| 번호 | 청구항 |
|---|---|
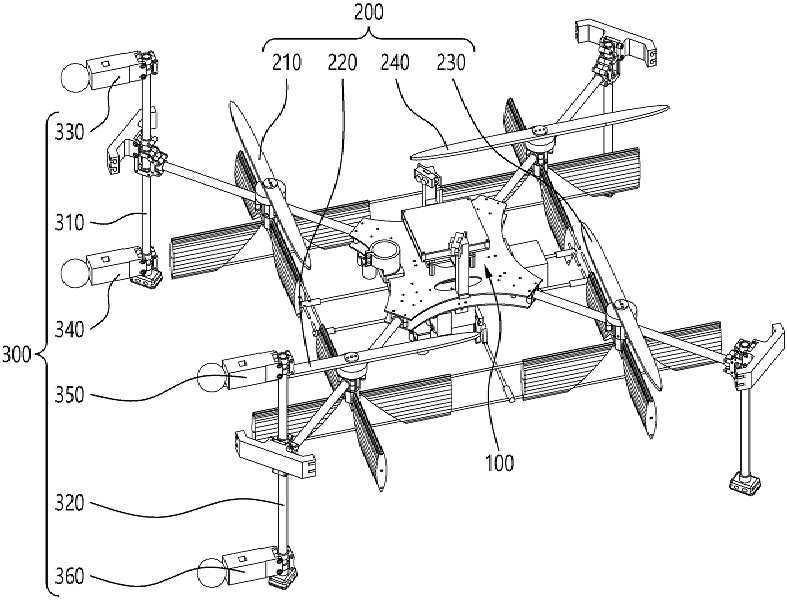
| 1 | 드론 본체; 상기 드론 본체가 공중에서 부유하기 위한 양력을 제공하여 상기 드론 본체를 원하는 곳으로 비행시키거나 원하는 곳에서 공중 정지시키는 양력 발생부; 상기 드론 본체가 벽면에 근접하여 이동이 가능하도록 상기 드론 본체에 연결되어 볼캐스팅부; 및 상기 드론 본체의 수평 이동이 가능하도록 상기 드론 본체에 연결된 플랩핑부를 포함하며,상기 볼캐스팅부는, 상기 양력 발생부의 제1 측에 연결된 제1 수직봉; 상기 양력 발생부의 제2 측에 연결된 제2 수직봉; 상기 제1 수직봉의 일측 종단에 연결된 제1 볼캐스터; 상기 제1 수직봉의 타측 종단에 연결된 제2 볼캐스터; 상기 제2 수직봉의 일측 종단에 연결된 제3 볼캐스터; 및 상기 제2 수직봉의 타측 종단에 연결된 제4 볼캐스터를 포함하는 것을 특징으로 하는 교각 시설 관리 드론. |
| 2 | 삭제 |
| 3 | 제1항에 있어서, 상기 양력 발생부는, 상기 드론 본체의 제1 측에 배치된 제1 로터부, 상기 드론 본체의 제2 측에 배치된 제2 로터부, 상기 드론 본체의 제3 측에 배치된 제3 로터부 및 상기 드론 본체의 제4 측에 배치된 제4 로터부를 포함하고, 상기 플랩핑부는, 상기 제1 로터부의 하단에 배치되고, 상기 드론 본체를 전후 방향으로 이동시키는 제1 전후 플랩 및 상기 드론 본체를 좌우 방향으로 이동시키는 제1 좌우 플랩을 포함하는 제1 플랩핑 클러스터; 상기 제2 로터부의 하단에 배치되고, 상기 드론 본체를 전후 방향으로 이동시키는 제2 전후 플랩 및 상기 드론 본체를 좌우 방향으로 이동시키는 제2 좌우 플랩을 포함하는 제2 플랩핑 클러스터; 상기 제3 로터부의 하단에 배치되고, 상기 드론 본체를 전후 방향으로 이동시키는 제3 전후 플랩 및 상기 드론 본체를 좌우 방향으로 이동시키는 제3 좌우 플랩을 포함하는 제3 플랩핑 클러스터; 및 상기 제4 로터부의 하단에 배치되고, 상기 드론 본체를 전후 방향으로 이동시키는 제4 전후 플랩 및 상기 드론 본체를 좌우 방향으로 이동시키는 제4 좌우 플랩을 포함하는 제4 플랩핑 클러스터를 포함하는 것을 특징으로 하는 교각 시설 관리 드론. |
| 4 | 제3항에 있어서, 상기 플랩핑부는, 상기 제1 로터부와 제2 로터부를 연결하도록 배치된 제1 지지봉; 상기 제2 로터부와 제3 로터부를 연결하도록 배치된 제2 지지봉; 상기 제3 로터부와 제4 로터부를 연결하도록 배치된 제3 지지봉; 상기 제4 로터부와 제1 로터부를 연결하도록 배치된 제4 지지봉; 상기 제2 지지봉과 평행하게 배치된 제1 제어봉; 상기 제2 지지봉과 평행하게 배치된 제2 제어봉; 상기 제1 지지봉과 평행하게 배치된 제3 제어봉; 상기 제1 지지봉 하단 일측에 배치되어, 상기 제1 제어봉의 일단에 연결되어 상기 제1 제어봉의 이동에 따라 상기 제1 전후 플랩을 상기 제1 지지봉을 기준으로 회동시키는 제1 회동봉; 상기 제1 지지봉 하단 타측에 배치되어, 상기 제2 제어봉의 일단에 연결되어 상기 제2 제어봉의 이동에 상기 제2 전후 플랩을 상기 제1 지지봉을 기준으로 회동시키는 제2 회동봉; 상기 제2 지지봉 하단에 배치되어, 상기 제3 제어봉의 일단에 연결되어 상기 제3 제어봉의 이동에 따라 상기 제2 좌우 플랩 및 상기 제3 좌우 플랩을 상기 제2 지지봉을 기준으로 회동시키는 제3 회동봉; 상기 제3 지지봉 하단 일측에 배치되어, 상기 제2 회동봉의 타단에 연결되어 상기 제2 회동봉의 이동에 따라 상기 제3 전후 플랩을 상기 제3 지지봉을 기준으로 회동시키는 제4 회동봉; 상기 제3 지지봉 하단 타측에 배치되어, 상기 제1 제어봉의 타단에 연결되어 상기 제1 제어봉의 이동에 따라 상기 제4 전후 플랩을 상기 제3 지지봉을 기준으로 회동시키는 제5 회동봉; 상기 제4 지지봉 하단에 배치되어, 상기 제3 제어봉의 타단에 연결되어 상기 제3 제어봉의 이동에 따라 상기 제1 좌우 플랩 및 상기 제4 좌우 플랩을 상기 제4 지지봉을 기준으로 회동시키는 제6 회동봉을 더 포함하는 것을 특징으로 하는 교각 시설 관리 드론. |
| 5 | 제4항에 있어서, 상기 제1 제어봉을 전후 방향으로 이동시키는 제1 서보 모터부; 상기 제2 제어봉을 전후 방향으로 이동시키는 제2 서보 모터부; 및 상기 제3 제어봉을 좌우 방향으로 이동시키는 제3 서보 모터부를 더 포함하는 것을 특징으로 하는 교각 시설 관리 드론. |