| 번호 | 청구항 |
|---|---|
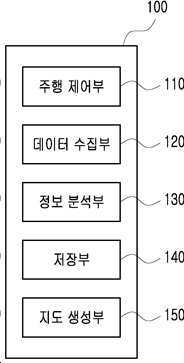
| 1 | 매설물 탐지를 위해 자율 주행 모드 또는 추적 주행 모드로 주행하는 자율 주행 모빌리티에 있어서,상기 자율 주행 모드로 지정 범위를 주행하는 도중 자기장 센서에 의해 자기장 신호가 감지되면, 상기 추적 주행 모드로 전환시켜 상기 자기장 신호가 감지되는 위치를 따라 주행하도록 제어하는 주행 제어부;상기 추적 주행 모드로 주행하면서 수신되는 자기장 신호의 수신 위치 데이터, 세기 데이터 및 신호 송수신 시 소요되는 시간 데이터를 수집하는 데이터 수집부;상기 수집한 데이터를 이용하여 매설물의 위치, 종류 및 깊이를 포함하는 매설물 정보를 분석하는 정보 분석부; 및상기 추적 주행 모드로 주행한 주행 경로를 저장하고, 저장된 주행 경로에 상기 매설물 정보가 반영된 매설물 지도를 생성하는 지도 생성부를 포함하는 자율 주행 모빌리티. |
| 2 | 제1항에 있어서,상기 주행 제어부는,상기 추적 주행 모드로 주행 시 미리 마련된 라인 트레이싱(Line Tracing) 알고리즘을 실행하여 상기 자기장 신호를 송신하는 매설물의 파이프 라인을 따라 주행하도록 제어하는 자율 주행 모빌리티. |
| 3 | 제1항에 있어서,상기 정보 분석부는,상기 모빌리티에 구비되는 GNSS 센서와 상기 자기장 신호의 수신 위치 데이터를 분석하여 매설물의 위치를 판단하고, 상기 세기 데이터의 특징을 추출하고 추출된 특징을 미리 마련된 패턴 인식 모델에 입력하여 매설물의 종류를 판단하며,상기 시간 데이터를 분석하여 신호 송수신 시 소요되는 시간을 계산하여 매설물의 매설 깊이를 판단하고,상기 패턴 인식 모델은,매설물의 종류를 판단하기 위해 매설물 종류별로 수신되는 세기 데이터로부터 추출된 특징 값 데이터를 학습데이터로 학습을 수행하여 마련되는 딥러닝 기반 모델인 자율 주행 모빌리티. |
| 4 | 제3항에 있어서,상기 지도 생성부는,상기 판단된 매설물의 위치, 매설물의 종류 및 매설물의 매설 깊이를 상기 주행 경로에 반영하여 상기 매설물 지도를 생성하고 저장하는 자율 주행 모빌리티. |
| 5 | 제1항에 있어서, 상기 모빌리티는,지하 매설물에 의한 자기장 신호를 감지하는 상기 자기장 센서가 전면부 양측에 각각 구비되고, 상기 자기장 신호가 감지된 위치를 파악하기 위한 GNSS(Global Navigation Satellite System) 센서와, 상기 주행 제어부의 제어에 따라 자율 주행 모드 또는 추적 주행 모드로 자율 주행하기 위한 카메라 센서, 라이다 센서 및 초음파 센서가 각각 구비되는 자율 주행 모빌리티. |
| 6 | 매설물 탐지를 위한 자율 주행 모빌리티를 이용한 매설물 탐지 방법에 있어서,상기 모빌리티가 자기장 센서에 의해 자기장 신호가 감지될 때까지 자율 주행 모드로 지정 범위를 주행하는 단계;상기 주행 도중 자기장 신호가 감지되면 추적 주행 모드로 전환하여 상기 자기장 신호가 감지되는 위치를 따라 주행하는 단계;상기 추적 주행 모드로 주행하면서 수신되는 자기장 신호의 수신 위치 데이터, 세기 데이터 및 신호 송수신 시 소요되는 시간 데이터를 수집하는 단계;상기 수집한 데이터를 이용하여 매설물의 위치, 종류 및 깊이를 포함하는 매설물 정보를 분석하는 단계; 및상기 추적 주행 모드로 주행한 주행 경로를 저장하고, 저장된 주행 경로에 상기 매설물 정보가 반영된 매설물 지도를 생성하는 단계를 포함하는 매설물 탐지 방법. |
| 7 | 제6항에 있어서,상기 자기장 신호가 감지되는 위치를 따라 주행하는 단계는,미리 마련된 라인 트레이싱(Line Tracing) 알고리즘을 실행하여 상기 자기장 신호를 송신하는 매설물의 파이프 라인을 따라 주행하는 매설물 탐지 방법. |
| 8 | 제6항에 있어서,상기 매설물 정보를 분석하는 단계는,상기 모빌리티에 구비되는 GNSS 센서와 상기 자기장 신호의 수신 위치 데이터를 분석하여 매설물의 위치를 판단하고, 상기 세기 데이터의 특징을 추출하고 추출된 특징을 미리 마련된 패턴 인식 모델에 입력하여 매설물의 종류를 판단하며, 상기 시간 데이터를 분석하여 신호 송수신 시 소요되는 시간을 계산하여 매설물의 매설 깊이를 판단하고,상기 패턴 인식 모델은,매설물의 종류를 판단하기 위해 매설물 종류별로 수신되는 세기 데이터로부터 추출된 특징 값 데이터를 학습데이터로 학습을 수행하여 마련되는 딥러닝 기반 모델인 매설물 탐지 방법. |
| 9 | 제8항에 있어서,상기 매설물 지도를 생성하는 단계는,상기 판단된 매설물의 위치, 매설물의 종류 및 매설물의 매설 깊이를 상기 주행 경로에 반영하여 상기 매설물 지도를 생성하고 저장하는 매설물 탐지 방법. |
| 10 | 제6항에 있어서,상기 모빌리티는,지하 매설물에 의한 자기장 신호를 감지하는 상기 자기장 센서가 전면부 양측에 각각 구비되고, 상기 자기장 신호가 감지된 위치를 파악하기 위한 GNSS(Global Navigation Satellite System) 센서와, 상기 주행 제어부의 제어에 따라 자율 주행 모드 또는 추적 주행 모드로 자율 주행하기 위한 카메라 센서, 라이다 센서 및 초음파 센서가 각각 구비되는 매설물 탐지 방법. |