| 번호 | 청구항 |
|---|---|
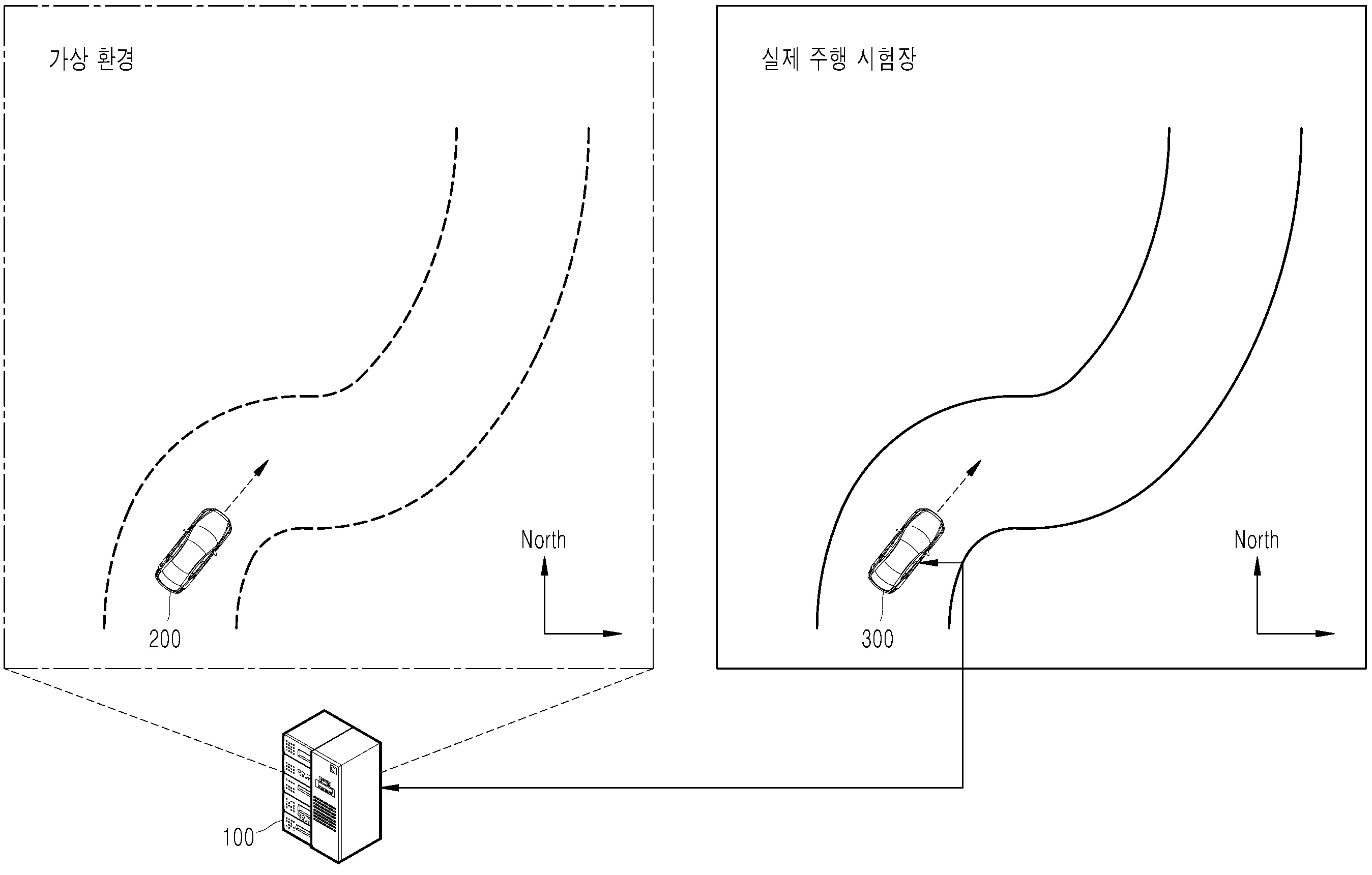
| 1 | 실차 기반 시뮬레이션 장치의 시뮬레이션 방법으로서,상기 시뮬레이션 장치에서 구현되는 가상 환경의 시뮬레이션 차량의 시작 위치와 실제 주행 시험장(proving ground, PG)의 실제 차량의 시작 위치를 동기화하는 단계;상기 실제 주행 시험장에서 이동하는 상기 실제 차량에 장착된 센서에서 측정된 거동 정보를 상기 실제 차량으로부터 수신하는 단계;상기 거동 정보에 포함된 정보의 종류를 판단하고, 상기 거동 정보에 포함된 정보의 종류에 기반하여 상기 실제 차량의 연속된 거동 정보를 추정하는 방법을 결정하는 단계; 및상기 연속된 거동 정보를 추정하는 방법에 기반하여 상기 실제 차량의 상기 연속된 거동 정보를 추정하고, 추정된 상기 실제 차량의 상기 연속된 거동 정보에 기반하여 상기 가상 환경의 상기 시뮬레이션 차량의 위치를 결정하는 단계를 포함하는,실차 기반 시뮬레이션 장치의 시뮬레이션 방법. |
| 2 | 제1 항에 있어서,상기 연속된 거동 정보를 추정하는 방법을 결정하는 단계는, 상기 거동 정보에 상기 실제 차량의 속도 및 가속도가 포함되어 있는지 판단하는 단계; 및상기 실제 차량의 속도 및 가속도가 포함되어 있는 경우 외삽 추정 기법에 기반하여 상기 연속된 거동 정보를 추정하고, 상기 실제 차량의 속도 및 가속도가 포함되어 있지 않은 경우 칼만 필터에 기반하여 상기 연속된 거동 정보를 추정하는 단계를 포함하는,실차 기반 시뮬레이션 장치의 시뮬레이션 방법. |
| 3 | 제1 항에 있어서,상기 거동 정보의 품질을 판단하는 단계; 및상기 거동 정보의 상기 품질이 미리 설정된 기준에 도달하지 못하는 경우, 상기 시뮬레이션 차량의 이전에 추정된 상기 연속된 거동 정보에 기반하여 상기 시뮬레이션 차량의 현재의 위치를 결정하는 단계를 더 포함하는,실차 기반 시뮬레이션 장치의 시뮬레이션 방법. |
| 4 | 제3 항에 있어서,상기 거동 정보의 품질을 판단하는 단계는,상기 거동 정보에 포함된 GNSS(Global Navigation Satellite System)의 위성 개수에 기반하여 상기 거동 정보의 품질을 판단하는 단계를 포함하는,실차 기반 시뮬레이션 장치의 시뮬레이션 방법. |
