| 번호 | 청구항 |
|---|---|
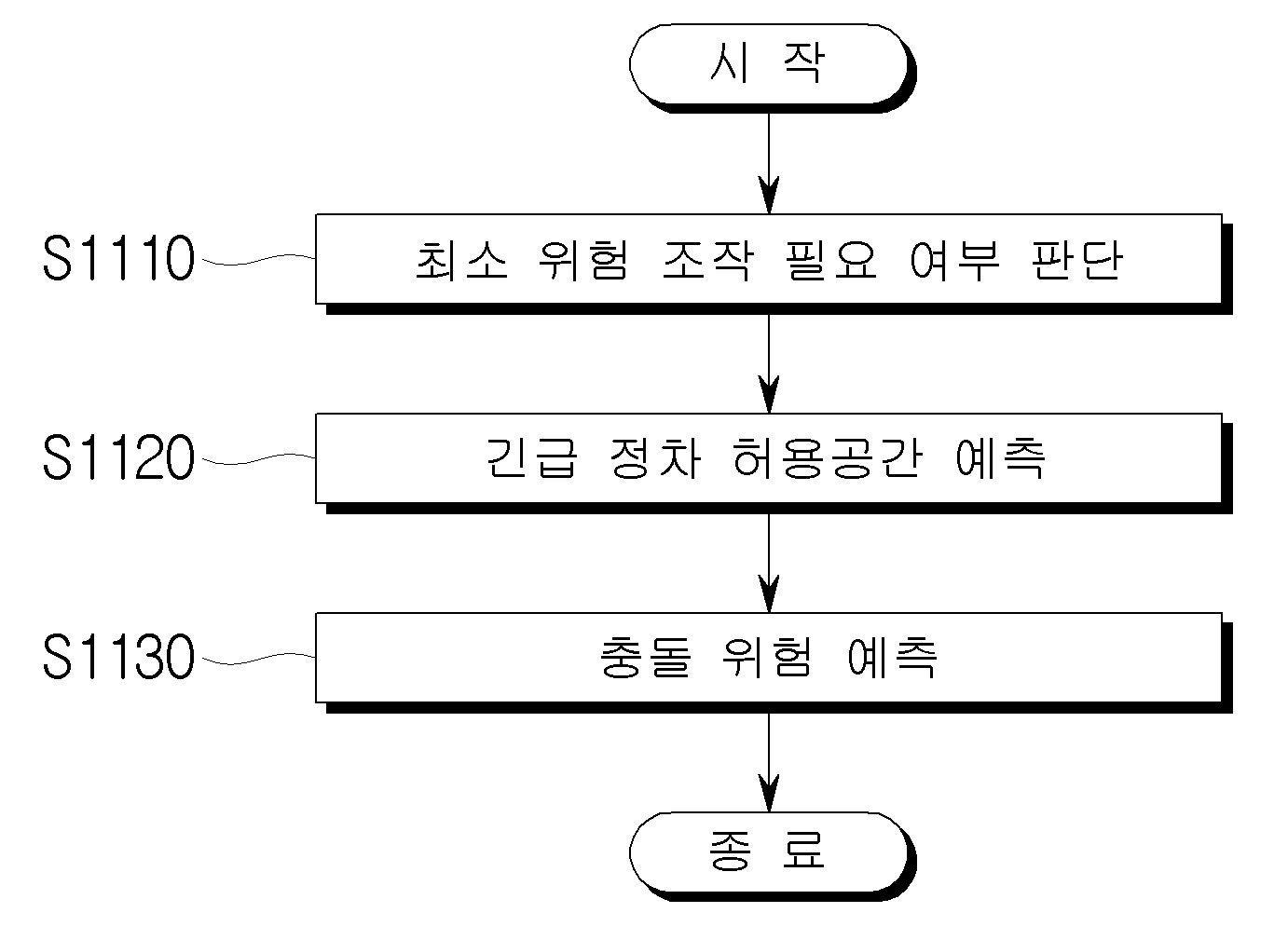
| 1 | 자율 발렛 주차 차량에 있어서, 상기 차량의 주변 환경을 감지하여 주변 환경 정보를 생성하는 적어도 하나의 센서;상기 차량의 상태를 모니터링하여 차량 상태 정보를 생성하고, 상기 차량의 자율 발렛 주차 중에 상기 주변 환경 정보 및 상기 차량 상태 정보 중 적어도 하나를 기반으로 최소 위험 조작이 필요한지 여부를 판단하는 프로세서; 및상기 프로세서의 제어에 따라 상기 차량의 작동을 제어하는 컨트롤러를 포함하고, 상기 프로세서는, 상기 최소 위험 조작이 필요한 것으로 판단되면, 상기 차량의 속도, 상기 차량이 정지하기까지 걸리는 시간, 고정 장애물 또는 동적 장애물이 존재하는 지 여부에 기초하여 상기 차량이 정차하기 위한 긴급 정차 허용공간을 산출하는, 차량. |
| 2 | 제1항에서,상기 프로세서는, 상기 차량의 속도 및 상기 차량이 정지하기까지 걸리는 시간을 바탕으로 상기 긴급 정차 허용공간의 종방향 길이를 산출하는, 차량. |
| 3 | 제2항에서, 상기 프로세서는, 상기 차량의 주행 경로 상에 상기 고정 장애물이 존재하는 지 여부를 판단하고, 상기 고정 장애물이 존재하는 경우 상기 차량과 가까운 상기 긴급 정차 허용공간의 일측에서 상기 고정 장애물까지의 거리를 산출하며, 상기 고정 장애물까지의 거리와 상기 긴급 정차 허용공간의 종방향 길이를 비교하여 더 작은 값을 상기 긴급 정차 허용공간의 최종 종방향 길이로 선택하는, 차량. |
| 4 | 제1항에서, 상기 프로세서는, 상기 차량의 폭과 미리 설정된 정차 여유 상수값을 바탕으로 상기 긴급 정차 허용공간의 횡방향 길이를 산출하는, 차량. |
| 5 | 제1항에서, 상기 프로세서는, 상기 차량의 폭과 미리 설정된 최대 차선 허용 범위값을 바탕으로 상기 긴급 정차 허용공간의 횡방향 길이를 산출하는, 차량. |
| 6 | 제3항에서, 상기 프로세서는, 상기 긴급 정차 허용공간 내 상기 동적 장애물이 존재하는 지 여부를 판단하여 충돌 위험을 예측하고, 충돌 위험이 예측되면 상기 긴급 정차 허용공간의 최종 종방향 길이를 보정하는, 차량. |
| 7 | 제3항에서, 상기 프로세서는, 상기 긴급 정차 허용공간 내 상기 동적 장애물이 존재하는 지 여부를 판단하고, 상기 긴급 정차 허용공간 내 상기 동적 장애물이 존재하는 경우, 상기 동적 장애물까지의 거리와 상기 긴급 정차 허용공간의 최종 종방향 길이를 비교하여 더 작은 값으로 상기 긴급 정차 허용공간의 최종 종방향 길이를 보정하는, 차량. |
