| 번호 | 청구항 |
|---|---|
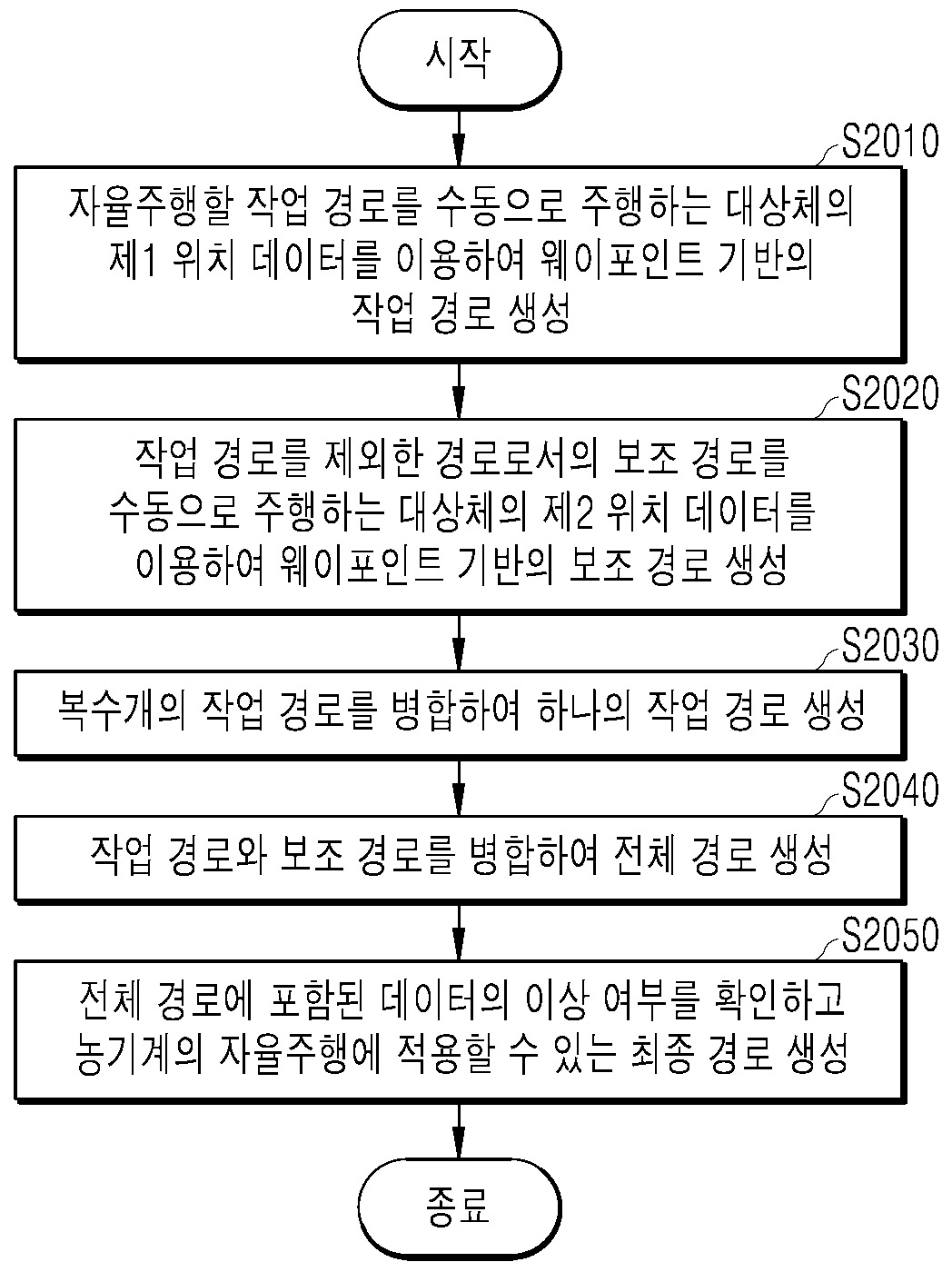
| 1 | 자율주행 경로 생성 장치에 의해 수행되는 자율주행 경로 생성 방법으로서,자율주행할 작업 경로를 수동으로 주행하는 대상체에 대하여 측위센서로부터 수집한 상기 대상체의 제1 위치 데이터를 이용하여 웨이포인트(waypoints) 기반의 작업 경로를 생성하는 단계;상기 작업 경로를 제외한 경로로서의 보조 경로를 수동으로 주행하는 상기 대상체에 대하여 상기 측위센서로부터 수집한 상기 대상체의 제2 위치 데이터를 이용하여 웨이포인트 기반의 보조 경로를 생성하는 단계; 및상기 작업 경로 및 상기 보조 경로를 병합하여 생성한 웨이포인트 기반의 전체 경로로부터, 상기 대상체가 최단거리로 자율주행 할 수 있는 경로를 네트워크 데이터로 생성하는 단계를 포함하고,상기 작업 경로를 생성하는 단계는,웨이포인트 간의 최소거리와, 직선 여부를 결정하는 직선 사이의 각도를 이용하여, 상기 제1 위치 데이터 중 일부를 웨이포인트로 생성하는 단계; 및상기 웨이포인트에 회전구간을 정의하기 위한 기준 각도를 적용하여 상기 웨이포인트가 시작점인지, 종료점인지, 직선구간인지 및 회전구간인지 중 하나를 포함하는 웨이포인트 종류를 지정하는 단계를 포함하는,자율주행 경로 생성 방법. |
| 2 | 삭제 |
| 3 | 제 1 항에 있어서,상기 웨이포인트로 생성하는 단계 이전에, 측지 좌표로 입력되는 상기 제1 위치 데이터를 NED 좌표로 변환하는 단계를 더 포함하고,상기 웨이포인트 종류를 지정하는 단계 이후에,상기 NED 좌표로 표현된 상기 웨이포인트를 측지 좌표로 변환하는 단계를 더 포함하는,자율주행 경로 생성 방법. |
| 4 | 제 1 항에 있어서,상기 웨이포인트로 생성하는 단계는,상기 제1 위치 데이터에 포함되는 제n-1 위치 데이터 및 제n 위치 데이터 간에 생성된 제1 직선의 기울기 각도를 계산하는 단계;상기 제1 위치 데이터에 포함되는 상기 제n 위치 데이터 및 제n+1 위치 데이터 간에 생성된 제2 직선의 기울기 각도를 계산하는 단계;상기 제1 직선의 기울기 각도 및 상기 제2 직선의 기울기 각도 의 차이가 상기 직선 여부를 결정하는 직선 사이의 각도보다 큼에 따라, 최근 생성된 웨이포인트와 상기 제n 위치 데이터 사이의 거리 차이를 계산하는 단계; 및상기 최근 생성된 웨이포인트와 상기 제n 위치 데이터 사이의 거리 차이가 상기 웨이포인트 간의 최소거리보다 큼에 따라 상기 제n 위치 데이터를 웨이포인트로 생성하는 단계를 포함하는,자율주행 경로 생성 방법. |
