| 번호 | 청구항 |
|---|---|
| 1 | 드론에 탑재된 카메라를 이용하여 촬영된 지상 목표물의 중심 픽셀이 이미지 평면(image plane) 상에서 위치하는지의 여부를 체크하는 단계; 상기 지상 목표물의 상기 중심 픽셀이 상기 이미지 평면상에 위치하는 것으로 체크되면, 요잉 회전을 위해 요잉 각도를 계산하는 단계; 계산된 요잉 각도만큼 요잉 회전을 통해 수평 방향으로 정렬하는 단계; 상기 드론의 이동을 위해 거리를 계산하는 단계; 및 계산된 거리만큼 전진 또는 후진 이동하여 수직 방향으로 정렬하는 단계를 포함하고,상기 거리는, (여기서, , , 는 상기 드론의 고도 기준점 와 카메라 광학축이 지면과 만나는 점 사이의 거리, 는 지면으로부터 떨어진 카메라 원점의 높이, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 드론 몸체 좌표계로 변환한 x 좌표값, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 상기 드론 몸체 좌표계로 변환한 y 좌표값, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 드론 몸체 좌표계로 변환한 z 좌표값, 는 상기 드론 몸체 좌표계의 축을 기준으로 지면 방향으로 틸트 각도)에 의해 계산되는 것을 특징으로 하는 카메라가 탑재된 드론을 이용한 지상 표적 추적 방법. |
| 2 | 제1항에 있어서, 상기 요잉 각도는, (여기서, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 드론 몸체 좌표계로 변환한 x 좌표값, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 상기 드론 몸체 좌표계로 변환한 y 좌표값)에 의해 계산되는 것을 특징으로 하는 카메라가 탑재된 드론을 이용한 지상 표적 추적 방법. |
| 3 | 삭제 |
| 4 | 제1항에 있어서, 상기 수평 방향으로 정렬하는 단계는, 상기 지상 목표물로 선택된 픽셀이 상기 이미지 평면의 중심에 위치하도록 하기 위해, 제자리에서 요잉(yawing)을 통해 상기 드론의 헤딩 각을 회전하여 선택된 픽셀이 상기 이미지 평면의 수평 방향 중심에 위치하도록 맞추는 것을 특징으로 하는 카메라가 탑재된 드론을 이용한 지상 표적 추적 방법. |
| 5 | 제1항에 있어서, 상기 수직 방향으로 정렬하는 단계는, 상기 드론을 전진 또는 후진 이동하여 선택된 픽셀이 상기 이미지 평면의 중심에 위치하도록 수직 방향을 맞추는 것을 특징으로 하는 카메라가 탑재된 드론을 이용한 지상 표적 추적 방법. |
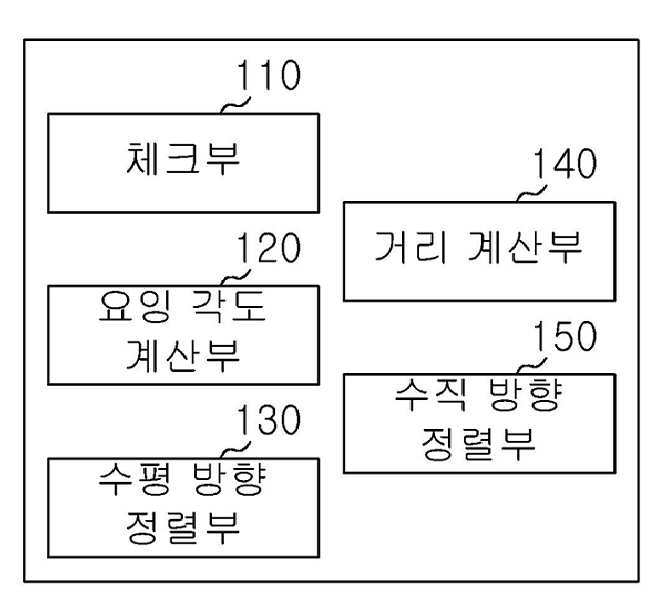
| 6 | 드론에 탑재된 카메라를 이용하여 촬영된 지상 목표물의 중심 픽셀이 이미지 평면(image plane) 상에서 위치하는지의 여부를 체크하는 체크부; 상기 지상 목표물의 상기 중심 픽셀이 상기 이미지 평면상에 위치하는 것으로 체크되면, 요잉 회전을 위해 요잉 각도를 계산하는 요잉 각도 계산부; 계산된 요잉 각도만큼 요잉 회전을 통해 수평 방향으로 정렬하는 수평 방향 정렬부; 상기 드론의 이동을 위해 거리를 계산하는 거리 계산부; 및 계산된 거리만큼 전진 또는 후진 이동하여 수직 방향으로 정렬하는 수직 방향 정렬부를 포함하고,상기 거리 계산부는, (여기서, , , 는 상기 드론의 고도 기준점 와 카메라 광학축이 지면과 만나는 점 사이의 거리, 는 지면으로부터 떨어진 카메라 원점의 높이, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 드론 몸체 좌표계로 변환한 x 좌표값, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 상기 드론 몸체 좌표계로 변환한 y 좌표값, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 상기 드론 몸체 좌표계로 변환한 z 좌표값, 는 상기 드론 몸체 좌표계의 축을 기준으로 지면 방향으로 틸트 각도)의 수식을 이용하여 상기 거리를 계산하는 것을 특징으로 하는 카메라가 탑재된 드론을 이용한 지상 표적 추적 장치. |
| 7 | 제6항에 있어서, 상기 요잉 각도 계산부는, (여기서, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 드론 몸체 좌표계로 변환한 x 좌표값, 는 상기 이미지 평면 상에 위치하는 픽셀 좌표를 상기 드론 몸체 좌표계로 변환한 y 좌표값)의 수식을 이용하여 상기 요잉 각도를 계산하는 것을 특징으로 하는 카메라가 탑재된 드론을 이용한 지상 표적 추적 장치. |
| 8 | 삭제 |