| 번호 | 청구항 |
|---|---|
| 1 | 드론 기반 데이터 수집을 위한 랑데부 포인트 교체 방법에 있어서,상기 드론이 자신의 위치를 알리는 제 1 메시지를 주변에 방송하는 제 1 단계;주변과 관련된 정보를 수집하는 복수의 센서가 상기 제 1 메시지에 대응하여, 에너지 잔량과 상기 제 1 메시지에 대한 RSSI(Received Signal Strength Indication)를 측정하는 제 2 단계;상기 복수의 센서가 상기 에너지 잔량과 상기 RSSI 값을 포함하는 제 2 메시지를 상기 드론으로 전송하는 제 3 단계;상기 드론이 상기 에너지 잔량과 상기 RSSI 값을 이용하여 상기 복수의 센서 중 하나의 랑데부 포인트를 지정하는 제 4 단계;상기 드론이 상기 랑데부 포인트로 지정된 사실을 알리는 제 3 메시지를 상기 지정된 랑데부 포인트로 전송하는 제 5 단계;상기 랑데부 포인트가, 상기 복수의 센서 중 상기 랑데부 포인트를 제외한 센서가 센싱한 정보를 수집하는 제 6 단계; 및상기 랑데부 포인트가 상기 드론으로 수집한 정보를 전송하는 제 7 단계;를 포함하되,상기 제 3 단계는,상기 복수의 센서가 상기 에너지 잔량과 상기 RSSI를 이용하여 계산된 노드 값이 미리 설정된 기준 값 이상인지 여부를 판단하는 제 3-1 단계; 및상기 복수의 센서 중 상기 노드 값이 상기 기준 값 이상인 제 1 센서가 상기 드론으로 상기 제 2 메시지를 전송하는 제 3-2 단계;를 포함하고,상기 계산된 노드 값은 상기 에너지 잔량과 상기 RSSI 값에 비례하며,상기 제 4 단계에서,상기 드론은 상기 에너지 잔량과 상기 RSSI 값을 이용하여 상기 제 1 센서 중 계산된 노드 값이 가장 높은 센서를 상기 랑데부 포인트로 지정하고,상기 제 4 단계에서 상기 랑데부 포인트가 지정되지 않은 경우,상기 제 4 단계와 상기 제 5 단계 사이에는,상기 드론이 상기 복수의 센서 중 미리 지정된 센서를 상기 랑데부 포인트로 지정하는 제 4-1 단계;를 더 포함하는 것을 특징으로 하는 드론 기반 데이터 수집을 위한 랑데부 포인트 교체 방법. |
| 2 | 제 1항에 있어서,상기 제 1 단계 이전에는,상기 드론이 공사 현장 영역으로 진입하는 제 0.5 단계;를 더 포함하고,상기 복수의 센서는 상기 공사 현장과 관련된 정보를 수집하며,상기 제 4 단계에서 상기 랑데부 포인트가 복수로 지정되는 경우,상기 제 4 단계에서 상기 제 5 단계로 진행하기 이전에,상기 제 1 단계 내지 상기 제 4 단계를 다시 진행하는 제 4-2 단계;를 더 포함하는 것을 특징으로 하는 드론 기반 데이터 수집을 위한 랑데부 포인트 교체 방법. |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 삭제 |
| 6 | 삭제 |
| 7 | 삭제 |
| 8 | 삭제 |
| 9 | 제 2항에 있어서,상기 제 4-2 단계는,상기 랑데부 포인트가 한 개로 지정될 때까지 반복하여 수행되는 것을 특징으로 하는 드론 기반 데이터 수집을 위한 랑데부 포인트 교체 방법. |
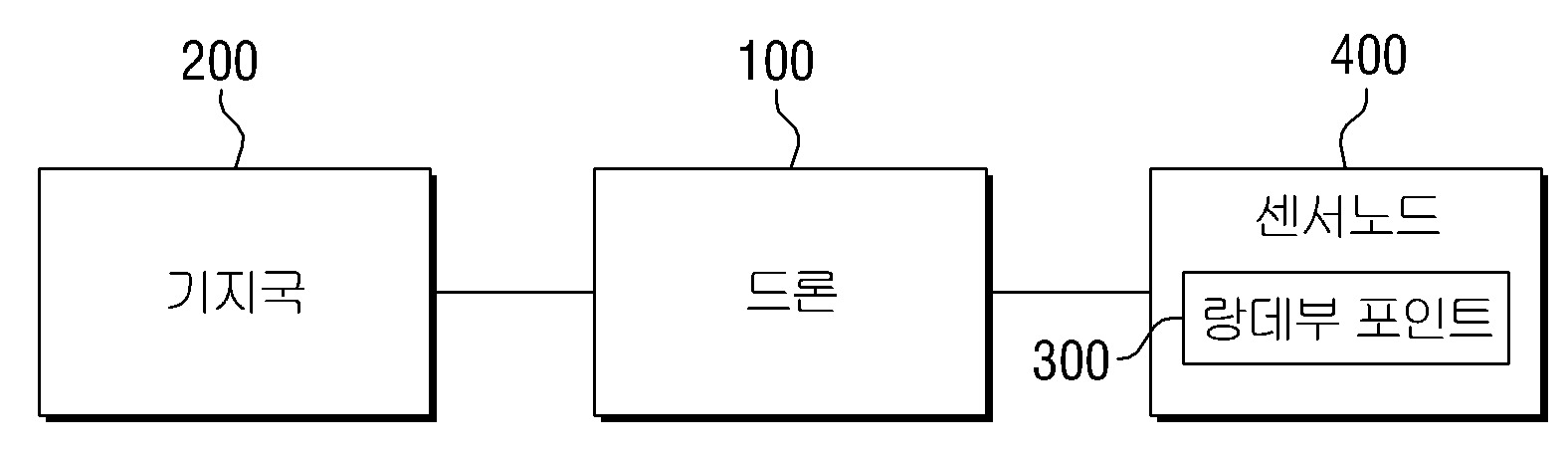
| 10 | 제 1항에 있어서,상기 제 7 단계 이후,상기 수집한 정보를 수신한 드론이 기지국으로 복귀하는 제 8 단계;를 더 포함하고,상기 드론, 복수의 센서 및 기지국은 근거리 통신 및 원거리 통신 중 적어도 하나를 이용하여 통신하는 것을 특징으로 하는 드론 기반 데이터 수집을 위한 랑데부 포인트 교체 방법. |