| 5 | 제 1 항에 있어서,상기 웨이포인트 종류를 지정하는 단계는,제n-1 웨이포인트, 제n 웨이포인트 및 제n+1 웨이포인트 중 상기 제n 웨이포인트가 첫 번째 웨이포인트임에 따라 상기 제n 웨이포인트를 시작점 웨이포인트로 지정하는 단계;상기 제n-1 웨이포인트, 상기 제n 웨이포인트 및 상기 제n+1 웨이포인트 중 상기 제n 웨이포인트가 마지막 웨이포인트임에 따라 상기 제n 웨이포인트를 종료점 웨이포인트로 지정하는 단계;상기 제n-1 웨이포인트 및 상기 제n 웨이포인트 사이의 직선 방위각과, 상기 제n 웨이포인트 및 상기 제n+1 웨이포인트 사이의 직선 방위각의 차이가 상기 회전구간을 정의하기 위한 기준 각도보다 큼에 따라 상기 제n 웨이포인트를 회전구간 웨이포인트로 지정하는 단계; 및상기 제n-1 웨이포인트 및 상기 제n 웨이포인트 사이의 직선 방위각과, 상기 제n 웨이포인트 및 상기 제n+1 웨이포인트 사이의 직선 방위각의 차이가 상기 회전구간을 정의하기 위한 기준 각도보다 작음에 따라 상기 제n 웨이포인트를 직선구간 웨이포인트로 지정하는 단계를 포함하는,자율주행 경로 생성 방법. |
| 6 | 제 1 항에 있어서,상기 작업 경로를 생성하는 단계는,제1 작업 경로의 웨이포인트 및 제2 작업 경로의 웨이포인트를 입력 데이터로 하여 병합된 웨이포인트를 생성하는 단계;상기 최소거리와 상기 각도를 이용하여 상기 병합된 웨이포인트 중 일부를 웨이포인트로 생성하는 단계; 및생성한 웨이포인트에 상기 기준 각도를 적용하여 상기 생성한 웨이포인트가 시작점인지, 종료점인지, 직선구간인지 및 회전구간인지 중 하나를 포함하는 웨이포인트 종류를 지정하는 단계를 더 포함하는,자율주행 경로 생성 방법. |
| 7 | 제 6 항에 있어서, 상기 병합된 웨이포인트를 생성하는 단계는,상기 제1 작업 경로의 인접 웨이포인트로 생성된 제1 직선과, 상기 제2 작업 경로의 인접 웨이포인트로 생성된 제2 직선을 이용하여 직선 기반 교차점 검색을 수행하는 단계;상기 직선 기반 교차점 검색의 수행 결과로 교차점이 존재함에 따라, 마지막 교차점을 기준으로 상기 제1 작업 경로의 웨이포인트와 상기 제2 작업 경로의 웨이포인트를 병합하여 병합된 웨이포인트를 생성하는 단계;상기 직선 기반 교차점 검색의 수행 결과로 교차점이 존재하지 않음에 따라, 상기 제1 작업 경로의 인접 웨이포인트로 생성된 제1 직선과, 상기 제2 작업 경로의 웨이포인트 사이의 거리를 이용하여 거리 기반 교차점 검색을 수행하는 단계; 및상기 거리 기반 교차점 검색의 수행 결과로 교차점이 존재함에 따라, 상기 거리 기반 교차점 검색의 수행 결과로 생성된 교차점을 기준으로 상기 제1 작업 경로의 웨이포인트와 상기 제2 작업 경로의 웨이포인트를 병합하여 병합된 웨이포인트를 생성하는 단계를 더 포함하는,자율주행 경로 생성 방법. |
| 8 | 제 1 항에 있어서,상기 보조 경로를 생성하는 단계는,웨이포인트 간의 최소거리와, 직선 여부를 결정하는 직선 사이의 각도를 이용하여, 상기 제2 위치 데이터 중 일부를 웨이포인트로 생성하는 단계; 및상기 웨이포인트에 회전구간을 정의하기 위한 기준 각도를 적용하여 상기 웨이포인트가 시작점인지, 종료점인지, 직선구간인지 및 회전구간인지 중 하나를 포함하는 웨이포인트 종류를 지정하는 단계를 포함하는,자율주행 경로 생성 방법. |
