| 번호 | 청구항 |
|---|---|
| 4 | 제3항에서, 상기 프로세서는, 상기 차량의 위치 정보 및 미리 저장된 디지털 지도를 바탕으로 상기 차량에서 상기 직선 정차 허용공간의 종방향 종료점까지의 거리를 산출하는, 차량. |
| 1 | 자율 주행 차량에 있어서, 상기 차량의 주변 환경을 감지하여 주변 환경 정보를 생성하는 적어도 하나의 센서;상기 차량의 상태를 모니터링하여 차량 상태 정보를 생성하고, 상기 차량의 자율 주행 중에 상기 주변 환경 정보 및 상기 차량 상태 정보 중 적어도 하나를 기반으로 최소 위험 조작이 필요한지 여부를 판단하는 프로세서; 및상기 프로세서의 제어에 따라 상기 차량의 작동을 제어하는 컨트롤러를 포함하고, 상기 프로세서는, 상기 최소 위험 조작이 필요한 것으로 판단되면, 최소 위험 조작 타입을 결정하고, 결정된 최소 위험 조작 타입이 교차로 내 직선 정차 타입인 경우, 직선 정차 허용공간 및 충돌 위험을 예측하는, 차량. |
| 2 | 제1항에서,상기 프로세서는, 미리 설정된 차선의 폭 및 미리 설정된 최대 차선 허용범위값을 바탕으로 상기 직선 정차 허용공간의 횡방향 길이를 산출하는, 차량. |
| 3 | 제2항에서, 상기 프로세서는, 상기 차량의 속도 및 미리 설정된 최대 감가속도를 바탕으로 상기 차량에서 상기 직선 정차 허용공간의 종방향 시작점까지의 거리를 산출하는, 차량. |
| 5 | 제4항에서, 상기 프로세서는, 상기 차량의 위치 정보 및 미리 저장된 디지털 지도를 바탕으로 상기 차량에서 교차로까지의 거리를 산출하는, 차량. |
| 6 | 제5항에서, 상기 프로세서는, 상기 직선 정차 허용공간의 종방향 시작점까지의 거리와 상기 차량에서 교차로까지의 거리의 차이와 미리 설정된 기준값을 비교한 결과에 기반하여, 교차로 진입 전 직선 정차가 가능한지 여부를 판단하는, 차량. |
| 7 | 제6항에서, 상기 프로세서는, 상기 직선 정차 허용공간의 종방향 시작점까지의 거리와 상기 차량에서 교차로까지의 거리의 차이가 미리 설정된 기준값 보다 작으면, 교차로 진입 전 직선 정차가 가능한 것으로 판단하는, 차량. |
| 8 | 제6항에서, 상기 프로세서는, 상기 직선 정차 허용공간의 종방향 시작점까지의 거리와 상기 차량에서 교차로까지의 거리의 차이가 미리 설정된 기준값 보다 크면, 교차로 통과시 충돌 위험을 예측하고, 교차로 통과시 충돌 위험이 없다고 판단되면 교차로 통과 후 직선 정차를 수행하는, 차량. |
