| 번호 | 청구항 |
|---|---|
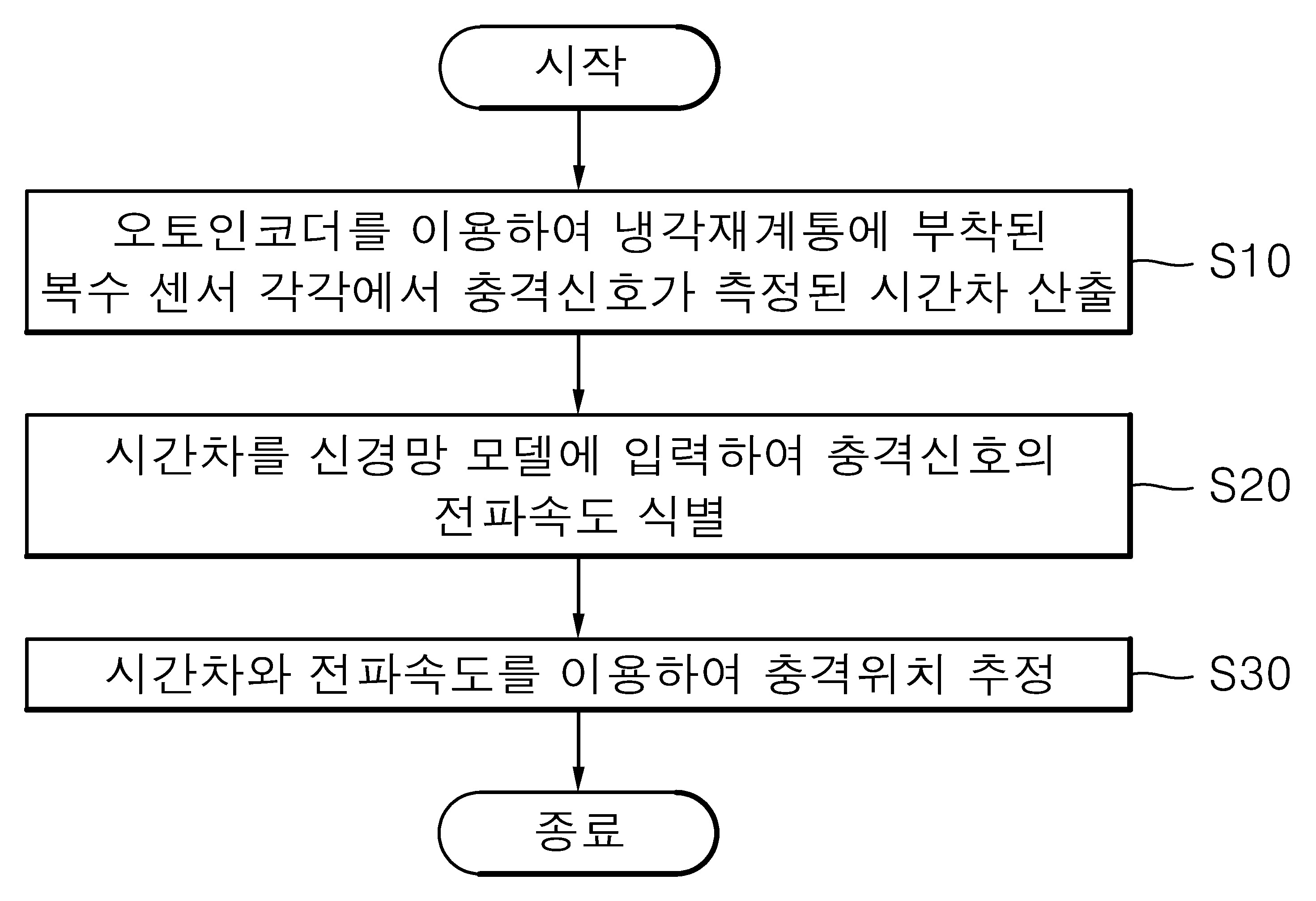
| 1 | 오토인코더(AutoEncoder)를 이용하여 냉각재계통(Reactor Coolant System; RCS)에 부착된 복수의 센서 각각에서 충격신호가 측정된 시간차를 산출하는 단계;상기 시간차를 신경망 모델에 입력하여 상기 충격신호의 전파속도를 식별하는 단계; 및상기 시간차와 상기 전파속도를 이용하여 충격위치를 추정하는 단계를 포함하는금속 파편 위치 추정 방법. |
| 2 | 제1항에 있어서,상기 복수의 센서는 가속도 센서인금속 파편 위치 추정 방법. |
| 3 | 제1항에 있어서,상기 냉각재계통은 증기발생기(steam generator)이고, 상기 복수의 센서는 상기 증기발생기 외벽의 미리 설정된 위치에 부착되는금속 파편 위치 추정 방법. |
| 4 | 제1항에 있어서,상기 오토인코더는 상기 복수의 센서에서 수집된 신호로부터 특징을 추출하는 인코더와 상기 추출된 특징으로부터 복원신호를 생성하는 디코더를 포함하는금속 파편 위치 추정 방법. |
| 5 | 제1항에 있어서,상기 복수의 센서에서 수집된 정상신호에 기초하여 오토인코더를 학습시키는 단계를 더 포함하는금속 파편 위치 추정 방법. |
| 6 | 제5항에 있어서,상기 오토인코더를 학습시키는 단계는상기 정상신호를 상기 오토인코더에 입력하고, 상기 오토인코더에서 출력된 복원신호와 상기 정상신호의 차이가 최소가 되도록 상기 오토인코더를 비지도 학습(unsupervised learning)시키는 단계를 포함하는금속 파편 위치 추정 방법. |