| 8 | 제2항에서, 상기 차량의 속도가 0km/h를 초과하고 10km/h 이하인 경우, 상기 차량이 정지하기까지 걸리는 시간은 3초인, 차량. |
| 9 | 제2항에서, 상기 차량의 속도가 10km/h를 초과하고 20km/h 이하인 경우, 상기 차량이 정지하기까지 걸리는 시간은 4초인, 차량. |
| 10 | 제2항에서, 상기 차량의 속도가 20km/h를 초과하고 30km/h 이하인 경우, 상기 차량이 정지하기까지 걸리는 시간은 5초인, 차량. |
| 11 | 자율 발렛 주차 서버에 있어서, 차량과 통신하는 통신 장치; 및상기 차량으로부터 차량 상태 정보를 수신하고, 상기 차량의 자율 주행 중에 주변 환경 정보 및 상기 차량 상태 정보 중 적어도 하나를 기반으로 최소 위험 조작이 필요한지 여부를 판단하는 프로세서를 포함하고, 상기 프로세서는, 상기 최소 위험 조작이 필요한 것으로 판단되면, 상기 차량의 속도, 상기 차량이 정지하기까지 걸리는 시간, 고정 장애물 또는 동적 장애물이 존재하는 지 여부에 기초하여 상기 차량이 정차하기 위한 긴급 정차 허용공간을 산출하는, 서버. |
| 12 | 제11항에서, 상기 프로세서는, 상기 차량의 속도 및 상기 차량이 정지하기까지 걸리는 시간을 바탕으로 상기 긴급 정차 허용공간의 종방향 길이를 산출하는, 서버. |
| 13 | 제12항에서,상기 프로세서는, 상기 차량의 주행 경로 상에 상기 고정 장애물이 존재하는 지 여부를 판단하고, 상기 고정 장애물이 존재하는 경우 상기 차량과 가까운 상기 긴급 정차 허용공간의 일측에서 상기 고정 장애물까지의 거리를 산출하며, 상기 고정 장애물까지의 거리와 상기 긴급 정차 허용공간의 종방향 길이를 비교하여 더 작은 값을 상기 긴급 정차 허용공간의 최종 종방향 길이로 선택하는, 서버. |
| 14 | 제11항에서, 상기 프로세서는, 상기 차량의 폭과 미리 설정된 정차 여유 상수값을 바탕으로 상기 긴급 정차 허용공간의 횡방향 길이를 산출하는, 서버. |
| 15 | 제11항에서, 상기 프로세서는, 상기 차량의 폭과 미리 설정된 최대 차선 허용 범위값을 바탕으로 상기 긴급 정차 허용공간의 횡방향 길이를 산출하는, 서버. |
| 16 | 제13항에서, 상기 프로세서는, 상기 긴급 정차 허용공간 내 상기 동적 장애물이 존재하는 지 여부를 판단하고, 상기 긴급 정차 허용공간 내 상기 동적 장애물이 존재하는 경우, 상기 동적 장애물까지의 거리와 상기 긴급 정차 허용공간의 최종 종방향 길이를 비교하여 더 작은 값으로 상기 긴급 정차 허용공간의 최종 종방향 길이를 보정하는, 서버. |