| 5 | 제1 항에 있어서,상기 시뮬레이션 차량의 위치에 기반하여 상기 실제 차량이 상기 실제 주행 시험장의 미리 설정된 경계로부터 미리 설정된 범위 이내에 존재하는지 판단하는 단계; 상기 실제 차량이 상기 실제 주행 시험장의 상기 경계로부터 미리 설정된 범위 이내에 위치한 경우, 상기 실제 차량의 운전자에게 제어권 전환 필요성을 경고하도록 야기하는 명령을 송신하는 단계; 및상기 경고로부터 미리 설정된 시간 이내에 상기 운전자로 제어권이 전환되지 않는 경우, 상기 실제 차량에 비상 정지 명령을 송신하는 단계를 더 포함하는,실차 기반 시뮬레이션 장치의 시뮬레이션 방법. |
| 6 | 제1 항에 있어서,상기 실제 차량에서 감지한 객체 정보를 수신하는 단계;상기 실제 차량의 운전자에게 제어권 전환 필요성을 경고하도록 야기하는 명령을 송신하는 단계; 및상기 경고로부터 미리 설정된 시간 이내에 상기 운전자로 제어권이 전환되지 않는 경우, 상기 실제 차량에 비상 정지 명령을 송신하는 단계를 더 포함하는,실차 기반 시뮬레이션 장치의 시뮬레이션 방법. |
| 7 | 제6 항에 있어서,상기 제어권 전환 필요성을 경고하도록 야기하는 명령을 송신하는 단계는,상기 객체 정보와 상기 가상 환경에 설정되어 있는 객체를 비교하는 단계; 및상기 객체 정보가 상기 가상 환경에 설정되어 있는 객체와 다른 경우, 상기 제어권 전환 필요성을 경고하도록 야기하는 명령을 송신하는 단계를 포함하는,실차 기반 시뮬레이션 장치의 시뮬레이션 방법. |
| 8 | 프로세서; 시뮬레이션 차량이 주행하는 가상 환경 정보를 저장하는 저장부; 및상기 프로세서와 전기적으로 연결되고, 상기 프로세서에서 수행되는 적어도 하나의 코드(code)가 저장되는 메모리를 포함하고,상기 메모리는 상기 프로세서를 통해 실행될 때 상기 프로세서가,상기 가상 환경의 시뮬레이션 차량의 시작 위치와 실제 주행 시험장(proving ground, PG)의 실제 차량의 시작 위치를 동기화하고, 상기 실제 주행 시험장에서 이동하는 상기 실제 차량에 장착된 센서에서 측정된 거동 정보를 상기 실제 차량으로부터 수신하고,상기 거동 정보에 포함된 정보의 종류를 판단하고, 상기 거동 정보에 포함된 정보의 종류에 기반하여 상기 실제 차량의 연속된 거동 정보를 추정하는 방법을 결정하고,상기 연속된 거동 정보를 추정하는 방법에 기반하여 상기 실제 차량의 상기 연속된 거동 정보를 추정하고, 추정된 상기 실제 차량의 상기 연속된 거동 정보에 기반하여 상기 가상 환경의 상기 시뮬레이션 차량의 위치를 결정하도록 야기하는 코드를 저장하는,실차 기반 시뮬레이션 장치. |
