| 번호 | 청구항 |
|---|---|
| 1 | 벡터 제어에 의해 일정한 속도로 운전되는 영구자석형 동기전동기의 d축 전류를 이용한 약자속 제어에 의한 상기 영구자석형 동기전동기의 속도의 변동 성분을 인공 신경망을 이용하여 추출하는 단계;추출된 속도의 변동 성분으로부터 옵셋(offset) 위치 오차와, 정현적인(sinusoidal) 위치 및 속도 오차를 추정하는 단계; 및상기 옵셋 위치 오차와, 정현적인 위치 및 속도 오차를 이용하여 보상된 위치 및 속도값을 출력하는 단계를 포함하는,인공 신경망을 이용한 엔코더 오차 추정 및 보상 방법. |
| 2 | 제 1 항에 있어서,상기 인공 신경망은 ADALINE(Adaptive Linear Neuron)을 포함하고,상기 약자속 제어에 의한 상기 영구자석형 동기전동기의 속도의 변동 성분을 인공 신경망을 이용하여 추출하는 단계는,속도의 기저 성분인 dc, -cos 및 sin 성분을 입력받고, 다음의 출력 을 생성하되, 및 를 피드백 입력받고, 인공 신경망을 이용하여 속도의 기저 성분인 dc값, -cos 및 sin 성분을 추정하고, 가중치를 갱신하는 단계를 포함하되,, , 는 각각의 기저 성분의 크기를 추출하기 위한 가중치이고, 는 엔코더 측정 위치에 추정된 엔코더 옵셋 오차 및 정현적인 위치 오차를 더하여 보상된 위치이고, 는 엔코더 측정 속도에 정현적인 속도 오차 를 보상한 속도인,인공 신경망을 이용한 엔코더 오차 추정 및 보상 방법. |
| 3 | 제 1항에 있어서, 추출된 속도의 변동 성분으로부터 옵셋 위치 오차와, 정현적인 위치 및 속도 오차를 추정하는 단계는, 옵셋 위치 오차 의 전달함수를 다음의 식과 같이 1차 LPF로 구성하는 것을 포함하되,는 추정기의 대역폭인,인공 신경망을 이용한 엔코더 오차 추정 및 보상 방법. |
| 4 | 제 3항에 있어서,추출된 속도의 변동 성분으로부터 옵셋 위치 오차와, 정현적인 위치 및 속도 오차를 추정하는 단계는,상기 옵셋 위치 오차를 위한 추정기 Gdc(s)가 다음 식과 같이 PI제어기로 구성되고, 비례 및 적분 게인은 다음과 같이 구성되되,, 는 토크 상수, 는 주입된 d축 전류, PP는 영구자석의 극 짝 수, J는 관성 모멘트, B는 마찰 계수인,인공 신경망을 이용한 엔코더 오차 추정 및 보상 방법. |
| 5 | 제 1항에 있어서,상기 추출된 속도의 변동 정보로부터 정현적인 위치 및 속도 오차를 추정하는 단계는, 다음과 같은 전달함수를 1차 LPF가 되도록 구성하되,여기서 및 는 편심의 정도 를 sin 성분과 cos 성분으로 분리한 것이며, 및 는 추정된 값이고, 다음과 같이 선정된 적분기 게인을 갖는 추정기로 구성되는,인공 신경망을 이용한 엔코더 오차 추정 및 보상 방법. |