| 9 | 제8항에서, 상기 프로세서는, 상기 차량의 속도 및 상기 직선 정차 허용공간의 종방향 종료점까지의 거리를 바탕으로 상기 차량의 교차로 통과 시간을 산출하고, 신호등 정보 및 주변차량 정보를 바탕으로 상기 직선 정차 허용공간에 진입 가능한 타차량이 존재하는 지 여부를 판단하며, 상기 직선 정차 허용공간에 진입 가능한 타차량이 존재하는 것으로 판단되면, 주변차량 정보를 바탕으로 상기 차량의 측면 방향에 제1 타차량이 존재하는 지 여부를 판단하며, 상기 차량의 측면 방향에 상기 제1 타차량이 존재하는 것으로 판단되면, 상기 제1 타차량의 속도 및 상기 제1 타차량에서 상기 직선 정차 허용공간까지의 거리를 바탕으로 상기 제1 타차량의 직선 정차 허용공간 진입 시간을 산출하며, 상기 차량의 교차로 통과 시간과 상기 제1 타차량의 상기 직선 정차 허용공간 진입 시간을 비교한 결과에 기반하여 상기 차량의 교차로 통과 후 직선 정차를 수행할 지 여부를 판단하는, 차량. |
| 10 | 제9항에서, 상기 프로세서는, 상기 차량의 교차로 통과 시간이 상기 제1 타차량의 상기 직선 정차 허용공간 진입 시간 보다 작은 경우, 상기 차량의 교차로 통과 후 직선 정차를 수행하는, 차량. |
| 11 | 제9항에서, 상기 프로세서는, 상기 차량의 교차로 통과 시간이 상기 제1 타차량의 상기 직선 정차 허용공간 진입 시간 보다 큰 경우, 상기 차량의 교차로 내 직선 정차를 수행하는, 차량. |
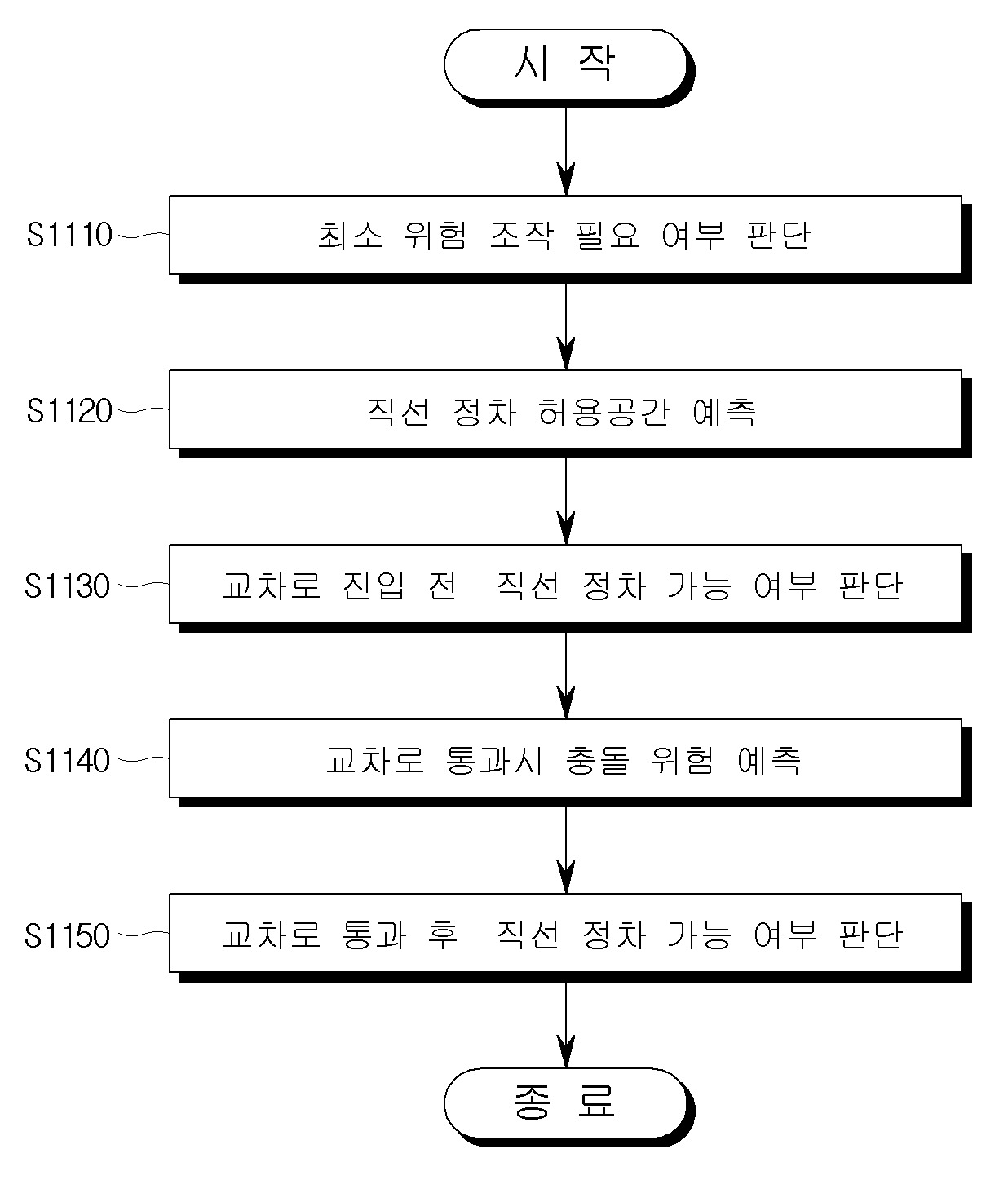
| 12 | 자율 주행 차량의 동작 방법에 있어서,상기 차량의 자율 주행 동안에 상기 차량의 주변 환경을 감지하여 주변 환경 정보를 획득하는 동작;상기 차량의 자율 주행 동안에 상기 차량의 상태를 모니터링하여 차량 상태 정보를 획득하는 동작; 상기 차량의 자율 주행 중에 상기 주변 환경 정보 및 상기 차량 상태 정보 중 적어도 하나를 기반으로 최소 위험 조작이 필요한지 여부를 판단하는 동작; 상기 최소 위험 조작이 필요한 것으로 판단되면, 최소 위험 조작 타입을 결정하는 동작; 및결정된 최소 위험 조작 타입이 교차로 내 직선 정차 타입인 경우, 직선 정차 허용공간을 예측하는 동작을 포함하는, 방법. |
| 13 | 제12항에서, 상기 직선 정차 허용공간을 예측하는 동작은, 미리 설정된 차선의 폭 및 미리 설정된 최대 차선 허용범위값을 바탕으로 상기 직선 정차 허용공간의 횡방향 길이를 산출하는 동작, 상기 차량의 속도 및 미리 설정된 최대 감가속도를 바탕으로 상기 차량에서 상기 직선 정차 허용공간의 종방향 시작점까지의 거리를 산출하는 동작, 상기 차량의 위치 정보 및 미리 저장된 디지털 지도를 바탕으로 상기 차량에서 상기 직선 정차 허용공간의 종방향 종료점까지의 거리를 산출하는 동작, 및상기 차량의 위치 정보 및 미리 저장된 디지털 지도를 바탕으로 상기 차량에서 교차로까지의 거리를 산출하는 동작을 포함하는, 방법. |
