| 번호 | 청구항 |
|---|---|
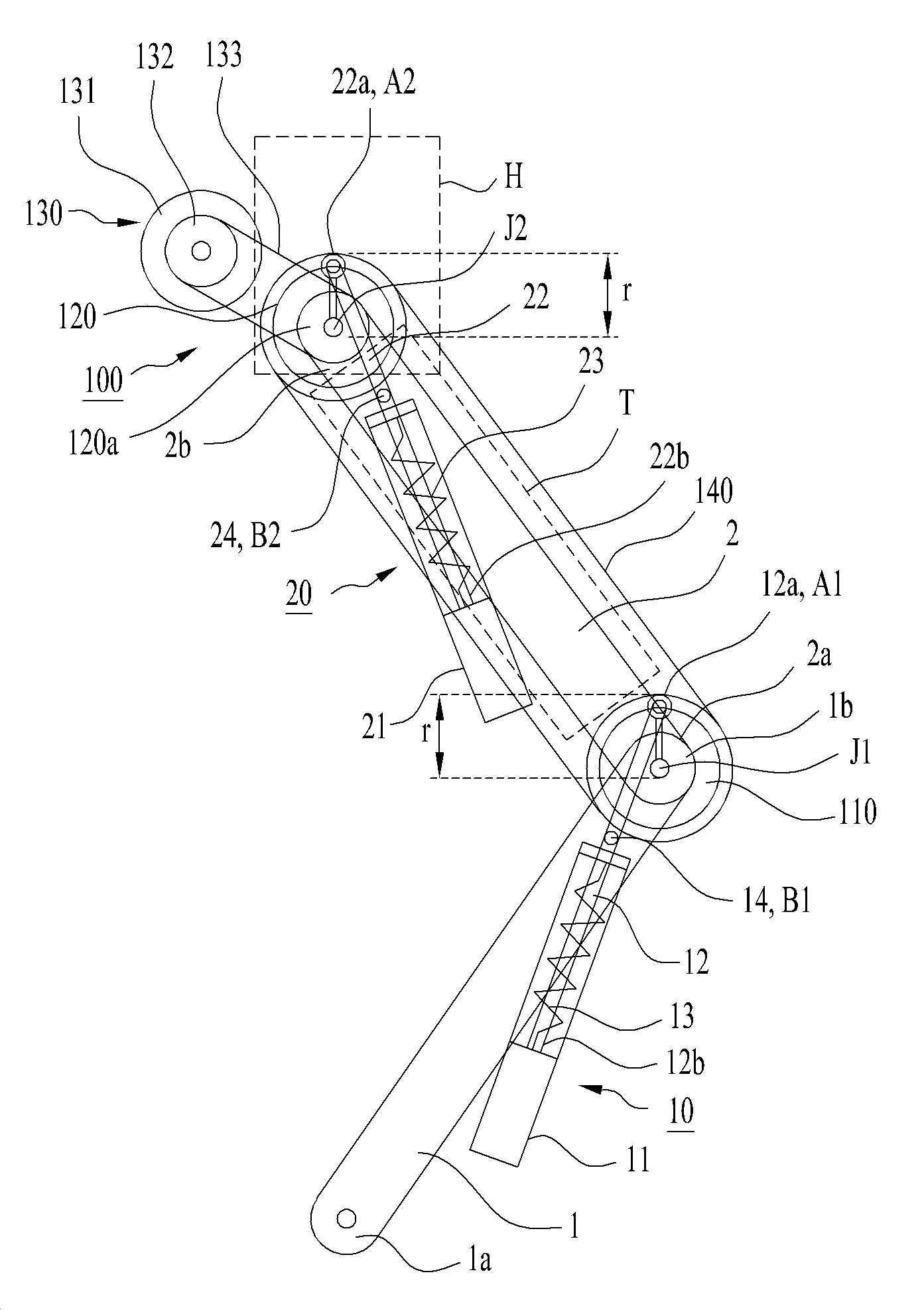
| 1 | 하지의 하퇴부를 지지하도록 구성되는 제 1 링크;상기 하지의 대퇴부를 지지하도록 구성되며, 상기 제 1 링크에 회전가능하게 연결되며 무릅에 배치되는 제 1 조인트 및 상기 제 1 조인트에 대향되게 고관절에 배치되는 제 2 조인트를 포함하는 제 2 링크;상기 제 1 조인트에 인접하게 배치되면서 상기 제 1 조인트에 회전가능하게 연결되는 제 1 연결부 및 상기 제 1 링크의 몸체에 회전가능하게 연결되며 상기 제 1 연결부와 서로 직접 연결되는 제 2 연결부를 포함하며, 상기 제 1 연결부에 소정크기의 힘을 가해 상기 제 2 링크의 제 1 조인트에 상기 힘을 가하도록 구성되는 제 1 엑츄에이터;상기 제 2 조인트에 인접하게 배치되면서 상기 제 2 조인트에 회전가능하게 연결되는 제 3 연결부 및 상기 제 2 링크의 몸체에 회전가능하게 연결되며 상기 제 3 연결부와 서로 직접 연결되는 제 4 연결부를 포함하며, 상기 제 3 연결부에 소정크기의 힘을 가해 상기 제 2 링크의 제 2 조인트에 상기 힘을 가하도록 구성되는 제 2 엑츄에이터; 및 상기 제 1 및 제 2 엑츄에이터에 결합되며, 가해지는 중력을 상쇄하면서 의도된 방향으로 힘을 발생시키도록 상기 제 1 및 제 2 엑츄에이터들에 의해 상기 제 1 및 제 3 연결부들에 가해지는 힘들의 방향들을 변경하도록 구성되는 제 1 조절모듈을 포함하며,상기 제 1 조절모듈은 상기 제 1 및 제 2 엑츄에이터들에 의해 가해지는 힘들의 방향들을 변경하기 위해, 상기 제 1 및 제 2 링크들의 운동들에 독립적으로, 상기 제 1 및 제 2 조인트들을 중심으로 설정된 일정반경을 갖는 궤적들을 따라 상기 제 1 및 제 3 연결부들을 각각 선회시켜, 상기 제 1 및 제 2 액츄에이터들의 힘들로부터 중력방향에 대향되는 분력 및 의도된 방향으로의 분력을 발생시키도록 구성되는 하지보조로봇. |
| 2 | 제 1 항에 있어서, 상기 제 1 조절모듈은 상기 제 1 및 제 2 링크들의 위치들에 독립적으로, 상기 제 1 및 제 2 조인트들을 각각 통과하는 수직축들에 대한 상기 제 1 및 제 3 연결부들의 상대적 위치들을 변경하도록 구성되는 하지보조로봇. |
