| 번호 | 청구항 |
|---|---|
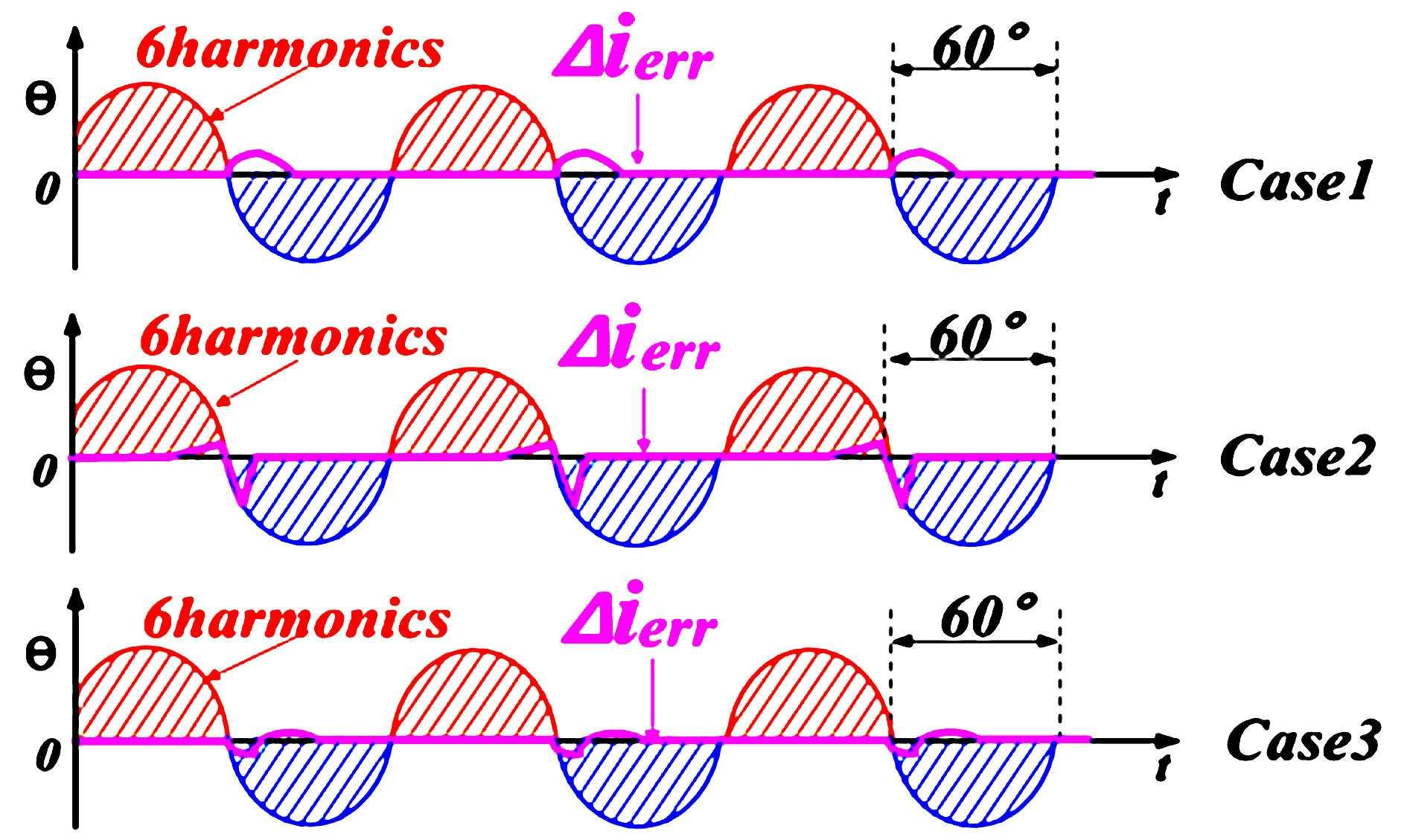
| 6 | 제5항에 있어서,상기 추정 회전자 속도가 상기 실제 회전자 속도보다 빠르면, 상전환 후 30°구간에서 양의 값을 갖는 전류 오차 성분에 음의 부호를 부여하여 적분한 후 상기 추정 회전자의 속도를 보상하는 것을 특징으로 하는 위치센서 없는 브러시리스 직류모터의 모델링 전류를 이용한 회전자 위치 오차 보상 방법. |
| 1 | 위치센서 없는 브러시리스 직류모터에서 추정 회전자의 속도와 실제 회전자의 속도의 오차에 따른 회전자의 위치 오차에 의해 결정되는 전류 오차 성분을 측정하는 단계;상기 전류 오차 성분에 부호를 부여한 후 적분하는 단계;상기 적분된 값으로 역기전력 오차 성분을 구한 후 회전자의 속도 오차 성분을 구하는 단계; 및상기 속도 오차 성분을 상기 추정 회전자 속도에 보상하는 단계;를 포함하는 것을 특징으로 하는 위치센서 없는 브러시리스 직류모터의 모델링 전류를 이용한 회전자 위치 오차 보상 방법. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 전류 오차 성분에 부호를 부여하기 이전에,상기 추정 회전자 위치를 이용하여 60°구간마다 상전환된 6고조파를 생성하는 단계를 더 포함하는 것을 특징으로 하는 위치센서 없는 브러시리스 직류모터의 모델링 전류를 이용한 회전자 위치 오차 보상 방법. |
| 4 | 제3항에 있어서,상기 전류 오차 성분에 부호를 부여하는 단계에서는, 상기 6고조파의 상 위치에 따라 상기 전류 오차 성분에 +1 또는 -1의 부호를 부여하는 것을 특징으로 하는 위치센서 없는 브러시리스 직류모터의 모델링 전류를 이용한 회전자 위치 오차 보상 방법. |
| 5 | 제4항에 있어서,상기 전류 오차 성분이 발생한 위치를 통해 상기 추정 회전자의 속도가 상기 실제 회전자의 속도보다 빠른지 또는 느린지를 판단하는 것을 특징으로 하는 위치센서 없는 브러시리스 직류모터의 모델링 전류를 이용한 회전자 위치 오차 보상 방법. |
| 7 | 제5항에 있어서,상기 추정 회전자 속도가 상기 실제 회전자 속도보다 느리면, 상전환 전,후 30°구간에서 양의 값과 음의 값을 갖는 전류 오차 성분에 상전환 전에는 양의 부호를 부여하고 상전환 후에는 음의 부호를 부여하여 적분한 후 상기 추정 회전자의 속도를 보상하는 것을 특징으로 하는 위치센서 없는 브러시리스 직류모터의 모델링 전류를 이용한 회전자 위치 오차 보상 방법. |