| 번호 | 청구항 |
|---|---|
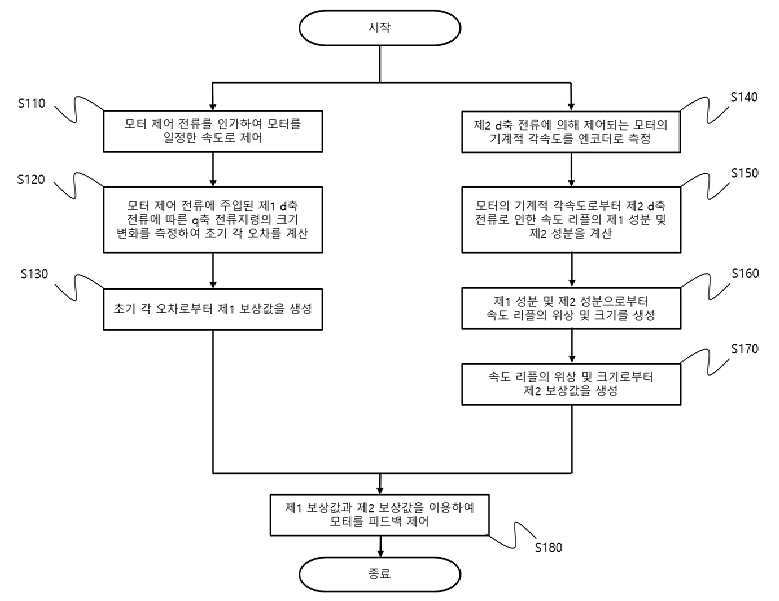
| 1 | 제어부가 모터 제어 전류를 인가하여 영구자석형 동기전동기를 일정한 속도로 속도 제어하는 단계;오차 계산부가 상기 모터 제어 전류에 주입된 제1 d축 전류에 따른 q축 전류지령의 크기 변화를 측정하여 초기 각 오차를 계산하는 단계;보상부가 상기 초기 각 오차로부터 제1 보상값을 생성하는 단계; 제2 d축 전류에 의해 제어되는 상기 영구자석형 동기전동기의 기계적 각속도를 엔코더로 측정하는 단계;상기 오차 계산부가 엔코더로 측정된 기계적 각속도로부터 상기 제2 d축 전류로 인한 속도 리플의 제1 성분 및 제2 성분을 계산하는 단계;상기 오차 계산부가 상기 제1 성분 및 제2 성분으로부터 상기 속도 리플의 위상 및 크기를 계산하는 단계; 및상기 보상부가 상기 속도 리플의 위상 및 크기로부터 제2 보상값을 생성하는 단계를 포함하는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 방법. |
| 2 | 제1 항에 있어서, 상기 오차 계산부가 상기 모터 제어 전류에 주입된 제1 d축 전류에 따른 q축 전류의 크기 변화를 측정하여 초기 각 오차를 계산하는 단계는,실제 d, q축 전류 id_real, iq_real와 상기 제어부가 알고 있는 d, q축 전류 id_con, iq_con 사이의 관계식을 근사하여 아래의 식을 생성하고,모터 제어 전류에 주입된 제1 d축 전류에 대한 q축 전류지령의 크기 변화의 비율 를와 같이 계산하는 단계를 포함하는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 방법. |
| 3 | 제 1항에 있어서, 상기 제1 성분은 상기 엔코더로 측정된 기계적 각속도에 대역 통과 필터를 적용한 값이고,상기 제2 성분은 상기 제1 성분에 전역 통과 필터를 적용한 값인,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 방법. |
| 4 | 제 3항에 있어서,상기 엔코더에 의해 측정되는 기계적 각속도 ωrm_enc 는 로 계산되고, 여기서 id_0-는 0이 아닌 일정한 값을 갖는 상기 제2 d축 전류이고, ωrm 은 상기 영구자석형 동기전동기의 기계 각속도이고, J는 관성모멘트이고 α는 상기 속도 리플의 맥동하는 각 오차의 위상이고,상기 제1 성분 ωrm_BPF 및 제2 성분 ωrm_APF은 아래의 식으로 각각 계산되는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 방법. |
| 5 | 제 4항에 있어서,상기 제1 성분 및 제2 성분으로부터 상기 속도 리플의 위상 및 크기를 계산하는 단계는,상기 제1 성분과 제2 성분에 atan2 연산을 적용하여 상기 속도 리플의 맥동하는 각 오차의 위상을 추출하는 단계를 포함하는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 방법. |
| 6 | 제 5항에 있어서,상기 속도 리플의 위상 및 크기 는,로 계산되는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 방법. |
| 7 | 영구자석형 동기전동기;상기 영구자석형 동기전동기의 회전자의 기계적 각속도를 측정하는 엔코더;상기 영구자석형 동기전동기에 모터 제어 전류를 인가하는 모터 제어부로, 상기 모터 제어 전류는 제1 d축 전류와 제2 d축 전류를 포함하는 모터 제어부;상기 모터 제어 전류에 주입된 제1 d축 전류에 따른 q축 전류지령의 크기 변화를 측정하여 초기 각 오차를 계산하고, 상기 엔코더로 측정된 상기 영구자석형 동기전동기의 기계적 각속도로부터 상기 제2 d축 전류로 인한 속도 리플의 제1 성분 및 제2 성분을 계산하여 상기 속도 리플의 위상 및 크기를 계산하는 오차 계산부; 및상기 초기 각 오차로부터 제1 보상값을 생성하고, 상기 속도 리플의 위상 및 크기로부터 제2 보상값을 생성하는 보상부를 포함하는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 시스템. |
| 8 | 제 7항에 있어서,상기 오차 계산부는,실제 d, q축 전류 id_real, iq_real와 상기 제어부가 알고 있는 d, q축 전류 id_con, iq_con 사이의 관계식을 근사하여 아래의 식을 생성하고,모터 제어 전류에 주입된 제1 d축 전류에 대한 q축 전류지령의 크기 변화의 비율 를와 같이 계산하는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 시스템. |
| 9 | 제 7항에 있어서,상기 제1 성분은 상기 엔코더로 측정된 기계적 각속도에 대역 통과 필터를 적용한 값이고,상기 제2 성분은 상기 제1 성분에 전역 통과 필터를 적용한 값인,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 시스템. |
| 10 | 제 9항에 있어서,상기 오차 계산부는,상기 엔코더에 의해 측정되는 기계적 각속도 ωrm_enc 를 로 계산하고, 여기서 id_0-는 0이 아닌 일정한 값을 갖는 상기 제2 d축 전류이고, ωrm 은 상기 영구자석형 동기전동기의 기계 각속도이고, J는 관성모멘트이고 α는 상기 속도 리플의 맥동하는 각 오차의 위상이고,상기 제1 성분 ωrm_BPF 및 제2 성분 ωrm_APF은 아래의 식으로 각각 계산하는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 시스템. |
| 11 | 제 10항에 있어서,상기 오차 계산부는,상기 제1 성분과 제2 성분에 atan2 연산을 적용하여 상기 속도 리플의 맥동하는 각 오차의 위상을 추출하는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 시스템. |
| 12 | 제 11항에 있어서,상기 오차 계산부는,상기 속도 리플의 위상 및 크기 를,로 계산하는,영구자석형 동기전동기의 벡터 제어 시 엔코더 오차 보상 시스템. |