| 번호 | 청구항 |
|---|---|
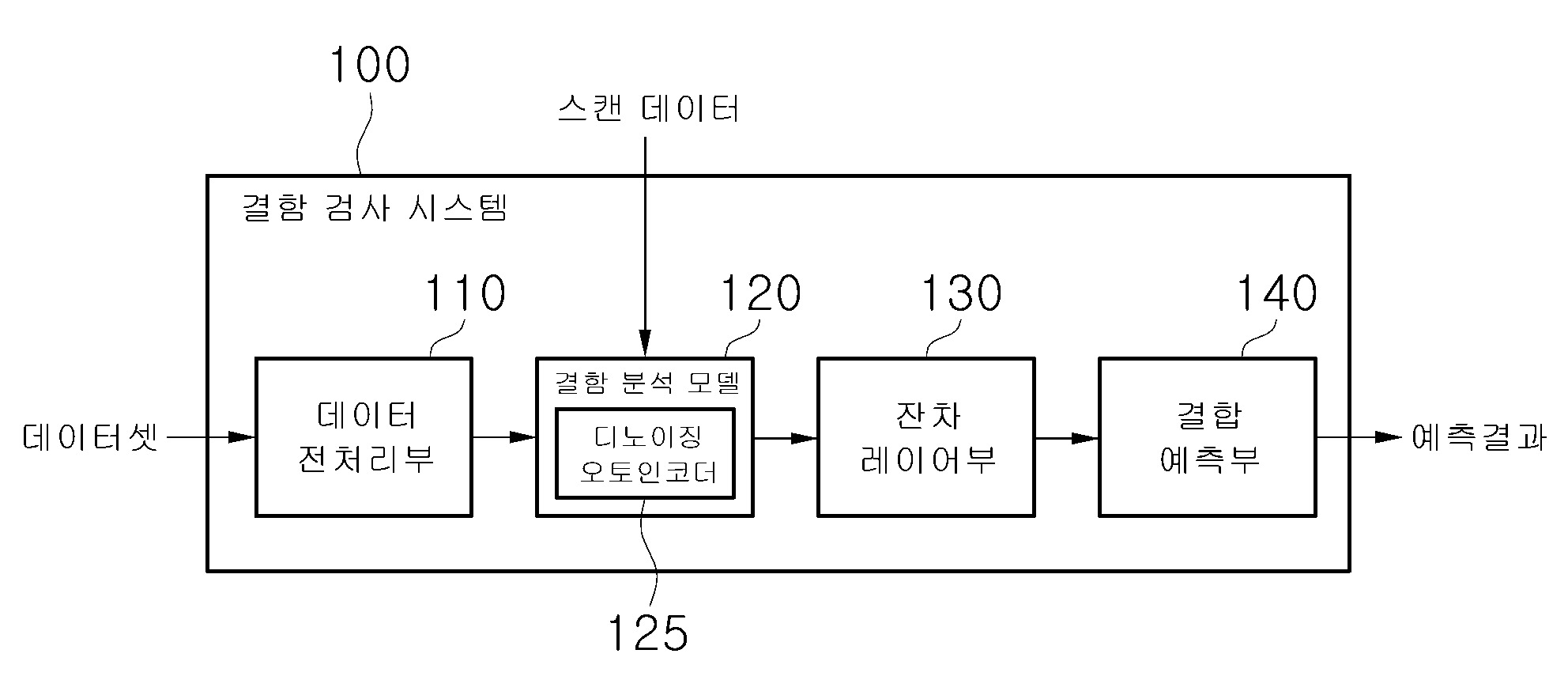
| 1 | 시편에 대한 스캔에 따라 생성되는 원본신호 및 상기 원본신호에 결합되는 임의의 결함신호를 포함하는 데이터 셋을 생성하는 데이터 전처리부;상기 복수의 데이터 셋을 입력받아 상기 결함신호가 제거된 원본신호를 출력하도록 학습되는 디노이징 오토 인코더를 포함하는 결함 분석 모델;학습이 완료된 상기 결함 분석 모델에 검사 대상체에 대한 스캔 데이터가 입력됨에 따라, 상기 결함 분석 모델이 출력하는 원본신호와, 입력된 스캔 데이터와의 잔차를 통해 결함신호를 출력하는 잔차 레이어부; 및상기 결함신호에 통계적 임계치를 적용하여 상기 검사 대상체 상의 결함의 위치 및 깊이를 예측하는 결함 예측부를 포함하는 자기지도학습 기반 비파괴 검사 시스템. |
| 2 | 제 1 항에 있어서,상기 데이터 전처리부는,초음파를 상기 시편을 향해 방사함에 따라 해당 바닥면에 대하여 생성된 반사신호를 증강하여 상기 데이터 셋을 생성하는 것인, 자기지도학습 기반 비파괴 검사 시스템. |
| 3 | 제 2 항에 있어서,상기 데이터 전처리부는,상기 반사신호에 대하여 랜덤 스케일링 인자를 통해 진폭을 변경하여 증강시키고, 스캔 데이터의 무작위 위치에 결합하는 것인, 자기지도학습 기반 비파괴 검사 시스템. |
| 4 | 제 3 항에 있어서,상기 디노이징 오토 인코더는,원본신호(x) 및 상기 원본신호(x)에 컷페이스트 방식으로 추가된 결함신호(y)로 구성되는 스캔 데이터를 입력받아 압축하는 인코더;압축된 벡터(z)를 스캔 데이터와 동일한 크기의 출력 데이터로 출력하는 디코더를 포함하는 자기지도학습 기반 비파괴 검사 시스템. |
| 5 | 제 4 항에 있어서, 상기 디노이징 오토 인코더의 손실함수는, 이하의 수학식,으로 표현되는 것인, 자기지도학습 기반 비파괴 검사 시스템(단, x는 원본신호, y는 결함신호, x+y는 임의로 결함을 인가한 신호, f는 인코더, g는 디코더,φ, ø는 각각 인코더와 디코더의 파라미터). |
| 6 | 제 5 항에 있어서,상기 결함 예측부는,상기 결함신호의 절대값 평균을 산출하고, 산출된 절대값 평균이 통계적 임계치(μ+3σ)의 초과시 결함으로 판단하는 것인, 자기지도학습 기반 비파괴 검사 시스템. |
| 7 | 제 6 항에 있어서,상기 결함 예측부는,결함으로 판단된 결함신호에 대하여 채공시간(TOF)을 통해 결함의 깊이를 산출하고, 상기 채공시간은 이하의 수학식,으로 산출되는 것인, 자기지도학습 기반 비파괴 검사 시스템. |
