| 번호 | 청구항 |
|---|---|
| 11 | 제 10 항에 있어서, 상기 마운트는 상기 제 1 조인트를 통과하며 중력방향으로 연장되는 수직축을 중심으로 회전하도록 구성되는 상지보조로봇. |
| 16 | 제 1 항 또는 제 14 항에 있어서, 상기 제 2 링크에 회전가능하게 연결되는 제 3 조인트를 포함하며, 상기 상지의 전완을 지지하도록 구성되는 제 3 링크를 더 포함하는 상지보조로봇. |
| 12 | 제 1 항에 있어서, 상기 제 1 및 제 2 링크들에 제공되며, 상기 제 1 링크에 대해 상기 제 2 링크의 운동을 허용하도록 구성되는 제 1 평행사변형 기구를 더 포함하며, 상기 제 1 평행사변형 기구는 상기 제 1 링크에 회전가능하게 연결되는 제 1 바 부재 및 상기 제 1 바 부재 및 상기 제 2 링크에 각각 회전가능하게 연결되는 제 2 바 부재를 포함하는 상지보조로봇. |
| 13 | 삭제 |
| 14 | 제 1 항에 있어서, 상기 제 2 링크의 끝단에 결합되며, 상기 상지의 팔꿈치를 지지하도록 구성되는 제 1 서포터를 더 포함하는 상지보조로봇. |
| 15 | 삭제 |
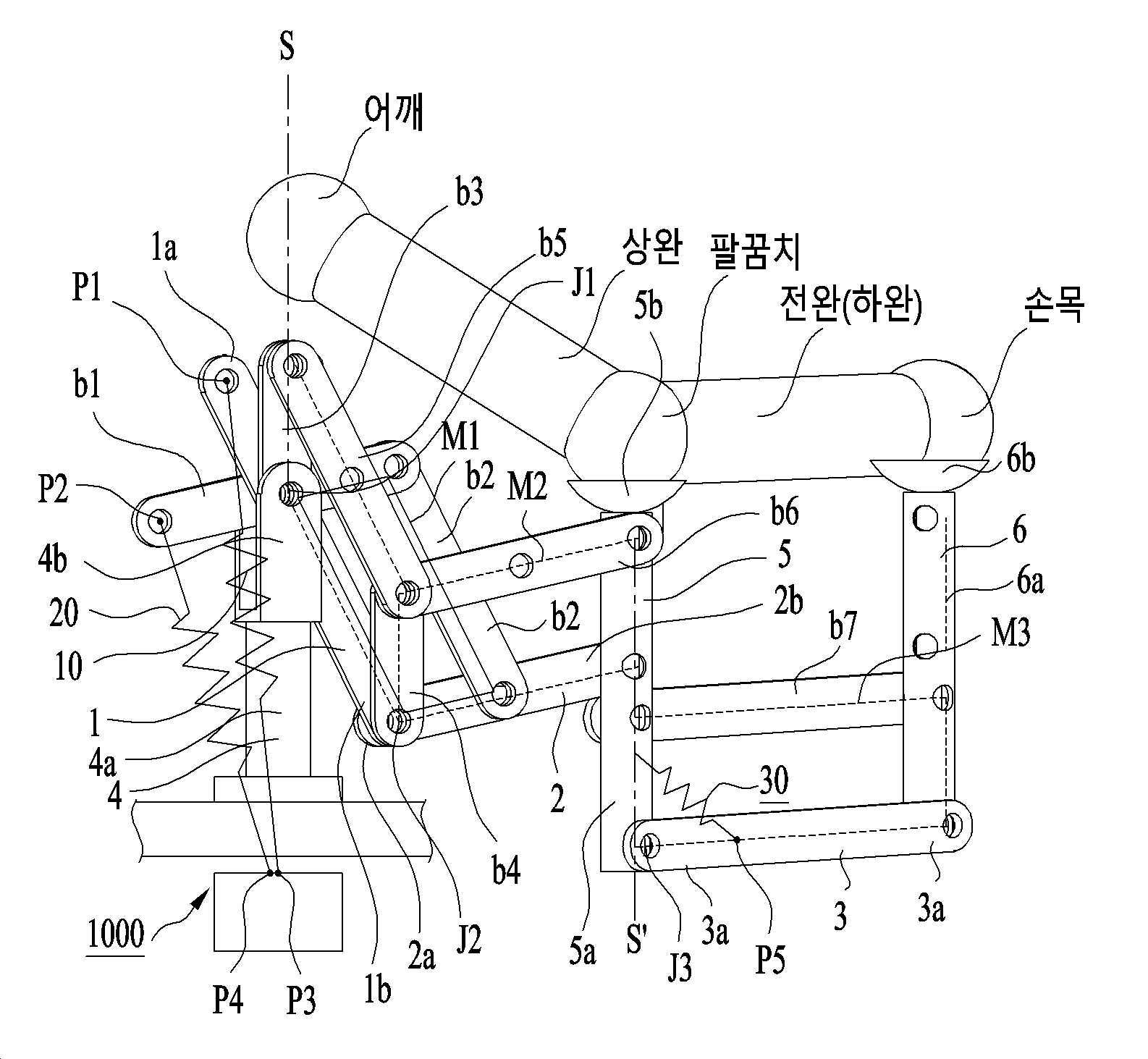
| 1 | 상지의 어깨로부터 팔꿈치를 향해 연장되며, 소정의 부속장치에 회전가능하게 연결되는 제 1 조인트를 포함하는 제 1 링크; 상기 제 1 링크에 회전가능하게 연결되는 제 2 조인트를 포함하며, 상기 제 1 링크로부터 상기 상지의 팔꿈치까지 연장되어, 상기 제 1 링크와 함께 상기 상지의 상완을 지지하도록 구성되는 제 2 링크; 상기 제 1 링크에 연결되는 제 1 연결부를 포함하며, 상기 제 1 연결부를 통해 상기 제 1 조인트에 소정 크기의 힘을 가하도록 구성되는 제 1 액츄에이터;상기 제 2 링크에 연결되는 제 2 연결부를 포함하며, 상기 제 2 연결부를 통해 상기 제 2 조인트에 소정크기의 힘을 가하도록 구성되는 제 2 액츄에이터; 및 상기 제 1 및 제 2 액츄에이터와 각각 연결되는 제 3 및 제 4 연결부들을 포함하며, 가해지는 중력을 상쇄하면서 의도된 방향으로 힘을 발생시키도록 상기 제 1 및 제 2 액츄에이터에 의해 상기 제 1 및 제 2 조인트들에 가해지는 힘들의 방향을 변경하도록 구성되는 조절모듈을 포함하는 상지보조로봇. |