| 9 | 제8 항에 있어서,상기 메모리는 상기 프로세서로 하여금, 상기 거동 정보에 상기 실제 차량의 속도 및 가속도가 포함되어 있는지 판단하고,상기 실제 차량의 속도 및 가속도가 포함되어 있는 경우 외삽 추정 기법에 기반하여 상기 연속된 거동 정보를 추정하고, 상기 실제 차량의 속도 및 가속도가 포함되어 있지 않은 경우 칼만 필터에 기반하여 상기 연속된 거동 정보를 추정하도록 야기하는 코드를 더 자장하는,실차 기반 시뮬레이션 장치. |
| 10 | 제8 항에 있어서,상기 메모리는 상기 프로세서로 하여금, 상기 거동 정보의 품질을 판단하고,상기 거동 정보의 상기 품질이 미리 설정된 기준에 도달하지 못하는 경우, 상기 시뮬레이션 차량의 이전에 추정된 상기 연속된 거동 정보에 기반하여 상기 시뮬레이션 차량의 현재의 위치를 결정하도록 야기하는 코드를 더 저장하는,실차 기반 시뮬레이션 장치. |
| 11 | 제10 항에 있어서,상기 메모리는 상기 프로세서로 하여금, 상기 거동 정보에 포함된 GNSS(Global Navigation Satellite System)의 위성 개수에 기반하여 상기 거동 정보의 품질을 판단하도록 야기하는 코드를 더 저장하는,실차 기반 시뮬레이션 장치. |
| 12 | 제8 항에 있어서,상기 메모리는 상기 프로세서로 하여금, 상기 시뮬레이션 차량의 위치에 기반하여 상기 실제 차량이 상기 실제 주행 시험장의 미리 설정된 경계로부터 미리 설정된 범위 이내에 존재하는지 판단하고, 상기 실제 차량이 상기 실제 주행 시험장의 상기 경계로부터 미리 설정된 범위 이내에 위치한 경우, 상기 실제 차량의 운전자에게 제어권 전환 필요성을 경고하도록 야기하는 명령을 송신하고,상기 경고로부터 미리 설정된 시간 이내에 상기 운전자로 제어권이 전환되지 않는 경우, 상기 실제 차량에 비상 정지 명령을 송신하도록 야기하는 코드를 더 저장하는,실차 기반 시뮬레이션 장치. |
| 13 | 제8 항에 있어서,상기 메모리는 상기 프로세서로 하여금, 상기 실제 차량에서 감지한 객체 정보를 수신하고,상기 실제 차량의 운전자에게 제어권 전환 필요성을 경고하도록 야기하는 명령을 송신하고,상기 경고로부터 미리 설정된 시간 이내에 상기 운전자로 제어권이 전환되지 않는 경우, 상기 실제 차량에 비상 정지 명령을 송신하도록 야기하는 코드를 더 저장하는,실차 기반 시뮬레이션 장치. |
| 14 | 제13 항에 있어서,상기 메모리는 상기 프로세서로 하여금, 상기 객체 정보와 상기 가상 환경에 설정되어 있는 객체를 비교하고,상기 객체 정보가 상기 가상 환경에 설정되어 있는 객체와 다른 경우, 상기 제어권 전환 필요성을 경고하도록 야기하는 명령을 송신하도록 야기하는 코드를 더 저장하는,실차 기반 시뮬레이션 장치. |