| 7 | 제1항에 있어서,상기 시간차를 산출하는 단계는상기 센서별로 수집된 복수의 충격신호를 상기 오토인코더에 각각 입력하여 충격신호별로 시간에 따른 재구성 오차를 산출하는 단계와,상기 재구성 오차가 기준값을 초과하는 충격시점을 상기 충격신호별로 식별하는 단계와,상기 충격신호별 충격시점의 차이에 기초하여 상기 시간차를 산출하는 단계를 포함하는금속 파편 위치 추정 방법. |
| 8 | 제1항에 있어서, 상기 신경망 모델은 학습용 전파속도별 학습용 시간차로 정의되는 훈련 데이터셋에 의해 미리 지도 학습(supervised learning)된금속 파편 위치 추정 방법. |
| 9 | 제8항에 있어서, 상기 신경망 모델은 상기 학습용 시간차를 입력받아 예측 전파속도를 출력하되, 상기 학습용 전파속도와 상기 예측 전파속도의 차이가 최소가 되도록 지도 학습되는금속 파편 위치 추정 방법. |
| 10 | 제1항에 있어서, 상기 복수의 센서는 제1 내지 제3 센서를 포함하고,상기 신경망 모델은 하기 [수학식]에 의해 정의되는 손실함수에 따라 지도 학습되는 [수학식] (여기서, L은 상기 손실함수, (x, y)는 학습용 충격위치, (x1, y1)은 상기 제1 센서의 위치, (x2, y2)는 상기 제2 센서의 위치, (x3, y3)는 상기 제3 센서의 위치, v는 상기 전파속도, 는 상기 제1 및 제2 센서에서 충격신호가 측정된 시간차, 는 상기 제2 및 제3 센서에서 충격신호가 측정된 시간차)금속 파편 위치 추정 방법. |
| 11 | 제1항에 있어서, 상기 복수의 센서는 제1 내지 제3 센서를 포함하고,상기 충격위치를 추정하는 단계는, 상기 시간차와 상기 전파속도를 상기 제1 내지 제3 센서의 위치를 기준으로 하는 삼각법(Triangulation)에 대입하여 상기 충격위치를 결정하는 단계를 포함하는금속 파편 위치 추정 방법. |