| 2 | 제 1 항에 있어서, 상기 제 1 액츄에이터는: 상기 제 1 연결부를 형성하도록 상기 제 1 링크에 연결되는 제 1 끝단 및 상기 제 1 끝단에 대향되는 제 2 끝단을 갖는 제 1 와이어; 및 상기 조절모듈내에 수용되며, 상기 제 1 와이어의 제 2 끝단 및 상기 조절모듈에 각각 연결되어 상기 조절모듈의 이동에 따라 변형되도록 구성되는 제 1 스프링을 포함하는 상지보조로봇. |
| 3 | 제 1 항에 있어서, 상기 제 2 액츄에이터는:상기 제 2 연결부를 형성하도록 상기 제 2 링크에 연결되는 제 3 끝단 및 상기 제 3 끝단에 대향되는 제 4 끝단을 갖는 제 2 와이어: 및 상기 조절모듈내에 수용되며, 상기 제 2 와이어의 제 4 끝단 및 상기 조절모듈에 각각 연결되어 상기 조절모듈의 이동에 따라 변형되도록 구성되는 제 2 스프링을 포함하는 상지보조로봇. |
| 4 | 제 1 항에 있어서, 상기 조절모듈은 상기 제 1 및 제 2 액츄에이터에 의해 가해지는 힘들의 방향들을 변경하기 위해, 상기 제 3 및 제 4 연결부들의 위치들을 변경하도록 구성되는 상지보조로봇. |
| 5 | 제 4 항에 있어서, 상기 조절모듈은 상기 제 3 및 제 4 연결부들의 위치들을 변경하기 위해, 상기 제 3 및 제 4 연결부들을 상기 제 1 조인트를 통과하며 중력방향으로 연장되는 수직축으로부터 소정거리로 옵셋시키거나 이격시켜, 상기 제 1 및 제 2 조인트에 가해지는 상기 제 1 및 제 2 액츄에이터들의 힘들로부터 중력방향에 대향되는 분력 및 의도된 방향으로의 분력을 발생시키도록 구성되는 상지보조로봇. |
| 6 | 제 5 항에 있어서, 상기 조절모듈은 상기 제 3 및 제 4 연결부들을 상기 수직축으로부터 옵셋시키기 위해, 상기 제 3 및 제 4 연결부들을 수평방향으로 이동시키도록 구성되는 상지보조로봇. |
| 7 | 제 1 항에 있어서, 상기 조절모듈은 상기 제 1 및 제 2 액츄에이터들에 의해 상기 제 1 및 제 2 조인트에 가해지는 힘들의 크기들을 변경하도록 더 구성되는 상지보조로봇. |
