| 번호 | 청구항 |
|---|---|
| 16 | 제 11 항에 있어서,상기 코어 돌출부는 상기 솔레노이드 코일 외경과 동일한 직경을 갖는 것을 특징으로 하는 이동형 마이크로로봇 제어시스템. |
| 15 | 제 11 항에 있어서,상기 코어 돌출부는 돌출이 시작되는 부분의 직경이 상기 솔레노이드 코일의 내경과 동일하고, 상기 코어 돌출부 말단의 직경은 솔레노이드 코일의 내경보다 작은 것은 특징으로 하는 이동형 마이크로로봇 제어시스템. |
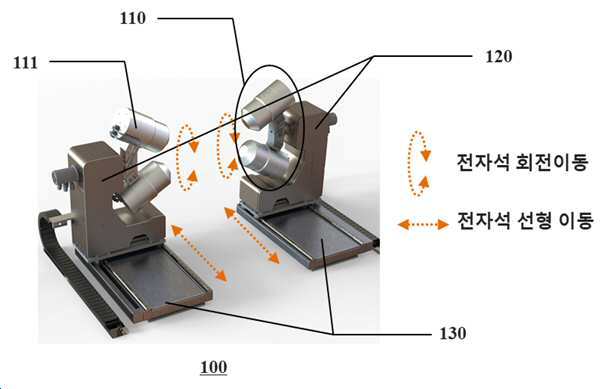
| 1 | 2차원 평면상에 상호 대칭되도록 배치되는 2개의 전자석 코일을 포함하는 자기장 생성부;상기 자기장 생성부를 회전이동 시킬 수 있는 회전이동부; 및상기 자기장 생성부를 선형이동 시킬 수 있는 선형이동부;를 포함하고,상기 전자석 코일은 상자성체로 이루어진 자기코어 및 자기코어 외부에 코일이 권선되어 있는 솔레노이드 코일이며,상기 솔레노이드 코일은 자기코어 외부에 코일이 권취되어 있지 않은 코어 돌출부를 포함하는 것인, 이동형 마이크로로봇 제어장치. |
| 2 | 제 1 항에 있어서,상기 2차원 평면과 30 내지 90°를 이루는 2차원 평면상에 상호 대칭되도록 배치되는 2개의 전자석 코일을 포함하는 자기장 생성부를 더 포함하는 것을 특징으로 하는 이동형 마이크로로봇 제어장치. |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 제 1 항에 있어서,상기 코어 돌출부는 돌출이 시작되는 부분의 직경이 상기 솔레노이드 코일의 내경과 동일하고, 상기 코어 돌출부 말단의 직경은 솔레노이드 코일의 내경보다 작은 것은 특징으로 하는 이동형 마이크로로봇 제어장치. |
| 6 | 제 1 항에 있어서,상기 코어 돌출부는 상기 솔레노이드 코일 외경과 동일한 직경을 갖는 것을 특징으로 하는 이동형 마이크로로봇 제어장치. |
| 7 | 2차원 평면상에 상호 대칭되도록 배치되는 2개의 전자석 코일을 포함하는 자기장 생성부;상기 자기장 생성부를 회전이동 시킬 수 있는 회전이동부; 및상기 자기장 생성부를 선형이동 시킬 수 있는 선형이동부;를 포함하고,상기 전자석 코일은 상자성체로 이루어진 자기코어 및 자기코어 외부에 코일이 권선되어 있는 솔레노이드 코일이며,상기 솔레노이드 코일은 자기 차폐부를 포함하는 것인, 이동형 마이크로로봇 제어장치. |
| 8 | 제 7 항에 있어서,상기 솔레노이드 코일 중 코일이 권선된 코일 권선부와 자기 차폐부의 길이비는 4 내지 1 : 1 내지 3인 것을 특징으로 하는 이동형 마이크로로봇 제어장치. |
| 9 | 제 1 항 내지 제 2 항 및 제 7 항 중 어느 한 항에 있어서,상기 회전이동부는 자기장 생성부의 일측면에 연결되어 자기장 생성을 원하는 관심영역을 중심으로 자기장 생성부가 원형으로 회전할 수 있도록 구비되는 되는 것을 특징으로 하는 이동형 마이크로로봇 제어장치. |
