| 번호 | 청구항 |
|---|---|
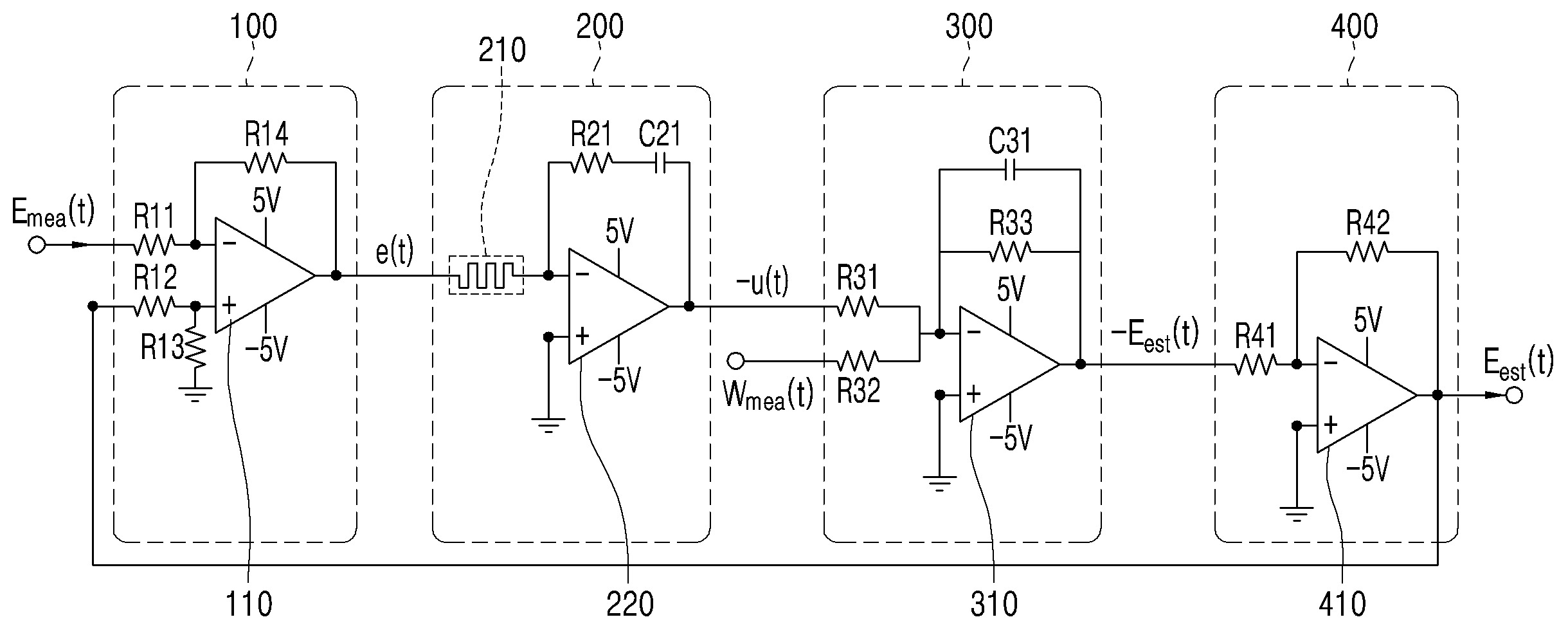
| 1 | 제 1 센서로부터의 제 1 데이터와 센서 퓨전 장치의 출력을 입력받아 이들의 오차를 계산하는 차분기;상기 차분기로부터의 오차로부터 출력값을 계산하는 PI 제어기;상기 PI 제어기의 출력값과 제 2 센서로부터의 제 2 데이터를 입력받아 이들을 적분하는 적분기; 및상기 적분기의 출력을 반전시키는 인버터를 포함하는 센서 퓨전 장치. |
| 2 | 청구항 1에 있어서, 상기 제 1 센서는 가속도계를 포함하여 상기 제 1 데이터는 오일러 각도(Emea(t))를 포함하고, 상기 제 2 센서는 각속도계를 포함하여 상기 제 2 데이터는 각속도(Wmea(t))를 포함하며, 상기 센서 퓨전 장치의 출력은 오일러 각도 예측값(Eest(t))을 포함하는 센서 퓨전 장치. |
| 3 | 청구항 2에 있어서, 상기 차분기는 오일러 각도 예측값(Eest(t))과 오일러 각도(Emea(t))의 오차값()을 계산하는 센서 퓨전 장치. |
| 4 | 청구항 2에 있어서, 상기 PI 제어기는,제 1 및 제 2 입력 단자와 출력 단자를 구비하는 차동 증폭기와,상기 차분기의 출력 단자와 상기 차동 증폭기의 상기 제 1 입력 단자 사이에 마련되는 멤리스터와,상기 차동 증폭기의 출력 단자와 상기 제 1 단자 사이에 직렬 연결된 저항 및 캐패시터를 포함하는 센서 퓨전 장치. |
| 5 | 청구항 4에 있어서, 상기 PI 제어기는 상기 차분기로부터 오차값(e(t))을 입력받아 의 출력값(-u(t))을 계산하며, GPI는 멤리스터의 전도도값, RPI는 저항의 저항값, CPI는 캐패시터의 캐패시턴스인 센서 퓨전 장치. |
| 6 | 청구항 5에 있어서, 상기 PI 제어기의 출력값(-u(t))은 상기 차분기로부터의 오차값(e(t))에 비례하는 센서 퓨전 장치. |
| 7 | 청구항 6에 있어서, 상기 PI 제어기는 칼만계수(K)를 상기 멤리스터의 전도도에 대응시켜 상기 멤리스터의 전도도를 제어하여 게인값을 제어하는 센서 퓨전 장치. |
| 8 | 청구항 7에 있어서, 상기 PI 제어기의 게인값은 상기 멤리스터는 전도도가 증가하면 증가하는 센서 퓨전 장치. |
| 9 | 청구항 8에 있어서, 상기 멤리스터는 게이트, 소스 및 드레인을 포함하고, 게이트와 소스 및 드레인 사이에 채널층이 형성되며, 상기 채널층은 결정층과 결정층 사이에 그레인 바운더리가 존재하는 다결정 상태로 형성된 SnS2층을 포함하는 센서 퓨전 장치. |
| 10 | 청구항 2에 있어서, 상기 적분기는 상기 PI 제어기의 출력값과 상기 각속도계로부터의 각속도(Wmea(t))를 입력받아 적분하는 센서 퓨전 장치. |
| 11 | 청구항 2에 있어서, 상기 인버터는 상기 적분기의 출력을 입력받아 반전시켜 상기 오일러 각도 예측값(Eest(t))을 출력하고, 상기 오일러 각도 예측값(Eest(t))은 상기 차분기로 피드백되는 센서 퓨전 장치. |