| 8 | 자기지도학습 기반 비파괴 검사 시스템을 이용한 검사 대상체에 대한 비파괴 검사 방법으로서,시편에 대한 스캔에 따라 생성되는 원본신호 및 상기 원본신호에 부여되는 임의의 결함신호를 포함하는 복수의 데이터 셋을 생성하는 단계;디노이징 오토 인코더를 포함하는 결함 분석 모델에 상기 복수의 데이터 셋을 입력하여 상기 결함신호가 제거된 원본신호를 출력하도록 학습시키는 단계;학습이 완료된 상기 결함 분석 모델에 검사 대상체에 대한 스캔 데이터를 입력하여 상기 결함 분석 모델이 출력하는 원본신호와, 입력된 스캔 데이터와의 잔차를 통해 결함신호를 출력하는 단계; 및,상기 결함신호에 통계적 임계치를 적용하여 상기 검사 대상체 상의 결함의 위치 및 깊이를 예측하는 단계를 포함하는 자기지도학습 기반 비파괴 검사 방법. |
| 9 | 제 8 항에 있어서,상기 시편에 대한 스캔에 따라 생성되는 원본신호 및 상기 원본신호에 부여되는 임의의 결함신호를 포함하는 복수의 데이터 셋을 생성하는 단계는, 초음파를 상기 시편을 향해 방사함에 따라 해당 바닥면에 대하여 반사신호를 생성하는 단계;상기 반사신호에 대하여 랜덤 스케일링 인자를 통해 진폭을 변경하여 증강시키는 단계; 및 원본신호의 무작위 위치에 결합하는 단계를 포함하는 자기지도학습 기반 비파괴 검사 방법. |
| 10 | 제 9 항에 있어서,상기 디노이징 오토 인코더는,원본신호(x) 및 상기 원본신호(x)에 컷페이스트 방식으로 추가된 결함신호(y)로 구성되는 스캔 데이터를 입력받아 압축하는 인코더; 및압축된 벡터(z)를 스캔 데이터와 동일한 크기의 출력 데이터로 출력하는 디코더를 포함하는 자기지도학습 기반 비파괴 검사 방법. |
| 11 | 제 10 항에 있어서, 상기 디노이징 오토 인코더의 손실함수는, 이하의 수학식, 으로 표현되는 것인, 자기지도학습 기반 비파괴 검사 방법(단, x는 원본신호, y는 결함신호, x+y는 임의로 결함을 인가한 신호, f는 인코더, g는 디코더,φ, ø는 각각 인코더와 디코더의 파라미터). |
| 12 | 제 10 항에 있어서,상기 결함신호에 통계적 임계치를 적용하여 상기 검사 대상체 상의 결함의 위치 및 깊이를 예측하는 단계는,상기 결함신호의 절대값 평균을 산출하는 단계; 및산출된 절대값 평균이 통계적 임계치(μ+3σ)의 초과시 결함으로 판단하는 단계를 포함하는 자기지도학습 기반 비파괴 검사 방법. |
| 13 | 제 12 항에 있어서,상기 산출된 절대값 평균이 통계적 임계치(μ+3σ)의 초과시 결함으로 판단하는 단계 이후,결함으로 판단된 결함신호에 대하여 채공시간(TOF)을 통해 결함의 깊이를 산출하는 단계를 포함하고, 상기 채공시간은 이하의 수학식,으로 산출되는 것인, 자기지도학습 기반 비파괴 검사 방법. |