| 17 | 제11항에서, 상기 프로세서는, 상기 긴급 정차 허용공간 내 타차량이 존재하는 지 여부를 판단하고, 상기 긴급 정차 허용공간 내 상기 타차량이 존재하는 경우, 상기 타차량을 이동시키는, 서버. |
| 18 | 제11항에서, 상기 프로세서는, 상기 긴급 정차 허용공간을 산출한 이후, 상기 긴급 정차 허용공간 내 타차량의 진입이 허용되지 않도록 상기 타차량의 이동을 제어하는, 서버. |
| 19 | 자율 주행 차량의 동작 방법에 있어서,상기 차량의 자율 주행 동안에 상기 차량의 주변 환경을 감지하여 주변 환경 정보를 획득하는 동작;상기 차량의 자율 주행 동안에 상기 차량의 상태를 모니터링하여 차량 상태 정보를 획득하는 동작; 상기 차량의 자율 주행 중에 상기 주변 환경 정보 및 상기 차량 상태 정보 중 적어도 하나를 기반으로 최소 위험 조작이 필요한지 여부를 판단하는 동작; 및상기 최소 위험 조작이 필요한 것으로 판단되면, 상기 차량의 속도, 상기 차량이 정지하기까지 걸리는 시간, 고정 장애물 또는 동적 장애물이 존재하는 지 여부에 기초하여 상기 차량이 정차하기 위한 긴급 정차 허용공간을 산출하는 동작을 포함하는, 방법. |
| 20 | 제19항에서, 상기 긴급 정차 허용공간을 산출하는 동작은, 상기 차량의 속도 및 상기 차량이 정지하기까지 걸리는 시간을 바탕으로 상기 긴급 정차 허용공간의 종방향 길이를 산출하는 동작을 포함하는, 방법. |
| 21 | 제20항에서, 상기 긴급 정차 허용공간을 산출하는 동작은, 상기 차량의 주행 경로 상에 상기 고정 장애물이 존재하는 지 여부를 판단하는 동작, 상기 고정 장애물이 존재하는 경우 상기 차량과 가까운 상기 긴급 정차 허용공간의 일측에서 상기 고정 장애물까지의 거리를 산출하는 동작, 및상기 고정 장애물까지의 거리와 상기 긴급 정차 허용공간의 종방향 길이를 비교하여 더 작은 값을 상기 긴급 정차 허용공간의 최종 종방향 길이로 선택하는 동작을 포함하는, 방법. |
| 22 | 제19항에서, 상기 긴급 정차 허용공간을 산출하는 동작은, 상기 차량의 폭과 미리 설정된 정차 여유 상수값을 바탕으로 상기 긴급 정차 허용공간의 횡방향 길이를 산출하는 동작을 포함하는, 방법. |
| 23 | 제19항에서, 상기 긴급 정차 허용공간을 산출하는 동작은, 상기 차량의 폭과 미리 설정된 최대 차선 허용 범위값을 바탕으로 상기 긴급 정차 허용공간의 횡방향 길이를 산출하는 동작을 포함하는, 방법. |
| 24 | 제21항에서, 상기 긴급 정차 허용공간을 산출하는 동작은, 상기 긴급 정차 허용공간 내 상기 동적 장애물이 존재하는 지 여부를 판단하여 충돌 위험을 예측하고, 충돌 위험이 예측되면 상기 긴급 정차 허용공간의 최종 종방향 길이를 보정하는, 방법. |