| 11 | 제 10항에 있어서,상기 근거리 통신은 블루투스(Bluetooth), RFID(Radio Frequency Identification), 적외선 통신(IrDA, infrared Data Association), UWB(Ultra-Wideband), ZigBee, Wi-Fi (Wireless Fidelity) 기술을 포함하고,상기 원거리 통신은 CDMA(code division multiple access), FDMA(frequency division multiple access), TDMA(time division multiple access), OFDMA(orthogonal frequency division multiple access), SC-FDMA(single carrier frequency division multiple access) 기술을 포함하는 것을 특징으로 하는 드론 기반 데이터 수집을 위한 랑데부 포인트 교체 방법. |
| 12 | 랑데부 포인트를 교체하기 위한 드론에 있어서,자신의 위치를 알리는 제 1 메시지를 주변에 방송하고, 주변과 관련된 정보를 수집하는 복수의 센서가 상기 제 1 메시지에 대응하여, 에너지 잔량과 상기 제 1 메시지에 대한 RSSI(Received Signal Strength Indication)를 측정하는 경우,상기 복수의 센서로부터 상기 에너지 잔량과 상기 RSSI 값을 포함하는 제 2 메시지를 수신하며, 상기 에너지 잔량과 상기 RSSI 값을 이용하여 상기 복수의 센서 중 하나의 랑데부 포인트를 지정하고, 상기 랑데부 포인트로 지정된 사실을 알리는 제 3 메시지를 상기 지정된 랑데부 포인트로 전송하고, 상기 랑데부 포인트가, 상기 복수의 센서 중 상기 랑데부 포인트를 제외한 센서가 센싱한 정보를 수집하는 경우,상기 랑데부 포인트가 수집한 정보를 수신하며,상기 드론은 상기 에너지 잔량과 상기 RSSI 값을 이용하여 계산된 노드 값이 가장 높은 센서를 상기 랑데부 포인트로 지정하고,상기 랑데부 포인트가 지정되지 않은 경우,상기 드론은, 상기 복수의 센서 중 미리 지정된 센서를 상기 랑데부 포인트로 지정하고,상기 랑데부 포인트가 복수로 지정되는 경우,상기 드론은, 상기 랑데부 포인트를 지정하기 위한 동작을 반복하여 수행하는 것을 특징으로 하는 랑데부 포인트 교체를 위한 드론. |
| 13 | 제 12항에 있어서,상기 드론은 공사 현장 영역으로 진입하고,상기 복수의 센서는 상기 공사 현장과 관련된 정보를 수집하는 것을 특징으로 하는 랑데부 포인트 교체를 위한 드론. |
| 14 | 삭제 |
| 15 | 삭제 |
| 16 | 삭제 |
| 17 | 제 12항에 있어서,상기 드론은,상기 랑데부 포인트가 한 개로 지정될 때까지 상기 랑데부 포인트를 지정하기 위한 동작을 반복하여 수행하는 것을 특징으로 하는 랑데부 포인트 교체를 위한 드론. |
| 18 | 제 12항에 있어서,상기 수집한 정보를 수신한 드론은 기지국으로 복귀하고,상기 드론, 복수의 센서 및 기지국은 근거리 통신 및 원거리 통신 중 적어도 하나를 이용하여 통신하는 것을 특징으로 하는 랑데부 포인트 교체를 위한 드론. |
| 19 | 제 18항에 있어서,상기 근거리 통신은 블루투스(Bluetooth), RFID(Radio Frequency Identification), 적외선 통신(IrDA, infrared Data Association), UWB(Ultra-Wideband), ZigBee, Wi-Fi (Wireless Fidelity) 기술을 포함하고,상기 원거리 통신은 CDMA(code division multiple access), FDMA(frequency division multiple access), TDMA(time division multiple access), OFDMA(orthogonal frequency division multiple access), SC-FDMA(single carrier frequency division multiple access) 기술을 포함하는 것을 특징으로 하는 랑데부 포인트 교체를 위한 드론. |
| 20 | 삭제 |
| 21 | 삭제 |
| 22 | 삭제 |
| 23 | 삭제 |