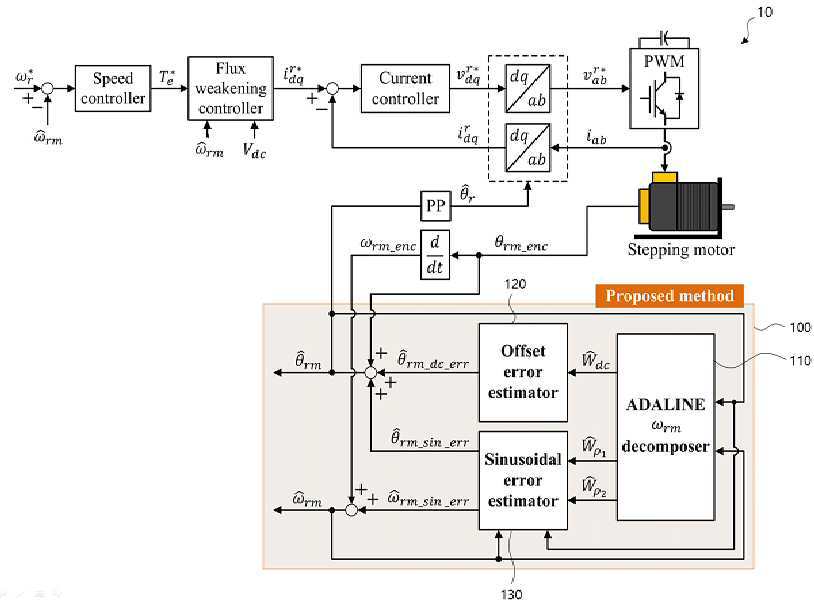
| 6 | 벡터 제어 중인 영구자석형 동기전동기에 대하여 d축 전류를 이용한 약자속 제어에 의해 발생하는 속도의 변동 성분을 인공 신경망을 통해 추출하는 속도 변동 성분 추출부;추출된 속도 변동 성분을 이용하여 DC 성분의 옵셋(offset) 위치 오차를 추정하는 제1 오차 추정부;상기 추출된 속도 변동 성분을 이용하여 AC 성분의 정현적인(sinusoidal) 위치 오차 및 속도 오차를 추정하는 제2 오차 추정부; 및상기 옵셋 위치 오차, 정현적인 위치 오차 및 속도 오차를 이용하여 보상된 위치 및 속도값을 출력하는 보상부를 포함하는,인공신경망을 이용한 엔코더 오차 추정 및 보상 시스템. |
| 7 | 제 6항에 있어서,상기 인공 신경망은 ADALINE(Adaptive Linear Neuron)을 포함하고,상기 속도 변동 성분 추출부는,속도의 기저 성분인 dc, -cos 및 sin 성분을 입력받고, 다음의 출력 을 생성하되,및 를 피드백 입력받고, 인공 신경망을 이용하여 속도의 기저 성분인 dc값, -cos 및 sin 성분을 추정하고, 가중치를 갱신하되,, , 는 각각의 기저 성분의 크기를 추출하기 위한 가중치이고, 는 엔코더 측정 위치에 추정된 엔코더 옵셋 오차 및 정현적인 위치 오차를 더하여 보상된 위치이고, 는 엔코더 측정 속도에 정현적인 속도 오차 를 보상한 속도인,인공신경망을 이용한 엔코더 오차 추정 및 보상 시스템. |
| 8 | 제 6항에 있어서,상기 제1 오차 추정부는,추출된 속도의 변동 성분으로부터 옵셋(offset) 위치 오차와, 정현적인(sinusoidal) 위치 및 속도 오차를 추정하는 단계는, 옵셋 위치 오차 의 전달함수를 다음의 식과 같이 1차 LPF로 구성하되,는 추정기의 대역폭인,인공신경망을 이용한 엔코더 오차 추정 및 보상 시스템. |
| 9 | 제 8항에 있어서,상기 제1 오차 추정부는,추정기 Gdc(s)를 다음 식과 같이 PI제어기로 구성하고, 비례 및 적분 게인은 다음과 같이 구성되되,, 는 토크 상수, 는 주입된 d축 전류, PP는 영구자석의 극 짝 수, J는 관성 모멘트, B는 마찰 계수인, |
| 10 | 제 6항에 있어서,상기 제2 오차 추정부는, 다음과 같은 전달함수를 1차 LPF가 되도록 구성하되,여기서 및 는 편심의 정도 를 sin 성분과 cos 성분으로 분리한 것이며, 및 는 추정된 값이고, 상기 전달함수와 같이 1차 LPF가 되도록 구성하되,상기 제2 오차 추정부는, 상기 및 를 위한 추정기 및 추정기의 적분기 게인을 다음과 같이 구성하는,인공신경망을 이용한 엔코더 오차 추정 및 보상 시스템. |