| 3 | 제 1 항에 있어서,상기 제 1 조절모듈은:상기 제 1 및 제 3 연결부들을 상기 제 1 및 제 2 조인트들을 각각 통과하는 수직축들에 각각 배치하여, 상기 제 1 및 제 2 엑츄에이터들의 힘들을 모두 중력방향에 대향되게 상기 수직축을 따라 작용하도록 배향시키는 제 1 모드; 및상기 제 1 및 제 3 연결부들을 상기 수직축들로부터 소정거리로 옵셋시켜, 상기 제 1 및 제 2 액츄에이터들의 힘들로부터 중력방향에 대향되는 분력 및 의도된 방향으로의 분력을 발생시키는 제 2 모드를 수행하도록 구성되는 하지보조로봇. |
| 4 | 제 1 항에 있어서, 상기 제 1 조절모듈은:상기 제 1 조인트에 회전가능하게 설치되며, 상기 제 1 엑츄에이터의 제 1 연결부가 상기 제 1 조인트로부터 소정거리로 이격되면서 회전가능하게 결합되는 제 1 풀리(pulley); 상기 제 2 조인트에 회전가능하게 설치되며, 상기 제 2 엑츄에이터의 제 3 연결부가 상기 제 2 조인트로부터 소정거리로 이격되면서 회전가능하게 결합되는 제 2 풀리; 및상기 제 1 및 제 2 풀리들에 동력을 제공하여 상기 제 1 및 제 2 풀리들과 상기 제 1 및 제 3 연결부들을 회전시키도록 구성되는 제 1 구동기(driver)를 포함하는 하지보조로봇. |
| 5 | 제 4 항에 있어서, 상기 제 1 조절모듈은 상기 제 1 및 제 3 연결부들을 동시에 동일방향으로 동일한 거리만큼 이동시키도록 구성되는 제 1 동조기(synchronizer)를 더 포함하는 하지보조로봇. |
| 6 | 제 5 항에 있어서, 상기 제 1 동조기는 상기 제 1 및 제 2 풀리들을 동시에 동일방향으로 동일한 각도로 상기 제 1 및 제 2 조인트에 대해 회전시키도록 구성되는 하지보조로봇. |
| 7 | 제 1 항에 있어서, 상기 제 1 및 제 2 엑츄에이터들에 선택적으로 맞물리어, 상기 제 1 및 제 2 엑츄에이터들에 의해 상기 제 1 및 제 3 연결부들에 가해지는 힘들의 크기들을 변경하도록 구성되는 제 2 조절모듈을 더 포함하는 하지보조로봇. |
| 8 | 제 7 항에 있어서, 상기 제 2 조절모듈은 상기 제 1 및 제 3 연결부들에 가해지는 힘들의 크기들을 변경하기 위해, 상기 제 1 및 제 2 연결부들사이의 제 1 거리 및 상기 제 3 및 제 4 연결부들사이의 제 2 거리를 변경하도록 구성되는 하지보조로봇. |
| 9 | 제 8 항에 있어서, 상기 제 2 조절모듈은 상기 제 2 및 제 4 연결부들을 상기 제 1 및 제 2 링크들의 길이방향으로 이동시키도록 구성되는 하지보조로봇. |
