| 번호 | 청구항 |
|---|---|
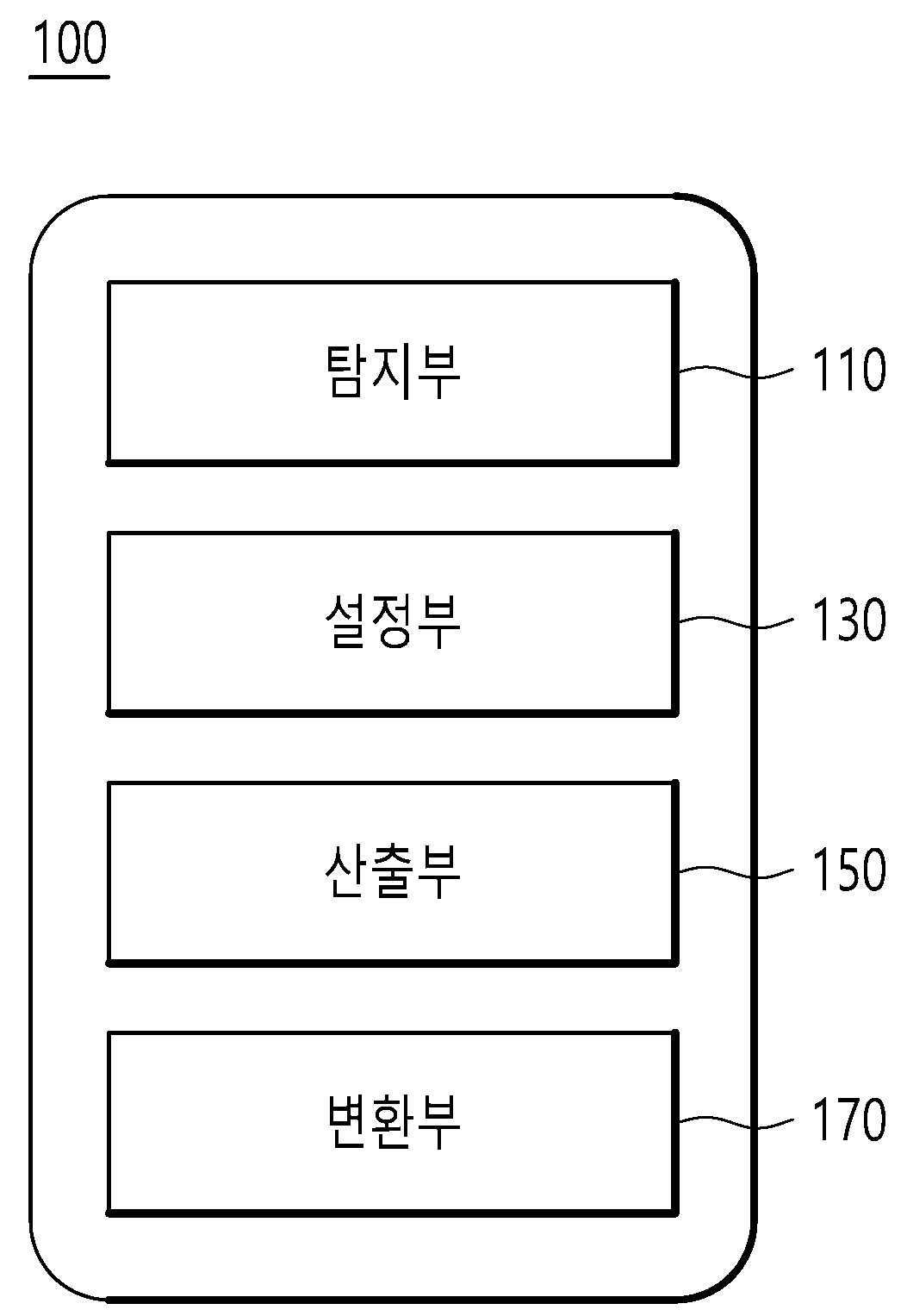
| 1 | 학습된(Pre-training)인공지능 딥러닝 모델을 통해, 무인항공기에 설정된 임무에 대응하는 목표물을 탐지(detect)하고, 탐지된 목표물을 포함하는 바운딩 박스(Bounding box)를 생성하는 탐지부;카메라 이미지 평면(image plane)상에 픽셀로 나타낸 목표점인 기준 픽셀을 설정하는 설정부;2차원 픽셀 좌표계에서 상기 목표물의 기준 픽셀 좌표를 산출하는 산출부;무인항공기의 고도정보, 목표물의 깊이(depth) 정보 중 적어도 하나를 이용하여, 상기 목표물의 기준 픽셀 좌표를 3차원 좌표로 변환하고, 변환된 3차원 좌표의 좌표계를 변환하여 목표물의 GPS 좌표를 획득하는 변환부; 를 포함하는 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 장치. |
| 2 | 제1항에 있어서, 상기 목표물은지상 목표물과 상공 목표물을 포함하고, 상기 변환부; 는 무인항공기의 고도정보를 상기 지상 목표물의 깊이 정보로 이용하여, 상기 목표물의 기준 픽셀 좌표를 3차원 좌표로 변환하는 것을 특징으로 하는 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 장치. |
| 3 | 제1항에 있어서, 상기 변환부; 는 깊이를 측정하는 스테레오 카메라나 깊이 카메라를 통해 상기 상공 목표물의 깊이 정보를 획득하여, 상기 목표물의 기준 픽셀 좌표를 3차원 좌표로 변환하는 것을 특징으로 하는 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 장치. |
| 4 | 제2항 또는 3항에 있어서, 상기 변환부; 는 무인항공기의 카메라 모델을 통해, 2차원 좌표인 목표물의 기준 픽셀 좌표에 대한 카메라 좌표계의 3차원 위치를 계산하고, 카메라와 무인항공기 CG(Center of Gravity) 간 외부 파라미터 값을 이용하여, 목표물의 기준 픽셀 좌표를 무인항공기의 몸체 좌표계에 대한 3차원 좌표로 변환하는 것을 특징으로 하는 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 장치. |
| 5 | 제4항에 있어서, 상기 변환부; 는무인항공기의 현재 GPS 좌표를 이용해서 무인항공기 몸체 좌표계로 나타낸 목표물의 3차원 좌표를, ECEF(Earth-Centered Earth-Fixed)좌표계로 변환한 후, 다시 LLA(Latitude-Longitude-Altitude)좌표계로 변환하여, 목표물의 GPS 좌표를 획득하는 것을 특징으로 하는 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 장치. |