| 10 | 제 1 항 내지 제 2 항 및 제 7 항 중 어느 한 항에 있어서,상기 선형이동부는 회전이동부의 일측면에 연결되어 자기장 생성을 원하는 관심영역으로 자기장생성부를 선형으로 이동시킬 수 있도록 구비되는 것을 특징으로 하는 이동형 마이크로로봇 제어장치. |
| 11 | 베드;베드의 길이방향으로 양측면에 구비되는 이동형 마이크로로봇 제어장치;베드의 길이방향으로 일 말단에 구비되는 엑스레이 장치; 및상기 이동형 마이크로로봇 제어장치 및 엑스레이 장치를 제어하기 위한 제어장치;를 포함하고, 상기 이동형 마이크로로봇 제어장치는, 2차원 평면상에 상호 대칭되도록 배치되는 2개의 전자석 코일을 포함하는 자기장 생성부;상기 자기장 생성부를 회전이동 시킬 수 있는 회전이동부; 및상기 자기장 생성부를 선형이동 시킬 수 있는 선형이동부;를 포함하고,상기 전자석 코일은 상자성체로 이루어진 자기코어 및 자기코어 외부에 코일이 권선되어 있는 솔레노이드 코일이며,상기 솔레노이드 코일은 자기코어 외부에 코일이 권취되어 있지 않은 코어 돌출부를 포함하는 것인, 이동형 마이크로로봇 제어시스템. |
| 12 | 제 11 항에 있어서,상기 2차원 평면과 30 내지 90°를 이루는 2차원 평면상에 상호 대칭되도록 배치되는 2개의 전자석 코일을 포함하는 자기장 생성부를 더 포함하는 것을 특징으로 하는 이동형 마이크로로봇 제어시스템. |
| 13 | 삭제 |
| 14 | 삭제 |
| 17 | 베드;베드의 길이방향으로 양측면에 구비되는 이동형 마이크로로봇 제어장치;베드의 길이방향으로 일 말단에 구비되는 엑스레이 장치; 및상기 이동형 마이크로로봇 제어장치 및 엑스레이 장치를 제어하기 위한 제어장치;를 포함하고, 상기 이동형 마이크로로봇 제어장치는, 2차원 평면상에 상호 대칭되도록 배치되는 2개의 전자석 코일을 포함하는 자기장 생성부;상기 자기장 생성부를 회전이동 시킬 수 있는 회전이동부; 및상기 자기장 생성부를 선형이동 시킬 수 있는 선형이동부;를 포함하고,상기 전자석 코일은 상자성체로 이루어진 자기코어 및 자기코어 외부에 코일이 권선되어 있는 솔레노이드 코일이며,상기 솔레노이드 코일은 자기 차폐부를 포함하는 것인, 이동형 마이크로로봇 제어시스템. |
| 18 | 제 17 항에 있어서,상기 솔레노이드 코일 중 코일이 권선된 코일 권선부와 자기 차폐부의 길이비는 4 내지 1 : 1 내지 3인 것을 특징으로 하는 이동형 마이크로 로봇 제어장치. |
| 19 | 제 11 항 내지 제 12 항 및 제 17항 중 어느 한 항에 있어서,상기 회전이동부는 자기장 생성부의 일측면에 연결되어 자기장 생성을 원하는 관심영역을 중심으로 자기장 생성부가 원형으로 회전할 수 있도록 구비되는 되는 것을 특징으로 하는 이동형 마이크로로봇 제어시스템. |
| 20 | 제 11 항 내지 제 12 항 및 제 17항 중 어느 한 항에 있어서,상기 선형이동부는 회전이동부의 일측면에 연결되어 자기장 생성을 원하는 관심영역으로 자기장생성부를 선형으로 이동시킬 수 있도록 구비되는 것을 특징으로 하는 이동형 마이크로로봇 제어시스템. |