| 10 | 제 7 항에 있어서, 상기 제 2 조절모듈은:상기 제 1 조인트에 회전가능하게 설치되며, 회전하는 동안 상기 제 1 엑츄에이터의 제 2 연결부와 접촉하면서 상기 제 2 연결부를 직선운동시키도록 구성되는 제 1 캠(cam); 상기 제 2 조인트에 회전가능하게 설치되며, 회전하는 동안 상기 제 2 엑츄에이터의 제 4 연결부와 접촉하면서 상기 제 4 연결부를 직선운동시키도록 구성되는 제 2 캠; 및상기 제 1 및 제 2 캠들에 결합되어 상기 제 1 및 제 2 캠들을 회전시키도록 구성되는 제 2 구동기를 포함하는 하지보조로봇. |
| 11 | 제 10 항에 있어서, 상기 제 2 조절모듈은 상기 제 2 및 제 4 연결부들을 동시에 동일한 거리만큼 이동시키도록 구성되는 제 2 동조기를 더 포함하는 하지보조로봇. |
| 12 | 제 11 항에 있어서, 상기 제 2 동조기는 상기 제 1 및 제 2 캠들을 동시에 동일방향으로 동일한 각도로 상기 제 1 및 제 2 조인트들에 대해 회전시키도록 구성되는 하지보조로봇. |
| 13 | 제 1 항에 있어서, 상기 제 1 엑츄에이터는:상기 제 1 링크에 제공되는 제 1 실린더(cylinder);상기 제 1 연결부를 형성하도록 상기 제 1 조인트에 연결되는 제 1 끝단 및 상기 제 1 실린더내에 이동가능하게 배치되는 제 2 끝단을 포함하는 제 1 커넥팅 로드(connecting rod); 상기 제 1 실린더내에 수용되며, 상기 제 1 커넥팅 로드에 의해 변형되도록 구성되는 제 1 스프링; 및 상기 제 1 링크에 설치되어 상기 제 1 커넥팅 로드와 결합되며, 상기 제 1 커넥팅 로드의 회전운동 및 선형운동을 허용하도록 구성되는 제 1 힌지축(hinge shaft)를 포함하는 하지보조로봇. |
| 14 | 제 1 항에 있어서, 상기 제 2 엑츄에이터는:상기 제 2 링크에 제공되는 제 2 실린더;상기 제 2 연결부를 형성하도록 상기 제 2 조인트에 연결되는 제 3 끝단 및 상기 제 2 실린더내에 이동가능하게 배치되는 제 4 끝단을 포함하는 제 2 커넥팅 로드; 상기 제 2 실린더내에 수용되며, 상기 제 2 커넥팅 로드에 의해 변형되도록 구성되는 제 2 스프링; 및 상기 제 2 링크에 설치되어 상기 제 2 커넥팅 로드와 결합되며, 상기 제 2 커넥팅 로드의 회전운동 및 선형운동을 허용하도록 구성되는 제 2 힌지축을 포함하는 하지 보조 로봇. |