| 14 | 제13항에서, 상기 직선 정차 허용공간을 예측하는 동작 이후, 상기 직선 정차 허용공간의 종방향 시작점까지의 거리와 상기 차량에서 교차로까지의 거리의 차이와 기준값을 비교한 결과에 기반하여, 교차로 진입 전 직선 정차가 가능한지 여부를 판단하는 동작을 더 포함하는, 방법. |
| 15 | 제14항에서, 상기 교차로 진입 전 직선 정차가 가능한지 여부를 판단하는 동작은, 상기 직선 정차 허용공간의 종방향 시작점까지의 거리와 상기 차량에서 교차로까지의 거리의 차이가 미리 설정된 기준값 보다 작으면, 교차로 진입 전 직선 정차가 가능한 것으로 판단하는, 방법. |
| 16 | 제14항에서, 상기 교차로 진입 전 직선 정차가 가능한지 여부를 판단하는 동작 이후, 상기 직선 정차 허용공간의 종방향 시작점까지의 거리와 상기 차량에서 교차로까지의 거리의 차이가 미리 설정된 기준값 보다 크면, 교차로 통과시 충돌 위험을 예측하는 동작을 더 포함하는, 방법. |
| 17 | 제16항에서, 상기 교차로 통과시 충돌 위험을 예측하는 동작은, 상기 차량의 속도 및 상기 직선 정차 허용공간의 종방향 종료점까지의 거리를 바탕으로 상기 차량의 교차로 통과 시간을 산출하는 동작, 신호등 정보 및 주변차량 정보를 바탕으로 상기 직선 정차 허용공간에 진입 가능한 타차량이 존재하는 지 여부를 판단하는 동작, 상기 직선 정차 허용공간에 진입 가능한 타차량이 존재하는 것으로 판단되면, 주변차량 정보를 바탕으로 상기 차량의 측면 방향에 제1 타차량이 존재하는 지 여부를 판단하는 동작, 및상기 차량의 측면 방향에 상기 제1 타차량이 존재하는 것으로 판단되면, 상기 제1 타차량의 속도 및 상기 제1 타차량에서 상기 직선 정차 허용공간까지의 거리를 바탕으로 상기 제1 타차량의 직선 정차 허용공간 진입 시간을 산출하는 동작을 포함하는, 방법. |
| 18 | 제17항에서, 상기 교차로 통과시 충돌 위험을 예측하는 동작 이후, 상기 차량의 교차로 통과 시간과 상기 제1 타차량의 상기 직선 정차 허용공간 진입 시간을 비교한 결과에 기반하여 상기 차량의 교차로 통과 후 직선 정차가 가능한지 여부를 판단하는 동작을 더 포함하는, 방법. |
| 19 | 제18항에서, 상기 차량의 교차로 통과 후 직선 정차가 가능한지 여부를 판단하는 동작은, 상기 차량의 교차로 통과 시간이 상기 제1 타차량의 상기 직선 정차 허용공간 진입 시간 보다 작은 경우, 상기 차량의 교차로 통과 후 직선 정차가 가능한 것으로 판단하는, 방법. |
| 20 | 제18항에서, 상기 차량의 교차로 통과 후 직선 정차가 가능한지 여부를 판단하는 동작은, 상기 차량의 교차로 통과 시간이 상기 제1 타차량의 상기 직선 정차 허용공간 진입 시간 보다 큰 경우, 상기 차량의 교차로 내 직선 정차를 수행하는, 방법. |