| 12 | 둘 이상의 센서;상기 둘 이상의 센서로부터 데이터를 입력하여 융합하는 센서 퓨전 장치; 및적어도 일부가 상기 센서 융합 장치의 출력을 변환시키는 디지털 프로세서를 포함하는 멀티 센서 시스템. |
| 13 | 청구항 12에 있어서, 상기 둘 이상의 센서는 아날로그 데이터를 출력하고, 상기 센서 퓨전 장치는 상기 둘 이상의 센서로부터 아날로그 데이터를 융합하여 아날로그 신호를 출력하며, 상기 디지털 프로세서는 상기 센서 퓨전 장치의 아날로그 신호를 디지털 신호로 변환하는 멀티 센서 시스템. |
| 14 | 청구항 13에 있어서, 상기 센서 퓨전 장치는,제 1 센서로부터의 제 1 데이터와 센서 퓨전 장치의 출력을 입력받아 이들의 오차를 계산하는 차분기;상기 차분기로부터의 오차로부터 출력값을 계산하는 PI 제어기;상기 PI 제어기의 출력값과 제 2 센서로부터의 제 2 데이터를 입력받아 이들을 적분하는 적분기; 및상기 적분기의 출력을 반전시키는 인버터를 포함하는 멀티 센서 시스템. |
| 15 | 청구항 14에 있어서, 상기 제 1 센서는 가속도계를 포함하여 상기 제 1 데이터는 오일러 각도(Emea(t))를 포함하고, 상기 제 2 센서는 각속도계를 포함하여 상기 제 2 데이터는 각속도(Wmea(t))를 포함하며, 상기 센서 퓨전 장치의 출력은 오일러 각도 예측값(Eest(t))을 포함하는 멀티 센서 시스템. |
| 16 | 청구항 15에 있어서, 상기 차분기는 오일러 각도 예측값(Eest(t))과 오일러 각도(Emea(t))의 오차값()을 계산하는 멀티 센서 시스템. |
| 17 | 청구항 15에 있어서, 상기 PI 제어기는,제 1 및 제 2 입력 단자와 출력 단자를 구비하는 차동 증폭기와,상기 차분기의 출력 단자와 상기 차동 증폭기의 상기 제 1 입력 단자 사이에 마련되는 멤리스터와,상기 차동 증폭기의 출력 단자와 상기 제 1 단자 사이에 직렬 연결된 저항 및 캐패시터를 포함하는 멀티 센서 시스템. |
| 18 | 청구항 16에 있어서, 상기 PI 제어기는 상기 차분기로부터 오차값(e(t))을 입력받아 의 출력값(-u(t))을 계산하며, GPI는 멤리스터의 전도도값, RPI는 저항의 저항값, CPI는 캐패시터의 캐패시턴스인 멀티 센서 시스템. |
| 19 | 청구항 18에 있어서, 상기 PI 제어기는 칼만계수(K)를 상기 멤리스터의 전도도에 대응시켜 상기 멤리스터의 전도도를 제어하여 게인값을 제어하는 멀티 센서 시스템. |
| 20 | 청구항 15에 있어서, 상기 적분기는 상기 PI 제어기의 출력값과 상기 각속도계로부터의 각속도(Wmea(t))를 입력받아 적분하는 멀티 센서 시스템. |
| 21 | 청구항 15에 있어서, 상기 인버터는 상기 적분기의 출력을 입력받아 반전시켜 상기 오일러 각도 예측값(Eest(t))을 출력하고, 상기 오일러 각도 예측값(Eest(t))은 상기 차분기로 피드백되는 멀티 센서 시스템. |