| 6 | (A) 탐지부에서 학습된(Pre-training) 인공지능 딥러닝 모델을 통해, 무인항공기에 설정된 임무에 대응하는 목표물을 탐지(detect)하고, 탐지된 목표물을 포함하는 바운딩 박스(Bounding box)를 목표물의 크기에 따라 생성하는 단계;(B) 설정부에서 카메라 이미지 평면(image plane)상에 픽셀로 나타낸 목표점인 기준 픽셀을 설정하는 단계;(C) 산출부에서 2차원 픽셀 좌표계에서 상기 목표물의 기준 픽셀 좌표를 산출하는 단계;(D) 변환부에서 무인항공기의 고도정보, 목표물의 깊이(depth) 정보 중 적어도 하나를 이용하여, 상기 목표물의 기준 픽셀 좌표를 3차원 좌표로 변환하고, 변환된 3차원 좌표의 좌표계를 변환하여 목표물의 GPS 좌표를 획득하는 단계; 를 포함하는, 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 방법. |
| 7 | 제6항에 있어서, 상기 목표물은지상 목표물과 상공 목표물을 포함하고,상기 (D)의 단계; 는 무인항공기의 고도정보를 상기 지상 목표물의 깊이 정보로 이용하여, 상기 목표물의 기준 픽셀 좌표를 3차원 좌표로 변환하는 것을 특징으로 하는, 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 방법. |
| 8 | 제6항에 있어서, 상기 (D)의 단계; 는 깊이를 측정하는 스테레오 카메라나 깊이 카메라를 통해 상기 상공 목표물의 깊이 정보를 획득하여, 상기 목표물의 기준 픽셀 좌표를 3차원 좌표로 변환하는 것을 특징으로 하는, 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 방법. |
| 9 | 제7항 또는 8항에 있어서, 상기 (D)의 단계; 는 무인항공기의 카메라 모델을 통해, 2차원 좌표인 목표물의 기준 픽셀 좌표에 대한 카메라 좌표계의 3차원 위치를 계산하고, 카메라와 무인항공기 CG(Center of Gravity) 간 외부 파라미터 값을 이용하여, 목표물의 기준 픽셀 좌표를 무인항공기의 몸체 좌표계에 대한 3차원 좌표로 변환하는 것을 특징으로 하는, 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 방법. |
| 10 | 제9항에 있어서, 상기 (D)의 단계; 는무인항공기의 현재 GPS 좌표를 이용해서 무인항공기 몸체 좌표계로 나타낸 목표물의 3차원 좌표를, ECEF(Earth-Centered Earth-Fixed)좌표계로 변환한 후, 다시 LLA(Latitude-Longitude-Altitude)좌표계로 변환하여, 목표물의 GPS 좌표를 획득하는 것을 특징으로 하는, 무인항공기의 카메라 영상 정보를 기반으로 목표물의 GPS 좌표를 추정하는 방법. |