| 번호 | 청구항 |
|---|---|
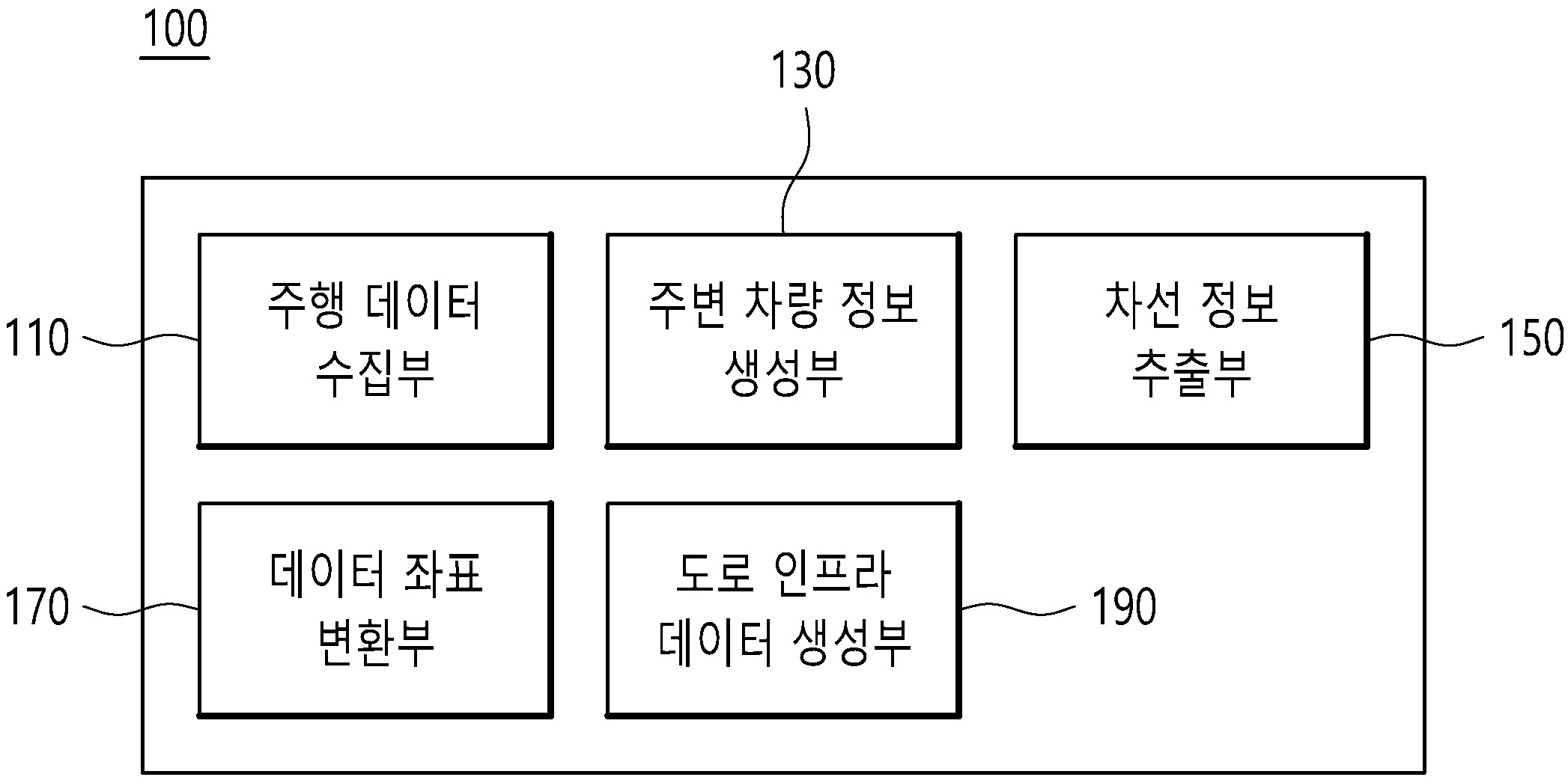
| 1 | 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치에 있어서,복수의 센서를 이용하여 자차량의 주행 데이터를 수집하는 주행 데이터 수집부;검출 및 추적 알고리즘(detection 0026# tracking algorithm)을 이용하여 미리 결정된 관심 구간 내에서 상기 자차량과 함께 주행하는 복수의 주변 차량의 추적 데이터를 생성하는 주변 차량 정보 생성부;상기 자차량 및 상기 주변 차량의 위치를 기초로 상기 관심 구간의 상세 도로 지도로부터 차선 정보를 추출하는 차선 정보 추출부;상기 관심 구간내의 상기 자차량의 주행 데이터, 상기 주변 차량의 추적 데이터를 도로 좌표계로 변환하는 데이터 좌표 변환부; 및상기 도로 좌표계로 변환된 상기 자차량의 주행 데이터, 상기 주변 차량의 추적 데이터의 복수의 시계열 데이터를 포함하는 도로 인프라 데이터를 생성하는 도로 인프라 데이터 생성부;를 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 2 | 청구항 1에 있어서,상기 자차량 및 주변 차량의 복수의 주행 상황에 대한 가상 데이터를 추가하여 상기 도로 인프라 데이터를 증강하는 도로 인프라 데이터 합성부;를 더 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 3 | 청구항 1에 있어서,상기 센서는 상기 자차량에 장착된 GPS(Global Positioning System), 라이다, 레이더, 및 카메라를 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 4 | 청구항 1에 있어서,상기 자차량 및 상기 주변 차량은 자율 주행 차량이고, 상기 주행 데이터는 상기 자차량의 ID, 상기 자차량의 폭 및 길이, 주행 위치, 주행 차선 ID, 주행 속도, 방향각 중 하나 이상을 포함하고, 상기 추적 데이터는 각각의 상기 주변 차량의 ID, 상기 자차량과 상기 주변 차량의 상대적 위치, 상기 주변 차량 간의 상대적 위치, 각각의 상기 주변 차량의 폭 및 길이 중 하나 이상을 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 5 | 청구항 3에 있어서,상기 자차량 및 상기 주변 차량의 상기 도로의 차선 측위를 보정하는 차선 측위 보정부를 더 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 6 | 청구항 5에 있어서,상기 차선 측위 보정부는,상기 자차량 및 상기 주변 차량을 상기 GPS로부터 수신된 내비게이션 맵(navigation map)에 측위시킨 후 상기 내비게이션 맵을 상기 관심 구간의 상기 상세 도로 지도 상에 매칭시키는 맵 매칭부;상기 관심 구간의 도로의 가드레일을 인식하고, 상기 가드레일 및 상기 차선 정보를 기초로 상기 자차량 및 상기 주변 차량의 위치를 보정하는 차선 수준 측위 보정부; 및상기 자차량에 장착된 카메라에서 측정된 차선 내에의 횡방향 오프셋 값(lateral offset) 값을 사용하여 상기 상세 도로 지도 내 횡방향 위치 보정을 수행하는 횡방향 위치 보정부;를 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 7 | 청구항 1에 있어서,상기 데이터 좌표 변환부는,상기 도로 좌표계에서의 상기 자차량과 상기 주변 차량 간의 X축 상의 거리, Y축 상의 거리, 변환 헤딩각의 크기의 정보를 갖는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 8 | 청구항 7에 있어서,상기 자차량의 주행 데이터, 상기 주변 차량의 추적 데이터는 시계열 데이터이고,상기 인프라 데이터 생성부는 상기 관심 구간의 상기 도로 인프라 데이터와 미리 결정된 복수의 시간 간격 후에 복수의 추가 관심 구간에서의 상기 자차량의 주행 데이터, 상기 주변 차량의 추적 데이터 및 상기 차선 정보를 포함하는 추가 도로 인프라 데이터를 시계열적으로 병합하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 9 | 청구항 8에 있어서,상기 도로 인프라 데이터 합성부는,상기 시계열적으로 병합된 상기 관심 구간의 상기 도로 인프라 데이터와 상기 복수의 추가 관심 구간에서의 상기 추가 도로 인프라 데이터를 중앙 차선을 기준으로 반전시킨 반대방향 도로 인프라 데이터를 병합하는 반대방향 도로 인프라 데이터 병합부;를 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 10 | 청구항 9에 있어서,상기 도로 인프라 데이터 합성부는,상기 관심 구간 및 상기 복수의 추가 관심 구간에서의 차선 변경 차량, 정지 차량, 갓길 주차 차량, 및 역주행 차량의 주행 데이터를 병합하는 추가 도로 인프라 데이터 병합부를 더 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 장치. |
| 11 | 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법에 있어서,복수의 센서를 이용하여 자차량의 주행 데이터를 수집하는 주행 데이터 수집 단계;검출 및 추적 알고리즘(detection 0026# tracking algorithm)을 이용하여 미리 결정된 관심 구간 내에서 상기 자차량과 함께 주행하는 복수의 주변 차량의 추적 데이터를 생성하는 추적 데이터 생성 단계;상기 자차량 및 상기 주변 차량의 위치를 기초로 상기 관심 구간의 상세 도로 지도로부터 차선 정보를 추출하는 차선 정보 추출 단계;상기 관심 구간내의 상기 자차량의 주행 데이터, 상기 주변 차량의 추적 데이터를 도로 좌표계로 변환하는 데이터 좌표 변환 단계; 및상기 도로 좌표계로 변환된 상기 자차량의 주행 데이터, 상기 주변 차량의 추적 데이터의 복수의 시계열 데이터를 포함하는 도로 인프라 데이터를 생성하는 도로 인프라 데이터 생성 단계;를 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |
| 12 | 청구항 11에 있어서,상기 자차량 및 주변 차량의 복수의 주행 상황에 대한 가상 데이터를 추가하여 상기 도로 인프라 데이터를 증강하는 도로 인프라 데이터 합성 단계;를 더 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |
| 13 | 청구항 11에 있어서,상기 센서는 상기 자차량에 장착된 GPS(Global Positioning System), 라이다, 레이더, 및 카메라를 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |
| 14 | 청구항 11에 있어서,상기 자차량 및 상기 주변 차량은 자율 주행 차량이고, 상기 주행 데이터는 상기 자차량의 ID, 상기 자차량의 폭 및 길이, 주행 위치, 주행 차선 ID, 주행 속도, 방향각 중 하나 이상을 포함하고, 상기 추적 데이터는 각각의 상기 주변 차량의 ID, 상기 자차량과 상기 주변 차량의 상대적 위치, 상기 주변 차량 간의 상대적 위치, 각각의 상기 주변 차량의 폭 및 길이 중 하나 이상을 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |
| 15 | 청구항 13에 있어서,상기 자차량 및 상기 주변 차량의 상기 도로의 차선 측위를 보정하는 차선 측위 보정 단계를 더 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |
| 16 | 청구항 15에 있어서,상기 차선 측위 보정 단계는,상기 자차량 및 상기 주변 차량을 상기 GPS로부터 수신된 내비게이션 맵(navigation map)에 측위시킨 후 상기 내비게이션 맵을 상기 관심 구간의 상기 상세 도로 지도 상에 매칭시키는 맵 매칭 단계;상기 관심 구간의 도로의 가드레일을 인식하고, 상기 가드레일 및 상기 차선 정보를 기초로 상기 자차량 및 상기 주변 차량의 위치를 보정하는 차선 수준 측위 보정 단계; 및상기 자차량에 장착된 카메라에서 측정된 차선 내에의 횡방향 오프셋 값(lateral offset) 값을 사용하여 상기 상세 도로 지도 내 횡방향 위치 보정을 수행하는 횡방향 위치 보정 단계;를 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |
| 17 | 청구항 11에 있어서,상기 데이터 좌표 변환을 수행함으로써,상기 도로 좌표계에서의 상기 자차량과 상기 주변 차량 간의 X축 상의 거리, Y축 상의 거리, 변환 헤딩각의 크기의 정보를 획득하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |
| 18 | 청구항 17에 있어서,상기 자차량의 주행 데이터, 상기 주변 차량의 추적 데이터는 시계열 데이터이고,상기 인프라 데이터 생성 단계는 상기 관심 구간의 상기 도로 인프라 데이터와 미리 결정된 복수의 시간 간격 후에 복수의 추가 관심 구간에서의 상기 자차량의 주행 데이터, 상기 주변 차량의 추적 데이터 및 상기 차선 정보를 포함하는 추가 도로 인프라 데이터를 시계열적으로 병합하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |
| 19 | 청구항 18에 있어서,상기 도로 인프라 데이터 합성 단계는,상기 시계열적으로 병합된 상기 관심 구간의 상기 도로 인프라 데이터와 상기 복수의 추가 관심 구간에서의 상기 추가 도로 인프라 데이터를 중앙 차선을 기준으로 반전시킨 반대방향 도로 인프라 데이터를 병합하는 반대방향 도로 인프라 데이터 병합 단계;를 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |
| 20 | 청구항 19에 있어서,상기 도로 인프라 데이터 합성 단계는,상기 관심 구간 및 상기 복수의 추가 관심 구간에서의 차선 변경 차량, 정지 차량, 갓길 주차 차량, 및 역주행 차량의 주행 데이터를 병합하는 추가 도로 인프라 데이터 병합 단계를 더 포함하는, 차량의 도로 주행 데이터를 이용한 도로 인프라 데이터 생성 및 합성 방법. |