| 9 | 제 8 항에 있어서,상기 웨이포인트로 생성하는 단계 이전에, 측지 좌표로 입력되는 상기 제2 위치 데이터를 NED 좌표로 변환하는 단계를 더 포함하고,상기 웨이포인트 종류를 지정하는 단계 이후에,상기 NED 좌표로 표현된 상기 웨이포인트를 측지 좌표로 변환하는 단계를 더 포함하는,자율주행 경로 생성 방법. |
| 10 | 제 1 항에 있어서,상기 네트워크 데이터로 생성하는 단계는,상기 작업 경로의 인접 웨이포인트로 생성된 제1 직선과, 상기 보조 경로의 인접 웨이포인트로 생성된 제2 직선을 이용하여 직선 기반 교차점 검색을 수행하는 단계;상기 작업 경로의 인접 웨이포인트로 생성된 제1 직선과 및 상기 보조 경로의 웨이포인트 사이의 거리를 이용하여 거리 기반 교차점 검색을 수행하는 단계; 및상기 작업 경로의 웨이포인트와, 상기 보조 경로의 웨이포인트와, 상기 직선 기반 교차점 검색의 수행 결과에 따른 교차점과, 상기 거리 기반 교차점 검색의 수행 결과에 따른 교차점을 이용하여 전체 경로 데이터를 생성하는 단계; 및상기 전체 경로 데이터로부터 상기 대상체가 최단거리로 자율주행 할 수 있는 경로 데이터를 네트워크 데이터로 생성하는 단계를 포함하는,자율주행 경로 생성 방법. |
| 11 | 자율주행 경로를 생성하는 장치로서,프로세서; 및상기 프로세서와 동작 가능하게 연결되고 상기 프로세서에서 수행되는 적어도 하나의 코드를 저장하는 메모리를 포함하고,상기 메모리는 상기 프로세서를 통해 실행될 때, 상기 프로세서가 자율주행할 작업 경로를 수동으로 주행하는 대상체에 대하여 측위센서로부터 수집한 상기 대상체의 제1 위치 데이터를 이용하여 웨이포인트(waypoints) 기반의 작업 경로를 생성하고,상기 작업 경로를 제외한 경로로서의 보조 경로를 수동으로 주행하는 상기 대상체에 대하여 상기 측위센서로부터 수집한 상기 대상체의 제2 위치 데이터를 이용하여 웨이포인트 기반의 보조 경로를 생성하고,상기 작업 경로 및 상기 보조 경로를 병합하여 생성한 웨이포인트 기반의 전체 경로로부터, 상기 대상체가 최단거리로 자율주행 할 수 있는 경로를 네트워크 데이터로 생성하도록 야기하는 코드를 저장하며,상기 메모리는 상기 프로세서로 하여금,상기 작업 경로를 생성 시에, 웨이포인트 간의 최소거리와, 직선 여부를 결정하는 직선 사이의 각도를 이용하여, 상기 제1 위치 데이터 중 일부를 웨이포인트로 생성하고,상기 웨이포인트에 회전구간을 정의하기 위한 기준 각도를 적용하여 상기 웨이포인트가 시작점인지, 종료점인지, 직선구간인지 및 회전구간인지 중 하나를 포함하는 웨이포인트 종류를 지정하도록 야기하는 코드를 저장하는,자율주행 경로 생성 장치. |
| 12 | 삭제 |
| 13 | 제 11 항에 있어서,상기 메모리는 상기 프로세서로 하여금,상기 웨이포인트로 생성하기 이전에, 측지 좌표로 입력되는 상기 제1 위치 데이터를 NED 좌표로 변환하도록 야기하는 코드를 더 저장하고,상기 웨이포인트 종류를 지정한 이후에, 상기 NED 좌표로 표현된 상기 웨이포인트를 측지 좌표로 변환하도록 야기하는 코드를 더 저장하는,자율주행 경로 생성 장치. |
