;를 포함하는,컴퓨팅 장치. |
| 15 | 제 14 항에 있어서,상기 K 제너레이터는,사전 설정된 가중치가 행렬 구조로 존재하는 RNN 또는 LSTM 계열의 레이어를 포함하고,스칼라 값으로 존재하는 상기 복수의 제 1 예비 데이터가 입력된 경우, 상기 스칼라 값 및 상기 행렬 구조의 가중치의 연산을 통해 상기 제 1 행렬을 생성하고,상기 V 제너레이터는,사전 설정된 가중치가 행렬로서 존재하는 RNN 또는 LSTM 계열의 레이어를 포함하고, 그리고스칼라 값으로 존재하는 상기 복수의 제 1 예비 데이터가 입력된 경우, 상기 스칼라 값 및 상기 행렬 구조의 가중치의 연산을 통해 상기 제 2 행렬을 생성하는,컴퓨팅 장치. |
| 16 | 제 14 항에 있어서,상기 인공신경망 모델은,상기 제 1 행렬 및 상기 제 3 행렬 간의 유사도를 분석하여 제 1 유사도를 결정하고, 상기 제 1 유사도에 기초하여 상기 제 2 행렬을 가공한 제 4 행렬을 생성하는 어텐션 모델(attention model);을 더 포함하고,상기 트랜스포머 인코더는,상기 제 4 행렬을 입력값으로 하고, 상기 입력값으로부터 상기 복수의 제 1 보정 데이터를 출력하는,컴퓨팅 장치. |
| 17 | 제 10 항에 있어서,상기 제어부는, 상기 복수의 제 1 보정 데이터 각각에 포함된 상기 거리 값을 결정하고, 그리고 상기 거리 값에 기초하여 상기 복수의 제 1 보정 데이터 중 세개의 보정 데이터를 상기 제 2 보정 데이터로서 선택하는,컴퓨팅 장치. |