| 8 | 제 7 항에 있어서, 상기 조절모듈은 상기 제 1 및 제 3 연결부들에 가해지는 힘들의 크기들을 변경하기 위해, 상기 제 1 및 제 3 연결부들사이의 제 1 거리 및 상기 제 2 및 제 4 연결부들사이의 제 2 거리를 변경하도록 구성되는 상지보조로봇. |
| 9 | 제 8 항에 있어서, 상기 조절모듈은 상기 제 1 및 제 2 거리들을 변경하기 위해, 상기 제 3 및 제 4 연결부들을 수직방향으로 이동시키도록 구성되는 상지보조로봇. |
| 10 | 제 1 항에 있어서, 소정의 평면상에 설치되며, 상기 제 1 링크에 회전가능하게 결합되어 상기 제 1 및 제 2 링크들을 상기 평면에 대해 지지도록 구성되는 마운트를 더 포함하는 상지보조로봇. |
| 17 | 제 16 항에 있어서, 상기 제 3 링크에 연결되어, 상기 제 3 조인트에 소정 크기의 힘을 가하도록 구성되는 제 3 액츄에이터를 더 포함하는 상지보조로봇. |
| 18 | 제 16 항에 있어서, 상기 제 3 링크의 끝단에 결합되며, 상기 상지의 손목을 지지하도록 구성되는 제 2 서포터를 더 포함하는 상지보조로봇. |
| 19 | 삭제 |
| 20 | 제 1 항에 있어서, 상기 조절모듈은:상기 제 1 및 제 2 액츄에이터의 부품들을 수용하도록 구성되는 하우징;상기 하우징에 제공되어 상기 하우징을 수평방향으로 이동시키도록 구성되는 제 1 구동기; 및 상기 하우징에 제공되어 상기 하우징을 수직방향으로 이동시키도록 구성되는 제 2 구동기를 포함하는 상지보조로봇. |
| 21 | 제 10 항에 있어서, 상기 조절모듈은 상기 마운트아래에 배치되도록 구성되는 상지보조로봇. |
| 22 | 제 10 항에 있어서, 상기 조절모듈은 상기 마운트의 측부에 장착되도록 구성되는 상지보조로봇. |
| 23 | 삭제 |
| 24 | 삭제 |
| 25 | 삭제 |
| 26 | 삭제 |
| 27 | 삭제 |
| 28 | 삭제 |
| 29 | 삭제 |
| 30 | 삭제 |
| 31 | 삭제 |
| 32 | 삭제 |
| 33 | 삭제 |
| 34 | 삭제 |
| 35 | 삭제 |
| 36 | 삭제 |
| 37 | 삭제 |
| 38 | 삭제 |
| 39 | 삭제 |
| 40 | 삭제 |
| 41 | 삭제 |
| 42 | 삭제 |
| 43 | 삭제 |
| 44 | 삭제 |
| 45 | 삭제 |
| 46 | 삭제 |