| 14 | 제 11 항에 있어서,상기 메모리는 상기 프로세서로 하여금,상기 웨이포인트로 생성 시에, 상기 제1 위치 데이터에 포함되는 제n-1 위치 데이터 및 제n 위치 데이터 간에 생성된 제1 직선의 기울기 각도를 계산하고,상기 제1 위치 데이터에 포함되는 상기 제n 위치 데이터 및 제n+1 위치 데이터 간에 생성된 제2 직선의 기울기 각도를 계산하고,상기 제1 직선의 기울기 각도 및 상기 제2 직선의 기울기 각도 의 차이가 상기 직선 여부를 결정하는 직선 사이의 각도보다 큼에 따라, 최근 생성된 웨이포인트와 상기 제n 위치 데이터 사이의 거리 차이를 계산하고,상기 최근 생성된 웨이포인트와 상기 제n 위치 데이터 사이의 거리 차이가 상기 웨이포인트 간의 최소거리보다 큼에 따라 상기 제n 위치 데이터를 웨이포인트로 생성하도록 야기하는 코드를 저장하는,자율주행 경로 생성 장치. |
| 15 | 제 11 항에 있어서,상기 메모리는 상기 프로세서로 하여금,상기 웨이포인트 종류를 지정 시에, 제n-1 웨이포인트, 제n 웨이포인트 및 제n+1 웨이포인트 중 상기 제n 웨이포인트가 첫 번째 웨이포인트임에 따라 상기 제n 웨이포인트를 시작점 웨이포인트로 지정하고,상기 제n-1 웨이포인트, 상기 제n 웨이포인트 및 상기 제n+1 웨이포인트 중 상기 제n 웨이포인트가 마지막 웨이포인트임에 따라 상기 제n 웨이포인트를 종료점 웨이포인트로 지정하고,상기 제n-1 웨이포인트 및 상기 제n 웨이포인트 사이의 직선 방위각과, 상기 제n 웨이포인트 및 상기 제n+1 웨이포인트 사이의 직선 방위각의 차이가 상기 회전구간을 정의하기 위한 기준 각도보다 큼에 따라 상기 제n 웨이포인트를 회전구간 웨이포인트로 지정하고,상기 제n-1 웨이포인트 및 상기 제n 웨이포인트 사이의 직선 방위각과, 상기 제n 웨이포인트 및 상기 제n+1 웨이포인트 사이의 직선 방위각의 차이가 상기 회전구간을 정의하기 위한 기준 각도보다 작음에 따라 상기 제n 웨이포인트를 직선구간 웨이포인트로 지정하도록 야기하는 코드를 저장하는,자율주행 경로 생성 장치. |
| 16 | 제 11 항에 있어서,상기 메모리는 상기 프로세서로 하여금,상기 작업 경로를 생성 시에, 제1 작업 경로의 웨이포인트 및 제2 작업 경로의 웨이포인트를 입력 데이터로 하여 병합된 웨이포인트를 생성하고,상기 최소거리와 상기 각도를 이용하여 상기 병합된 웨이포인트 중 일부를 웨이포인트로 생성하고,생성한 웨이포인트에 상기 기준 각도를 적용하여 상기 생성한 웨이포인트가 시작점인지, 종료점인지, 직선구간인지 및 회전구간인지 중 하나를 포함하는 웨이포인트 종류를 지정하도록 야기하는 코드를 더 생성하는,자율주행 경로 생성 장치. |
| 17 | 제 16 항에 있어서, 상기 메모리는 상기 프로세서로 하여금,상기 병합된 웨이포인트를 생성 시에, 상기 제1 작업 경로의 인접 웨이포인트로 생성된 제1 직선과, 상기 제2 작업 경로의 인접 웨이포인트로 생성된 제2 직선을 이용하여 직선 기반 교차점 검색을 수행하고,상기 직선 기반 교차점 검색의 수행 결과로 교차점이 존재함에 따라, 마지막 교차점을 기준으로 상기 제1 작업 경로의 웨이포인트와 상기 제2 작업 경로의 웨이포인트를 병합하여 병합된 웨이포인트를 생성하고,상기 직선 기반 교차점 검색의 수행 결과로 교차점이 존재하지 않음에 따라, 상기 제1 작업 경로의 인접 웨이포인트로 생성된 제1 직선과, 상기 제2 작업 경로의 웨이포인트 사이의 거리를 이용하여 거리 기반 교차점 검색을 수행하고,상기 거리 기반 교차점 검색의 수행 결과로 교차점이 존재함에 따라, 상기 거리 기반 교차점 검색의 수행 결과로 생성된 교차점을 기준으로 상기 제1 작업 경로의 웨이포인트와 상기 제2 작업 경로의 웨이포인트를 병합하여 병합된 웨이포인트를 생성하도록 야기하는 코드를 더 저장하는,자율주행 경로 생성 장치. |
| 18 | 제 11 항에 있어서,상기 메모리는 상기 프로세서로 하여금,상기 보조 경로를 생성 시에, 웨이포인트 간의 최소거리와, 직선 여부를 결정하는 직선 사이의 각도를 이용하여, 상기 제2 위치 데이터 중 일부를 웨이포인트로 생성하고,상기 웨이포인트에 회전구간을 정의하기 위한 기준 각도를 적용하여 상기 웨이포인트가 시작점인지, 종료점인지, 직선구간인지 및 회전구간인지 중 하나를 포함하는 웨이포인트 종류를 지정하도록 야기하는 코드를 저장하는,자율주행 경로 생성 장치. |
| 19 | 제 18 항에 있어서,상기 메모리는 상기 프로세서로 하여금,상기 웨이포인트로 생성하기 이전에, 측지 좌표로 입력되는 상기 제2 위치 데이터를 NED 좌표로 변환하도록 야기하는 코드를 더 저장하고,상기 웨이포인트 종류를 지정한 이후에, 상기 NED 좌표로 표현된 상기 웨이포인트를 측지 좌표로 변환하도록 야기하는 코드를 더 저장하는,자율주행 경로 생성 장치. |
| 20 | 제 11 항에 있어서,상기 메모리는 상기 프로세서로 하여금,상기 네트워크 데이터로 생성 시에, 상기 작업 경로의 인접 웨이포인트로 생성된 제1 직선과, 상기 보조 경로의 인접 웨이포인트로 생성된 제2 직선을 이용하여 직선 기반 교차점 검색을 수행하고,상기 작업 경로의 인접 웨이포인트로 생성된 제1 직선과 및 상기 보조 경로의 웨이포인트 사이의 거리를 이용하여 거리 기반 교차점 검색을 수행하고,상기 작업 경로의 웨이포인트와, 상기 보조 경로의 웨이포인트와, 상기 직선 기반 교차점 검색의 수행 결과에 따른 교차점과, 상기 거리 기반 교차점 검색의 수행 결과에 따른 교차점을 이용하여 전체 경로 데이터를 생성하고,상기 전체 경로 데이터로부터 상기 대상체가 최단거리로 자율주행 할 수 있는 경로 데이터를 네트워크 데이터로 생성하도록 야기하는 코드를 저장하는,자율주행 경로 생성 장치. |